
This is my second quad and my first build after having flown an RTF Falcon 250 until now. I wanted to get a top spec replacement that I won't outgrow while being conservative with my budget. This is what I came up with.
Specs
- 3S-6S capable (5S-6S only with more aggresive props such as T5050C)
- Dry weight: 396g. With Battery: 552g.
- Flight time: 2:30-3:30 minutes
- Max draw: 80A
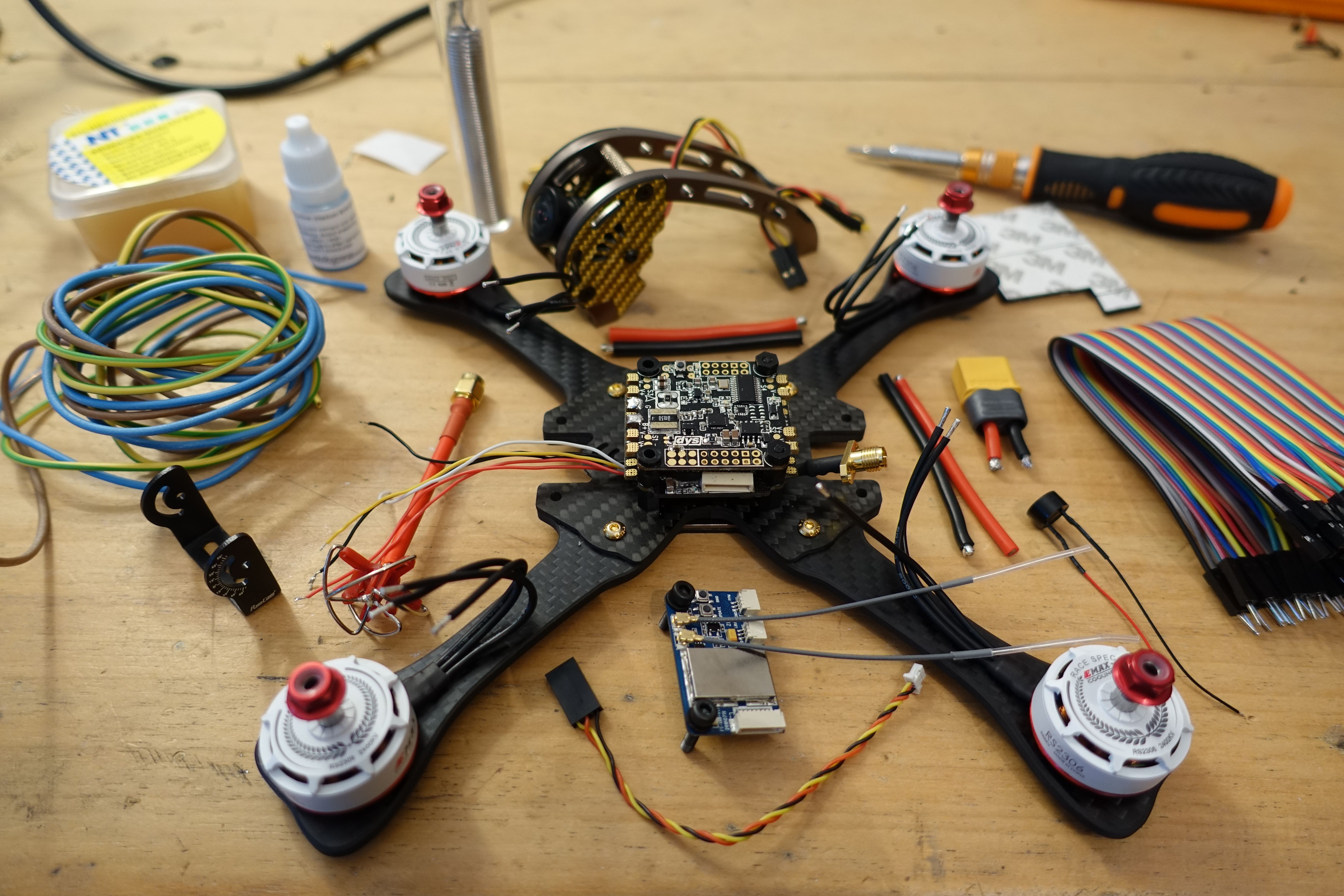
Component choice
Reasons for choosing components were:
- Configure everything from OSD (PIDs + Vtx): DYS F4 FC + TBS Unify Pro Race
- Performance: RS2306 + DYS F30A
- Efficiency: RS2306 + V1S V3
- Durability: GEPRC Leopard frame (4mm arms + aluminium cage)
- Wide dynamic range camera (I often fly at sunset): Runcam Eagle
- Easy to setup ESC (huge mistake, see cons). The ESC and FC were made for each other.
Conscious sacrifices:
- Heavy build, dry weight is 396 grams. Mainly due to heavy motors (but lots of torque gained) and heavy frame (but high durability). (High torque with a heavy built is actually good for acro).
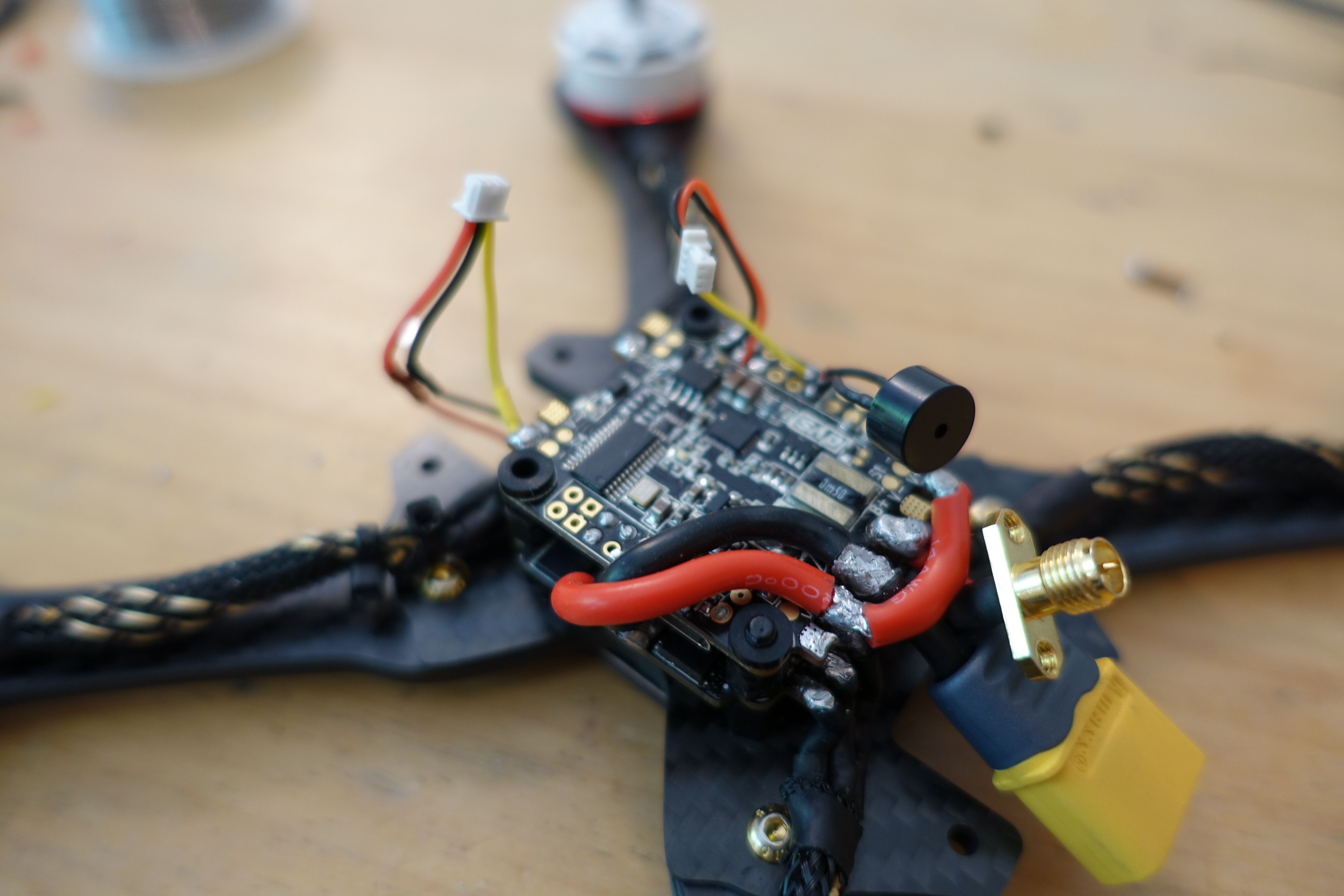
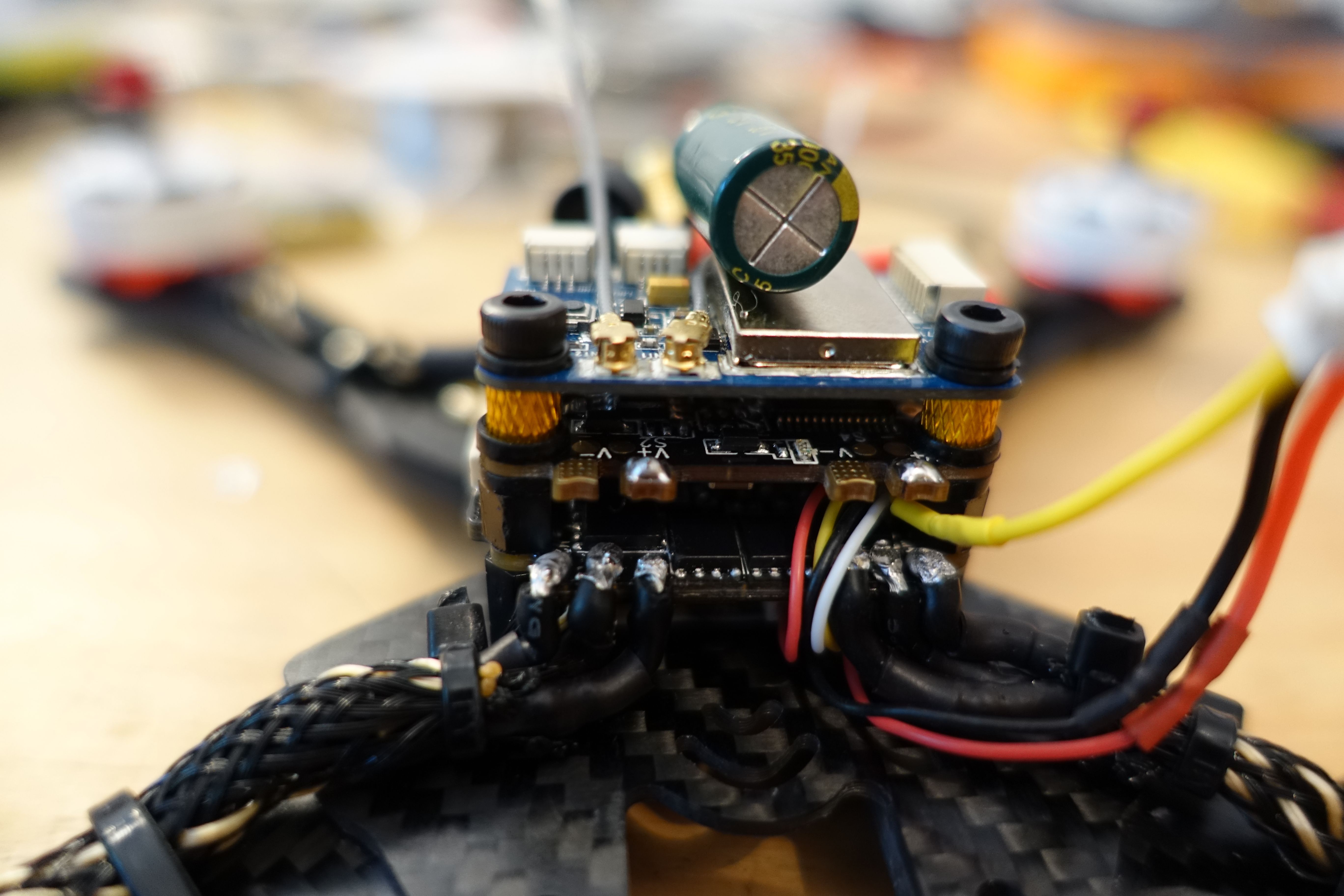
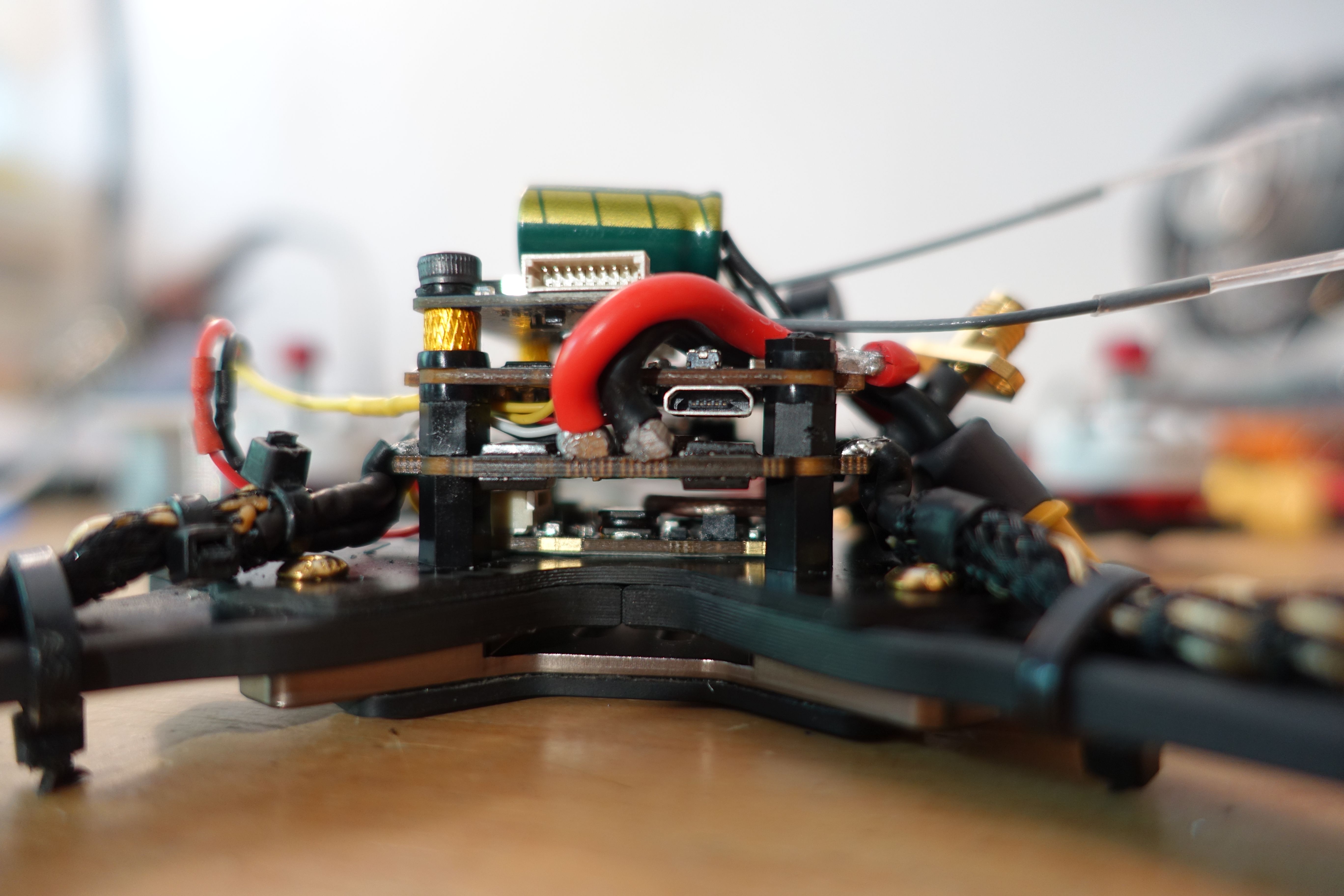
- Super tight stack. This was a real pain to build and fit, I had to sand down the nylon screws and spacers at every level for it to fit. Mainly due to using a 4in1 ESC (which I thought would be the natural thing to pair with the FC).
Problems discovered after building:
- Camera side plates had to be drilled and sanded
- Having to solder multiple thick wires to get current sensor working. This is due to the fact that the F30A 4in1 ESC does not have a current sensor as you would expect given that it was made on purpose to be used with this FC.
- ESC blew up within 10 batteries. I believe not being able to mount caps on a 4in1 coupled with the N52 magnets of the RS2306 is too risky
- Camera angle is limited to about 45º due to the camera connector touching top plate of receiver
- Camera lens is exposed, it exposes the lens about 2 mm. You can't drill your own holes either because the camera would run into the stack.
Alternative components
- Highly recommend using different ESCs unless you really like the looks. Racerstar TATTO 35A would be my pick.
- If not using 4in1 ESC, the Runcam Split would fit and provide the same as the Eagle and eliminate the need for GoPro
- If you have bigger capacitors available, go for it, but mind the space. These motors are known to have extremely high feedback spikes.
- If you want to race with this, use DAL Cyclone T5050 props
- The black version of the motor is rumoured to have improved magnets glue and matches the frame better.
- You will not need higher C rated batteries with the original setup, but you'll want to go with the 90C version of the battery if mounting the Cyclone props. These draw 120A at max throttle!
- I am running plastic based sleeve. It's not super durable and it melts if you try to use shrink wrap and are not careful. I'd recommend paracord instead.
- I originally bought a TX801 VTX for this build which did fit glued at the bottom, but immediately realised due to lack of space changing channels would be a pain (something I do frequently due to flying in a flying field with other pilots) and bought the unify pro for it's smartaudio capabilities (and cleaner emission + pit mode as a bonus). If this is not a requirement for you, stick with the cheaper TX801
Other details:
- The sleeving used is 4mm. This was a perfect fit.
- The motor wires are just 1cm short from the ESC (rotating it wouldn't help either). You'll have to get some 20AWG wire and cut small pieces to reach the pads.
- I can't find a good answer on how to wire the current sensor. My intuition says the 2 pads closer to the battery lead are going to be the ones taking all of the current even if you wire all 4 pads, so I've only soldered those (soldering the other two would have messed up the spacing on my stack anyway).
- The VTX comes with SMA connector by default. An RPSMA adapter is sold separately which I needed because I reused antennas from previous quad. If that's not the case for you, buy SMA antennas!
- You absolutely need the thread lock. These motors are known to run very hot out of the box due to shaft screw too tight, you need to loosen it as much as possible without allowing vertical play of the bell. If you then don't use thread lock it will come loose after a few flights. You also need to use it on the frame, specially the screws that hold the aluminium cage on. They came loose after just 1 flight without thread lock!
- You can get the same frame with stretched X configuration (or even swap the arms on this one), or change the golden details to blue: search for GEPRC Leopard LX5.
Conclusion
All in all, while a pain in the ass to build due to lack of space, this quad flies like a dream and performs very well. For how heavy it is, I'm getting very decent flight times and very moderate current draw. The frame is super sturdy and well finished for being a clone and except for the stuff I mentioned above in alternative components, I would do it all over again if I lost this one!
Photos














Yea man! Awesome write up! Good job on that :)