
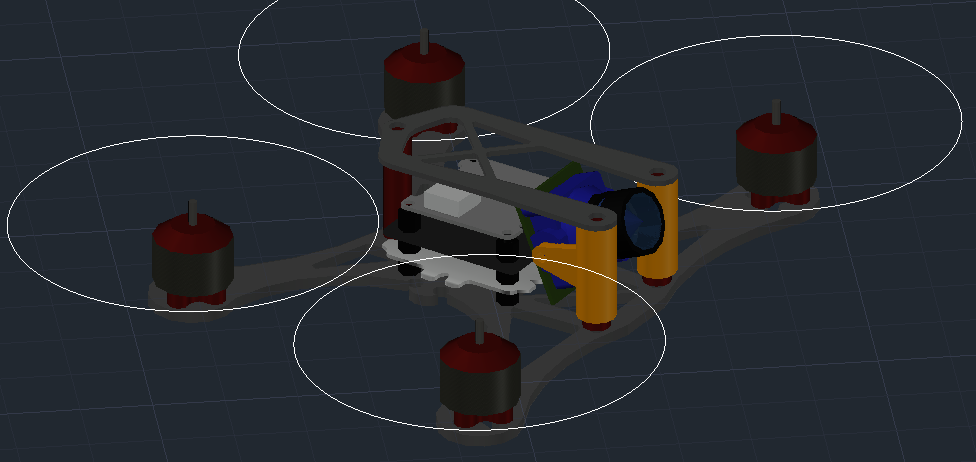
so this is the second version of this frame with some minor tweaks to improve things a little, unfortunately the first 2 version have died in high speed impacts and bird attacks so I'm waiting on the post man to get this bad boy back in the air..
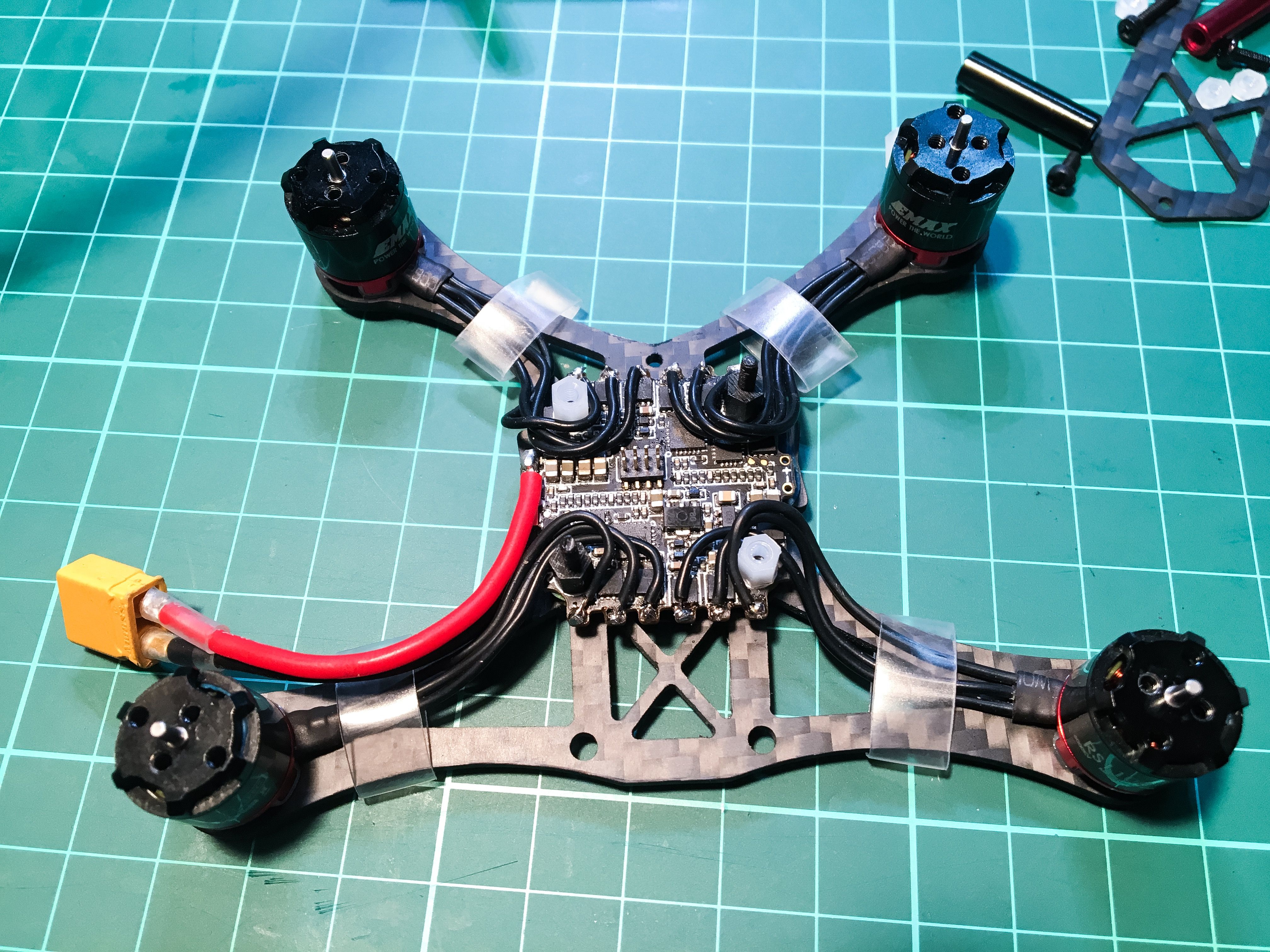
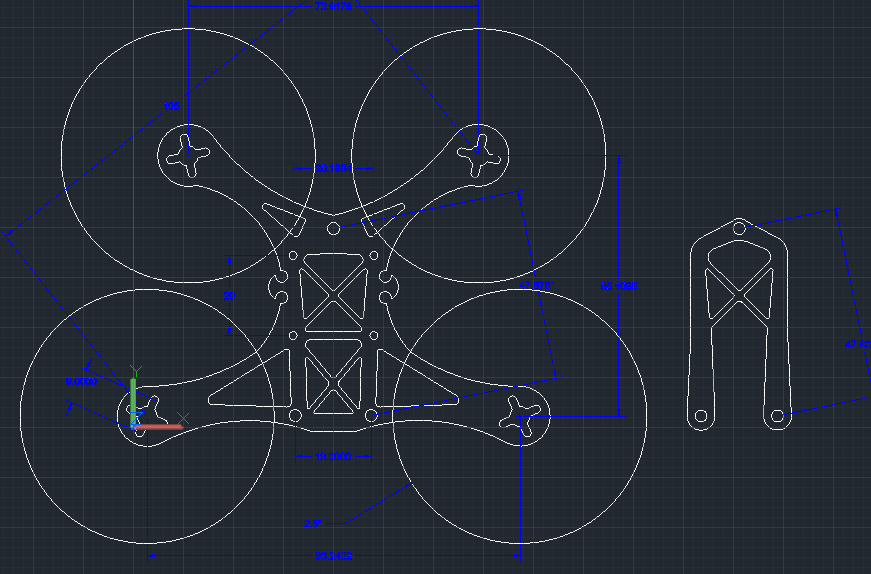
so the improvements over the first version are a little more clearance for slightly larger props, moving the rear standoff back a touch to improve clearance from the esc board, m3 front stand offs and lastly spacing at the front for a runcam/foxeer micro cam. this resulted in a the wheelbase increasing from 103mm to 105mm but thats not a massive issue..
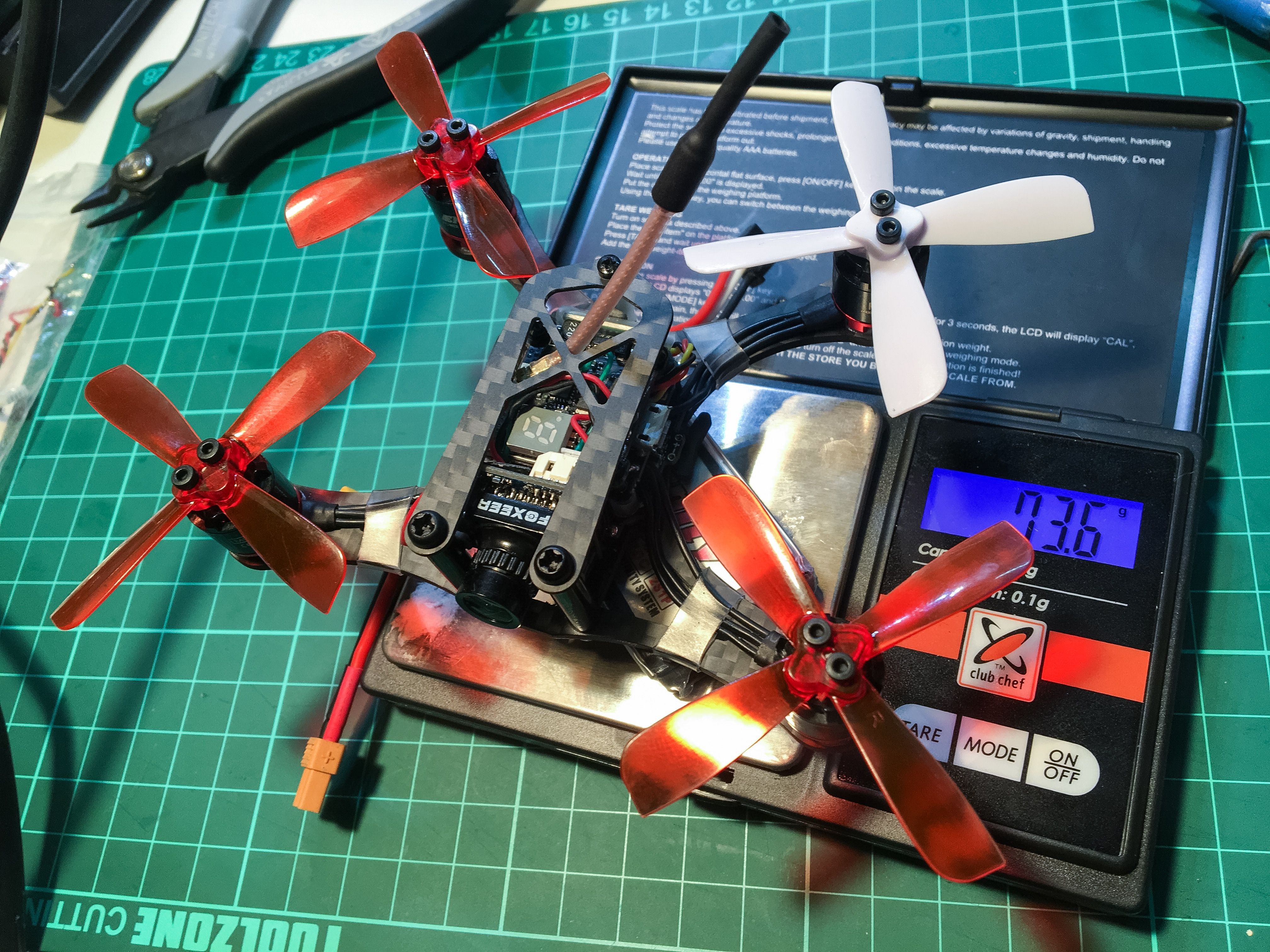
the protoype has been flying the new emax se1106 6000kv motors on both 3 and 4s... its quite frankly stupid fast, i can't say for sure how fast it is but its somewhere between 70-100mph, it eats batteries and is pushing a power to weight ration in the 12:1 region. Its way nicer to fly on 3s than 4 but its a bit like crack its super addictive and moreish.. constantly flying 4s does require in-depth pre flighting the Kwad before every session as it has a tendency to rattle stuff loose and then suck it through the props ( last time it was the sensor board for the micro camera with predictable results ). any way can't wait to get this total beast of a machine back in the air with the updated frame design and start testing some cut down 3" props and see if i can crack that 100mph wall..
Still needs one more revision to the camera bay, it needs more room to clear the plug on the foxeer micro as the rev 2 is only getting 20° of tilt
Photos









tell me about the bird attacks...
haha the first one i have on video the second busted the Kwad
https://vimeo.com/231637636