
Introduction
Something a bit different! This build centers on the Strix Nano Goblin airframe. I am predominantly a quad pilot, but I decieded to give this build a crack for two main reasons:
- Flight time. I am getting a little tired of having to land every 5 minutes for more juice. This bad boy has flight times of 50-60mins, but I am yet to confirm this myself
- iNav looks really cool. I wanted to give it a crack without having to make heavy modifications to my existing quads (to ensure good signal away from the carbon etc).
Build Notes
For the build itself, I mostly followed along with this livestream. It all went pretty smoothly, but wing airframes are much less spacious than I am used to on quads. A couple of things to note:
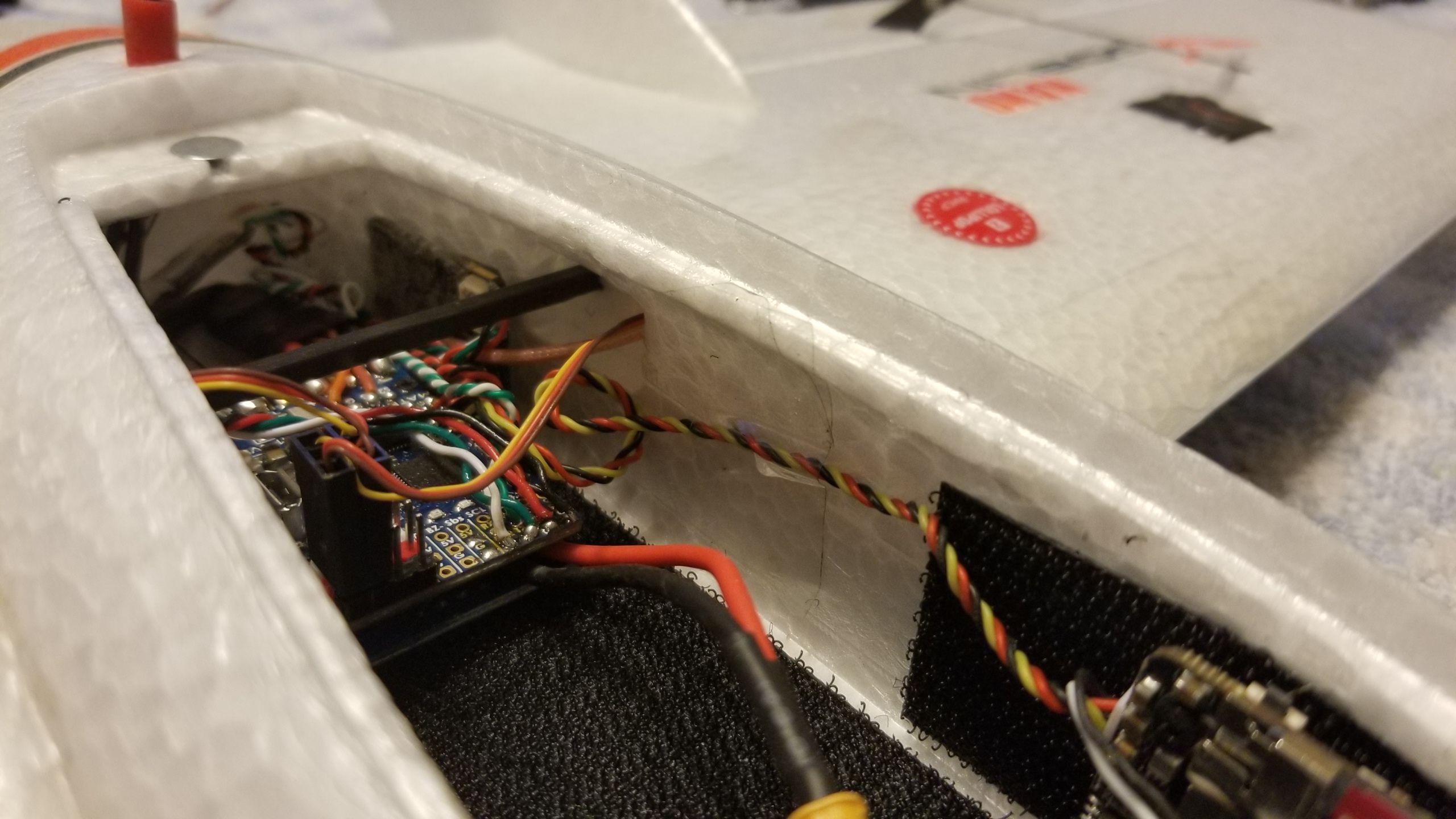
- I am using a Crossfire Nano rx with the stock antennas. The rx is mounted within the fuselage, the wire routed through the wiring channel out onto the right wing. I cut down through the foam to the carbon fibre main spar, and wrapped a zip tie around it to support one pole of the antenna. The other lies flat along the wing. I filled the ugly hole I made with foam glue.
- The VTX is also mounted within the fuselage. It is pretty far back, but I am not too concerned about temperature because the canopy of the aircraft has a decent scoop to increase airflow. The video antenna passes through a small hole and is then attached with double sided tape.
- The GPS module is way out on the underside of the left wing. I cut a small bay for it such that the cables go directly into the wiring channel.
- I made the battery pack myself from two 18650 3000mAh cells.
How it flies
...Not brilliantly. Yet. You can see the maiden here and the second flight here . I have actually followed the fixed wing setup guide on the iNav wiki now (after those first two flights), but have been waiting for good weather before I go flying again. I am very confident in the position of the CoG, but not much else. Any advice welcome!
Flight Update:
Third flight was magnificent. iNav Launch Mode is a thing of beauty. For those of you that don't know, you configure launch mode, arm the plane, set the desired throttle for launch on your tx (but the prop doesn't start spinning) then throw the plane into the air. When the FC detects the acceleration, it waits for a set time (0.5s) then kicks in the throttle. Will level the wings and climb at a preset angle (20 degrees ish). It will give you control back as soon as you touch the pitch/roll stick. I still need to further calibrate the board orientation in iNav to get level flight, and possibly add a touch more reflex. I also noticed a nose-bobbing behaviour at about 30% throttle - some PID (PIFF?) tuning required there.
..And I still don't know how to land. Went around to come in and parked it in a tree. I did ramp up the throttle to try and climb, but just hit the tree harder :)
Photos













Part List
Show stores (4)
Is your GPS working? I have the same one and it says "this side up" on the opposite side you have showing

Hello, Great build!!! Curious why you bought 4 cobra motors? Also, im thinking of getting a NG, how easy is it to fly for a someone completely new to flying?

Short answer: I didn‘t.
Rotorbuilds is most commonly used for sharing multicopter builds, and normally quadcopters. It adds 4 motors by default, I just didn’t notice!
What do you mean by new to flying? New to fixed wings, new to multis, new altogether?
I had never had a successful flight witha fixed wing before this, so yep, its great.
If you havent flown anything before, I would reccommend getting some stick time in on a simulator first, preferably with a real transmitter. Same goes for if you want to fly multis or fixed wing

Very nice build I just built on myself recently. pretty much all the exact same parts other than VTX antenna. it's the closest thing to Flying a mini quad that's a plank lol

quick question what firmware are you using on your flight controller? are you on 2.0? I was wondering if maybe I can get some help from you. or a dump of your configuration from the CLI? now to go watch your videos and subscribe to your Channel ðŸ˜
yes an email address would make it a lot easier. my email address is bay.area.heli@gmail.com I would love to know what configurator your on and firmware. that way I can load it on my plane and try your CLI dump and see if I have better success than I am now I haven't been able to fly other than manual mode and even then it's not flying that well. I'm so new to inav I come from raceflight and flightone inav seems more like betaflight so I'm completely lost. it's such an awesome bird I just want to get it trimmed out and flying with inav being able to use my return to home and auto-launch. but yeah if you can help me with anything like that and I would be awesome and thanks for your prompt reply. look forward you putting more videos on your Channel. you can check out mine it's farmer fpv I have quite a bit of freestyle stuff on there. thanks again
cheers from Northern California
Rob

all up weight? 249g right? :)

Build looks awesome, as far as landing is concerned i wouldnt fuck around with inav doing it, just do it manually. Simply come in towards where you want to land whislt flying into the wind, when you are at about 100 yards depending on how well the plane glides cut the throttle or lower it to almost zero, then just push the nose down so that you hit the ground at the right time. When you are a few feet off the ground simply pull the nose up to slow down even more and land with the belly first. If you come out short simply add some throttle and if you overshoot make a loop, get another nice approach and try again.

Does iNav allow for 'autopilot'? What is the extent of its in-flight guidance for the pilot?
iNav has heaps of great features. This page gives a good overview of all of the flight modes: https://github.com/iNavFlight/inav/wiki/Flight-modes
If you don't want to read that. Yes, iNav allows for completely autonomous flight for waypoint missions, can land itself, not sure about takeoff. It behaves slighlty differently for quads vs fixed wings.









thanks for sharing. I'm planning to build nano goblin with pretty much the same components, are you definitelly positivive you got it under 250g with the FC, VTx & 18650 2S battery pack ?