NF1: Neuroflight Test Aircraft 1
 By flowwithchaos on Nov 17, 2018
By flowwithchaos on Nov 17, 2018
This quadcopter has been built for the development of the first neural network powered flight control firmware, Neuroflight. Our research is focused on developing next generation flight control systems. Neuroflight is built by training a neural network using reinforcement learning offline in simulation using a modified version of GymFC. The modifications we made are neccessary to be able to transfer the neural network to hardware and be flown in the real world.This work is currently under review so please check back to get updates on the tech report, videos and source code.
The motivation with this build was to select parts that provided the most sensor data as possible available in off the self parts to aid in training our neural network in the future. For this reason the new 32-bit Bheli ESC was selected to provide ESC telemetry. Furthermore we selected an F7 microcontroller to have the additional flash space and faster clock to support running a neural network in real time. I love the Matek stack, which has been used in another one of my builds. I find the Matek VTX much more reliable than the TBS unify which I have had to replace numerous of. The Matek VTX PCB includes mounting holes allowing you to add it to your stack for a cleaner build.
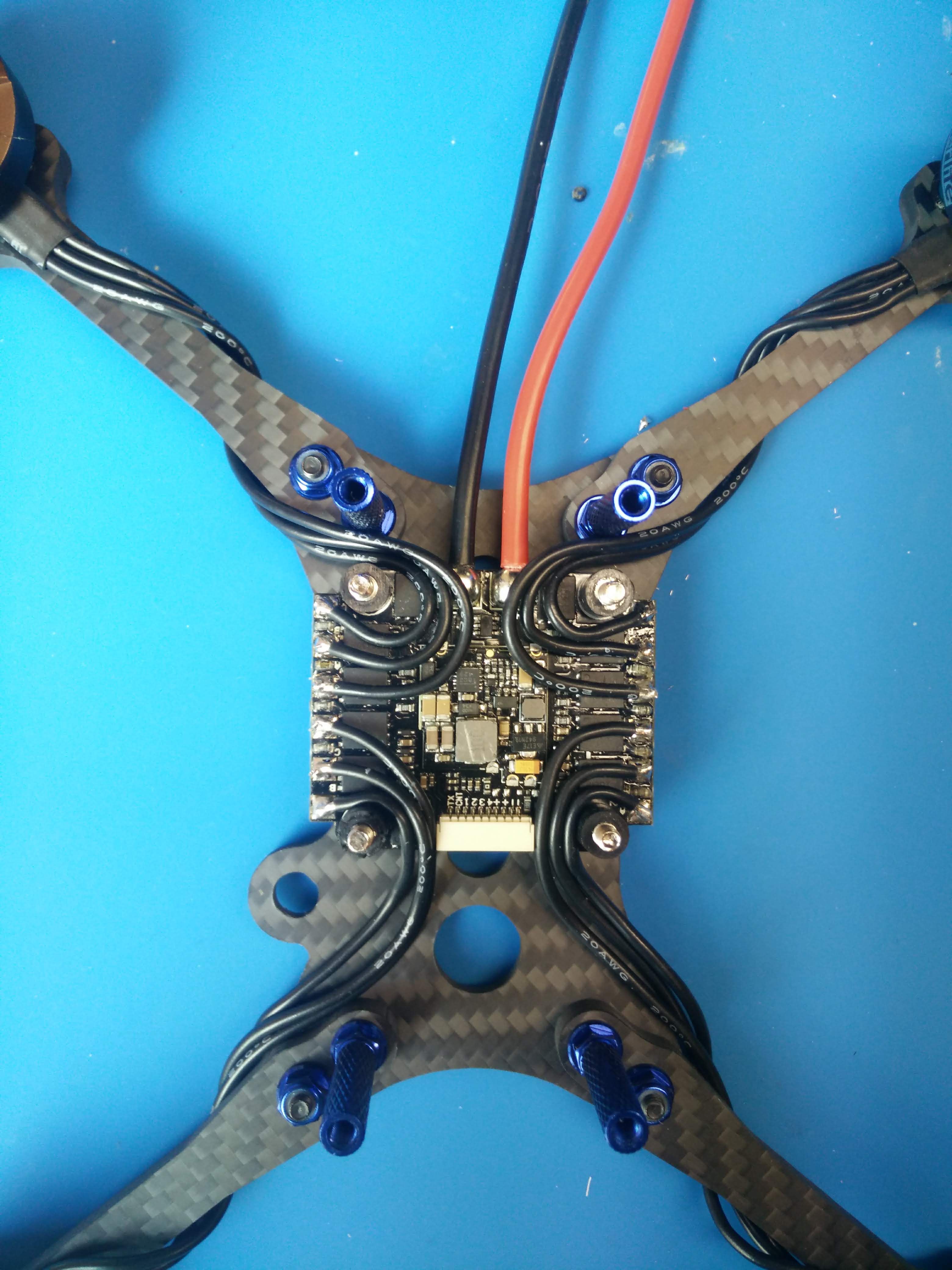
The orinally plan was to use race wire so we would have easier access replacing motors during research however the arms were shorter than expected and in the end it didn't make much sense given the hassel. Luckily the motor wires were flexible enough to just wrap under the arm to aviod prop strick. Since we are using an MMCX connector for the antenna, the SMA support on the base plate of the frame was available which was used to hold the battery. I was skeptical about using the camera mounts provided by the floss 2 frame given how flimsy they were however they have held up quite well, I'm extremely suprised. I love this build so much, its clean, easy to repair, extremely durable and has all of the features you would want (ESC telemetry, camera control, Smart Audio, telemetry, OSD, etc).
There are a couple improvements I'd like to make though. The buzzer needs to be secured better (currenly done with double sided Gorilla tape), it has popped off. The antenna, although extermely durable, is poorly positioned for providing the best video quality. There is too much obstruction from the frame. Running at power > 25mW helps if you are flying around trees however there would be much improvement if an SMA antenna was used and positioned away from the frame. I might try and experiement with using the SMA mount on the frame, with this build I'm not concered with adding some additional weight. Also I want to try adding a cap to see if it will help clean up the video signal.
Photos


Part List
Show stores (3)
I'm interested in your neural sensing hardware, is this a cool concept. Do you HAVE any hardware for a neural interface?


Guides & Reviews

AirbladeUAV has done it again and this time they've brought long range to the 5" class! Based on the popular Transformer Mini, the new Transformer 5" Ultralight adopts a lot of the same design philosophies with larger props and more payload capacity. It can fly upwards of 20 minutes on a 4 cell Li-Ion battery pack and in ideal conditions it's got a range of over 4 to 5 miles. In this guide I'll walk..
Read more
With the release of the DJI FPV Drone cinematic FPV has become a lot more accessible, but you certainly don't want to crash a $750 drone! The QAV-CINE Freybott is a compact, lightweight cinematic FPV drone that can take a hit and keep going. It's a lot safer to fly indoors and around people. With a naked GoPro or the SMO 4k you can capture some great stabilized footage. In this guide I'll show you..
Read more







framed