
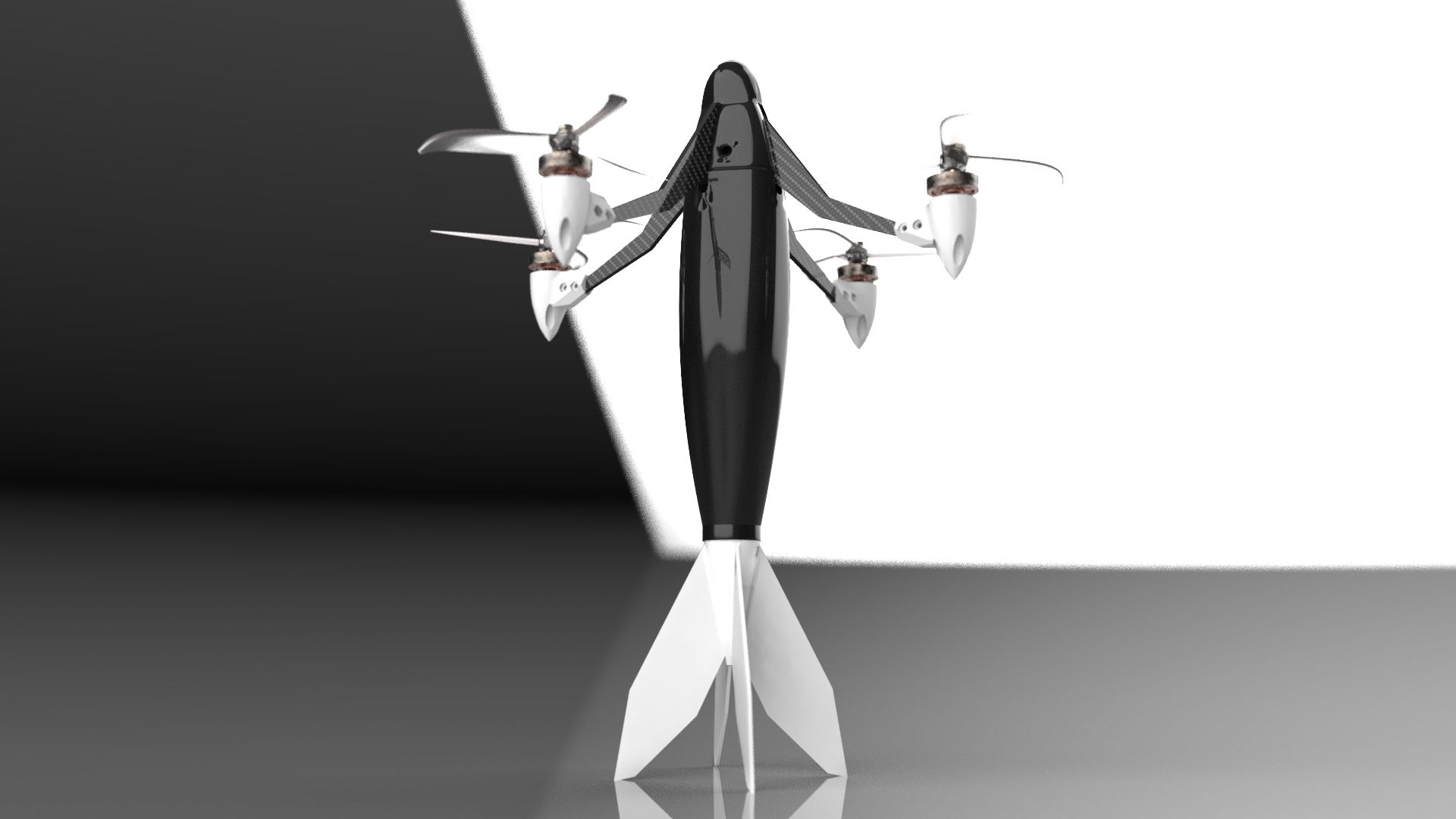
Attempt to go really fast.
Unfortunetly didn't worked as planned.
V2 coming soon.
Photos














Part List
Show stores (5)



Guides & Reviews

AirbladeUAV has done it again and this time they've brought long range to the 5" class! Based on the popular Transformer Mini, the new Transformer 5" Ultralight adopts a lot of the same design philosophies with larger props and more payload capacity. It can fly upwards of 20 minutes on a 4 cell Li-Ion battery pack and in ideal conditions it's got a range of over 4 to 5 miles. In this guide I'll walk..
Read more
With the release of the DJI FPV Drone cinematic FPV has become a lot more accessible, but you certainly don't want to crash a $750 drone! The QAV-CINE Freybott is a compact, lightweight cinematic FPV drone that can take a hit and keep going. It's a lot safer to fly indoors and around people. With a naked GoPro or the SMO 4k you can capture some great stabilized footage. In this guide I'll show you..
Read more







So much drag. I suggest moving prop line to CoG
Props are very close to CoG line already - which in itself is not an advantage for drag reduction.
Why do you think there's much drag in the vehicle?
If the CoG is in line with the props why do you need the tail or stabilizers in the rear? And the tail is why I said my original comment.
CoG on the prop line is does not make the vehicle stable.
It needs the tail to push the Center of Pressure back, so the vehicle is stable at high speeds.
I rather use the tail and increase slightly the vehicle drag than not use and depend on differential thrust to keep it stable.
Have a look at this: https://www.spacecad.com/posts/model-rocket-stability-prediction/
Are you conflating how fixed wings, rockets, and quads fly? Fix wings need to have the CoG and CoP distanced to some degree relative to speed, yes. Rockets, do as well as far as I know but only because the thrust vector should intersect the CoG for stability (unless you are using fly by wire). But quads... quads are different because the combined thrust vector is constantly changing per the control loop and as a result doesn't even have a textbook center of pressure because of the 4 control sources (motors). I would just think that by adding the tail you are decreasing your thrust to weight ratio and increasing parasitic drag by adding more surface area. But again - I am merely a quad nerd behind a keyboard and this is merely a cool, and thought provoking project that I want to unfold.
Yeah, this vehicle is a bit different from pure quads, it relies on passive stabilization from the fins to gather the maximum motor performance.
Rockets can either use passive stabilizers (such as fins) to push the CoP aft or active ones (such as thrust vectoring you mentioned) to keep the stability by constantly correcting the errors as they appear.
Pure quads uses the motor differential thrust to keep everything stable. Because there are always very minor errors all the time, the quad almost never will go 100% thrust on all 4 motors, it needs to reduce some of them to keep the quad stable.
My idea with this vehicle was to relieve a little bit the 4 motors from the stabilization process. By having the fin there, they vehicle becomes passively stable, and therefore with some changes to the PID values and some other configuration, I can use more motor power for overcome the drag and go faster.
Let's think without the fins: if some control needs to be applied to the quad some of the motors would slow down to create the differential thrust - decreasing overall thrust.
Now with the fins: if the craft starts do deviate from the intended attitude the fins will take care of that passively. All the motors can, in theory, still be 100% and the vehicle will still be stable.
Yes they will increase drag but the gains from the extra motor thrust can overcome that.
Interesting concept - although I am still not convinced the fins are necessary because of the fundamental control mechanisms in quadcopters control firmware, but how are you managing the decrease in effectiveness of the tail fins in turbulent air from the props?