
Overview
The aim of this build is to have something durable to throw around a playground or a backyard.
After experimenting with fully 3D printed frames I finally gave up, dissatisfied with durability and stiffness no mater how hard I've tried and materials used. This nice reinforced carbon fiber frame shall do instead.
Split stack design lets you put FC and 4-in-1 ESC in the middle, VTX and RX are in the back and camera in the front. This gives nicely balanced quad.
The original frame is high, no need that much space. I'd rather lower the top plate and put the battery up there and letting the front cage shield it from nasty full-speed upfront collisions.
3D printed inserts hold battery and main battery connector in place. The rear block secures balance lead and saves it from prop strikes. The balance lead powers everything onboard but ESCs and motors. The front carbon fiber cage is a bit small for my camera, so some protectors were designed to save lenses from unfortunate head-first crashes.
The arm shields were also added later, since carbon fiber plate have started cracking around motors after several hard crashes.
Everything red and plastic was 3D printed.
Do not miss that 3-wire micro connectors between ESCs and motors! They are awesome, weight close to nothing and let you quickly swap motors if any of them damages. Also easy to change motor directions and helps debug esc-motor problems, just swapping motors around helps you see if motor is indeed dead or you have some misconfiguration.
Flying characteristics
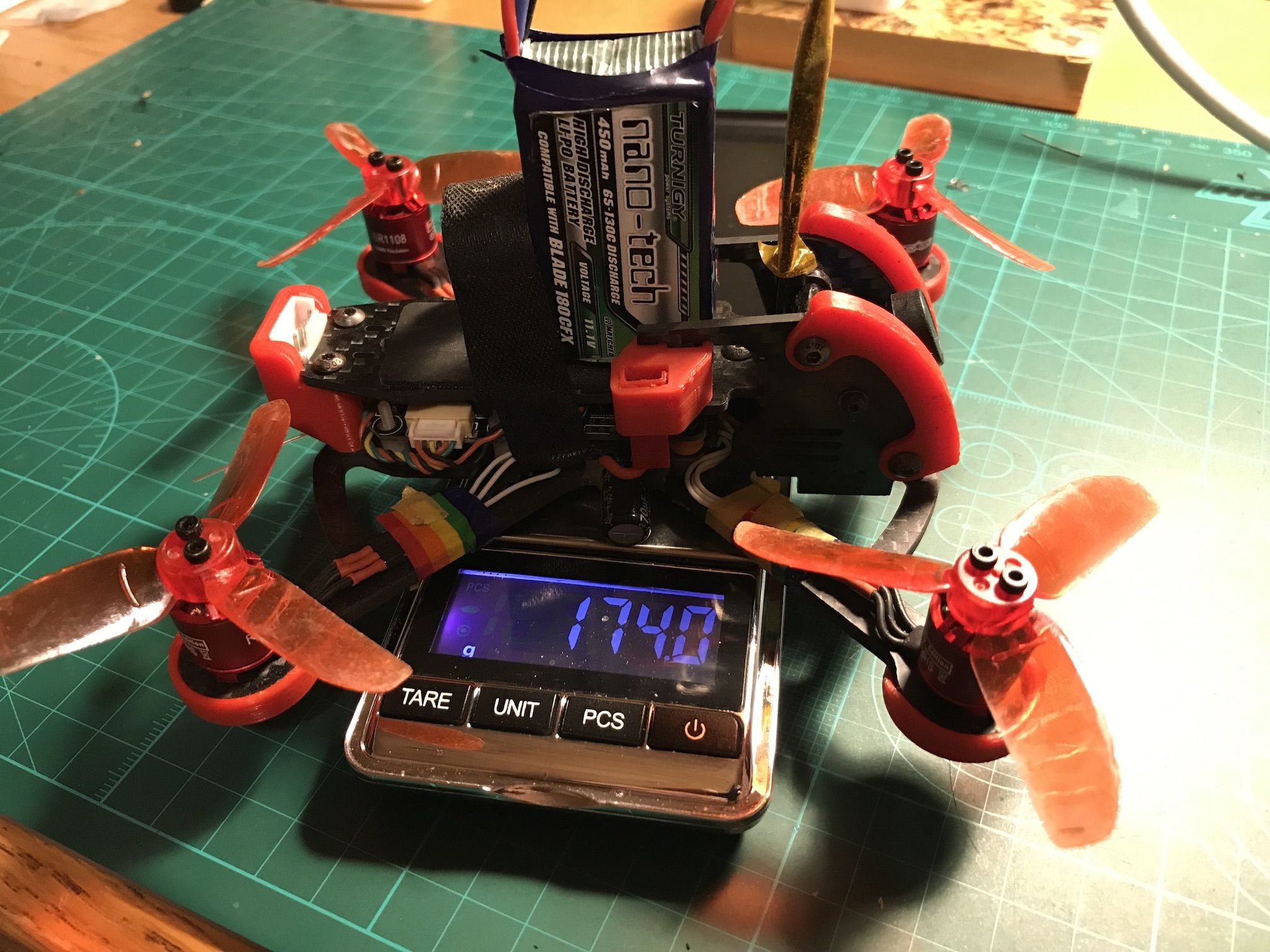
Thrust-to-weight ratio is at least 4:1, these motors (according to table on Banggood) can pull 220g on 3S and 3020 props. I use 2840 tri-blades and that shall in theory give more thrust. Being conservative, we can say 200g per motor, or 800g total and weight of the drone with battery is 174g.
Flight time is usually 3-4 minutes, depending on how hard I am on the sticks.
Possible future improvements
- Motors. I am not happy about these 1108 4000kv. One of them just broke a bearing and two other have developed vertical slop.
- Battery. In theory, this guy shall be happy flying with 850mah 3S battery (~80g). Just need to find one with high C and 20mm thick so it fits in between front cage plates.
- Battery main lead. Shall switch to XT30 from JST, later.
Photos












New Message for ysoldak