
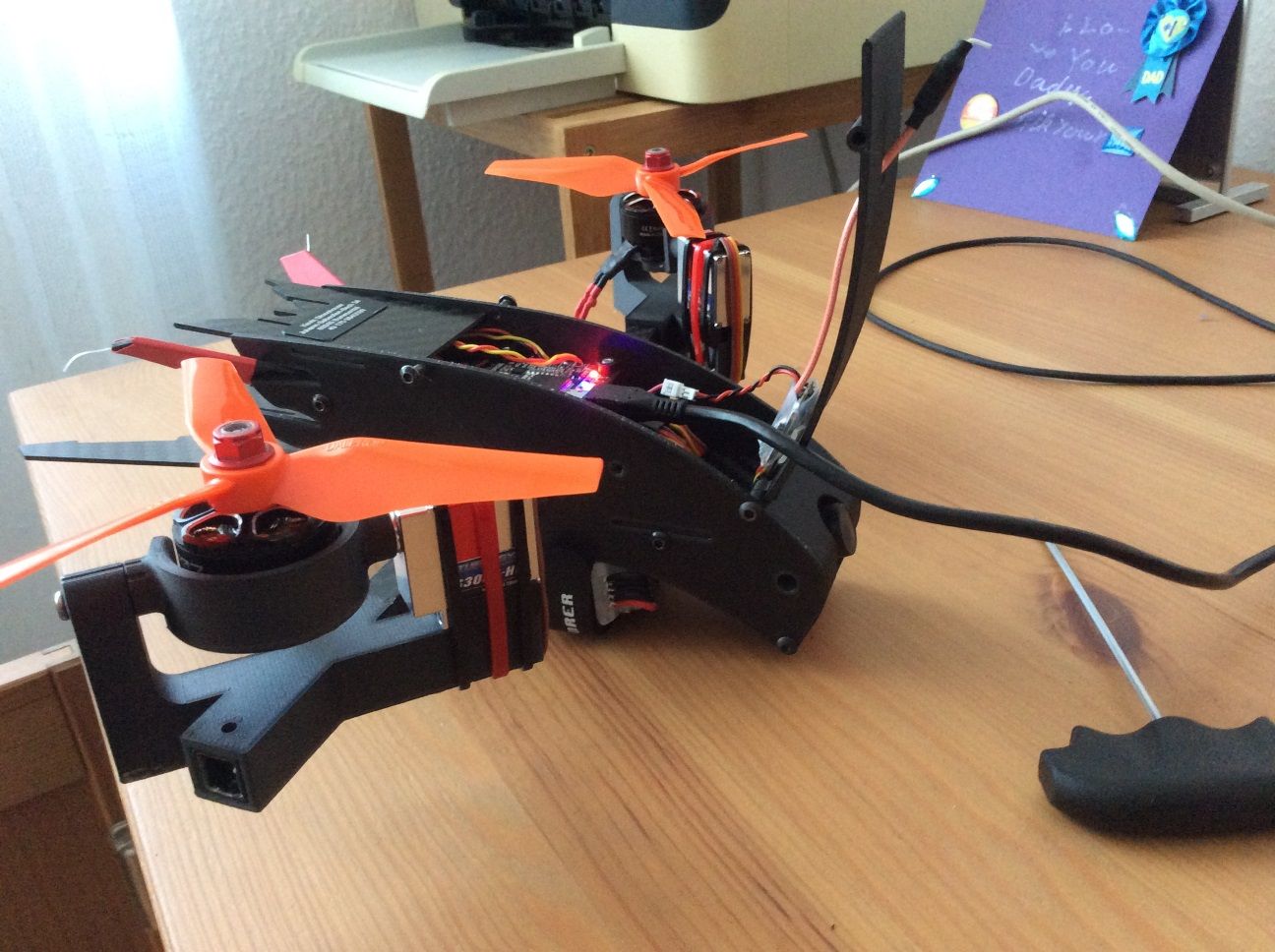
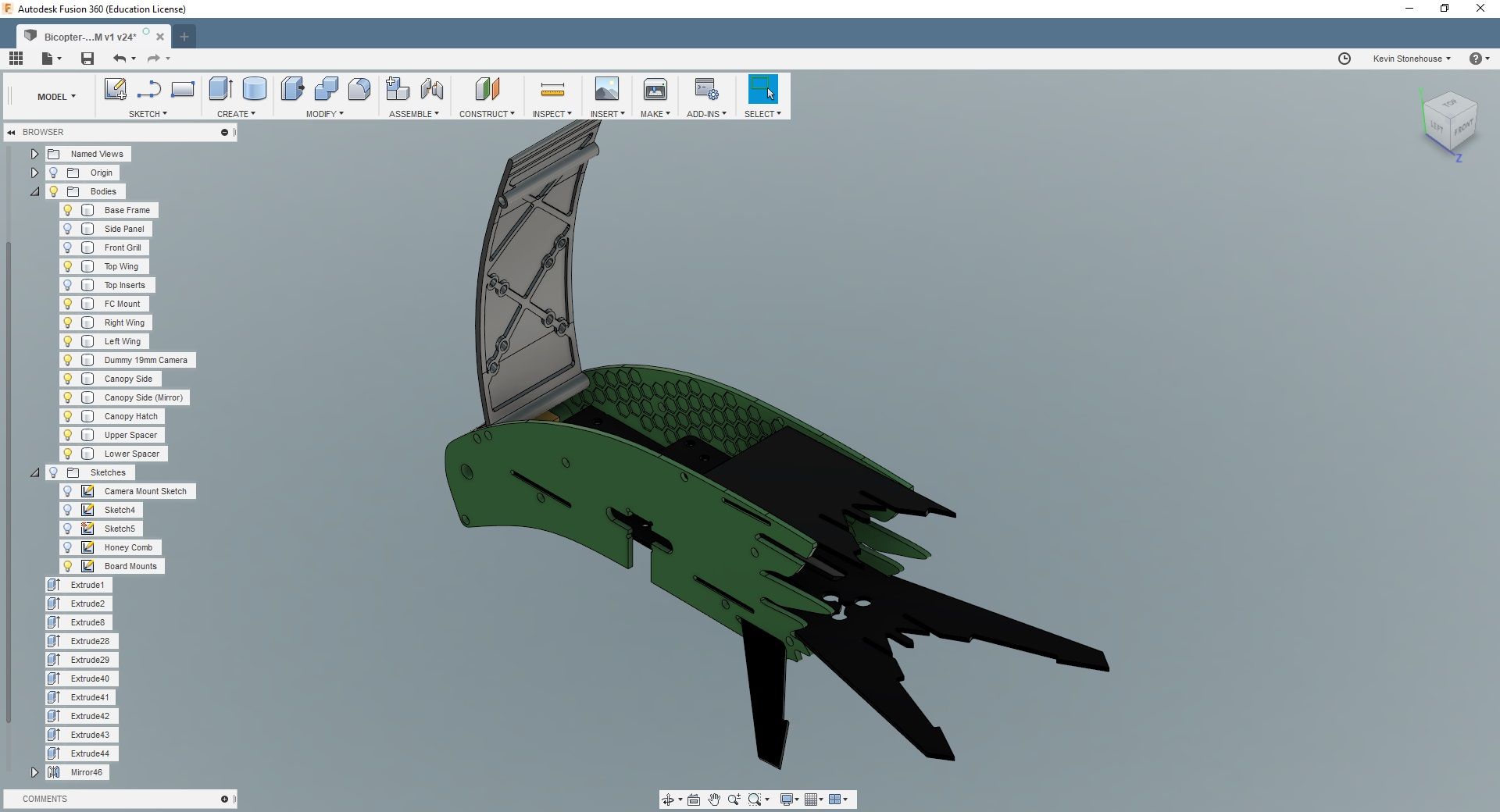
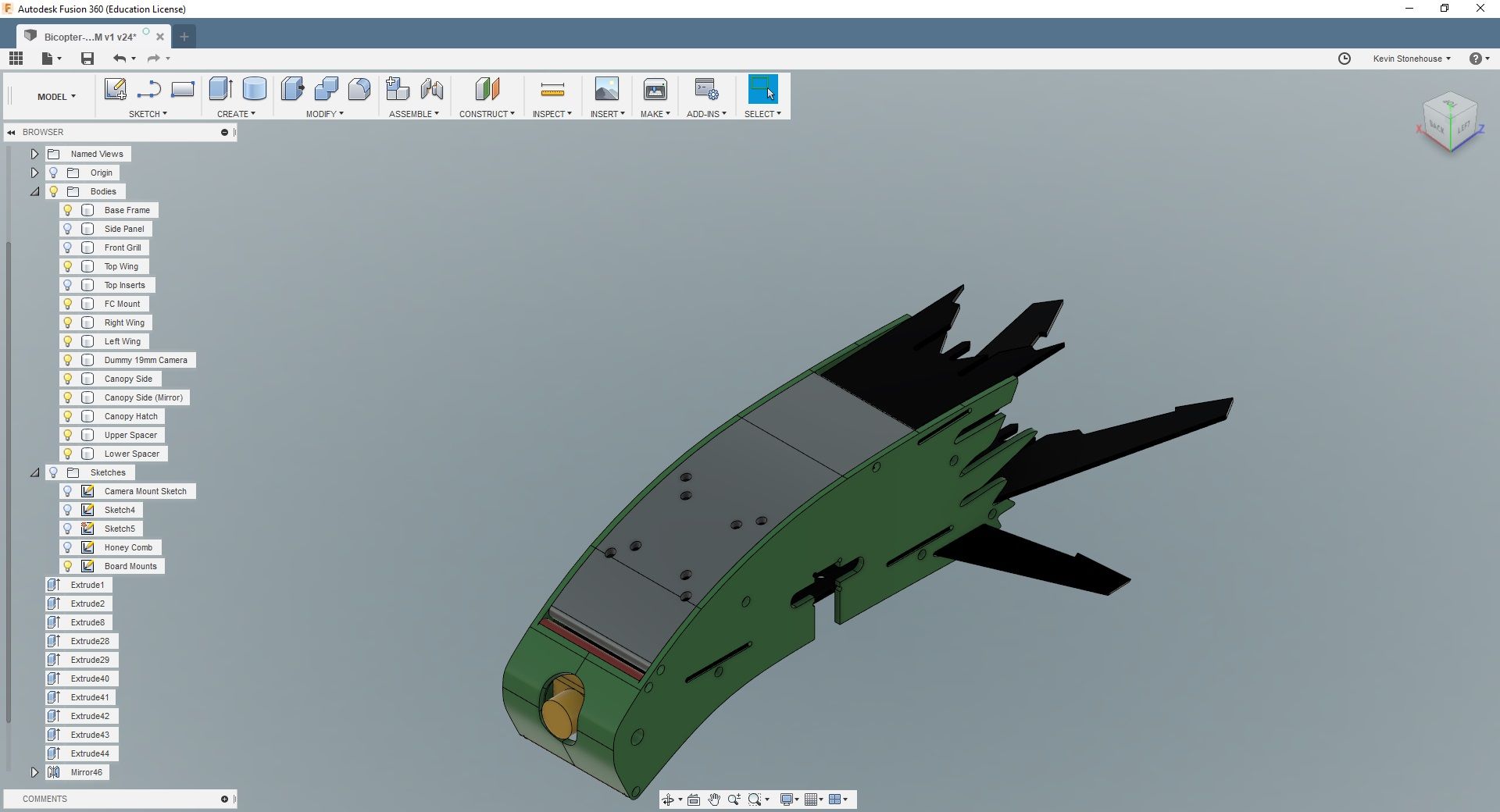
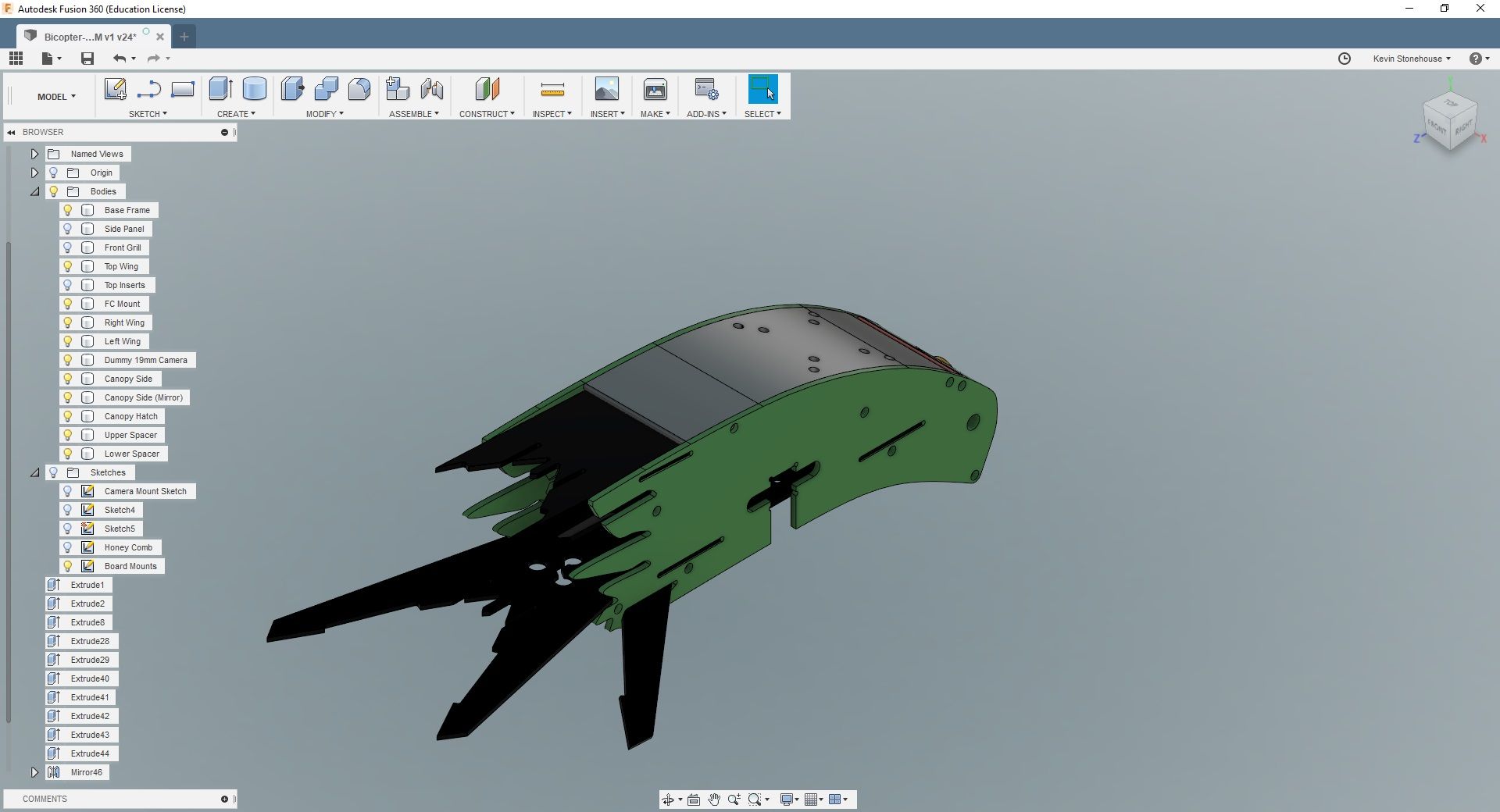
This is a revamp of my original Bicopter canopy design. Allowing the camera mount to be removed independently of the frame as well as having a much better door / hatch to access the electronics.
See thingiverse Link for Details: https://www.thingiverse.com/thing:3571841
Flight Video:
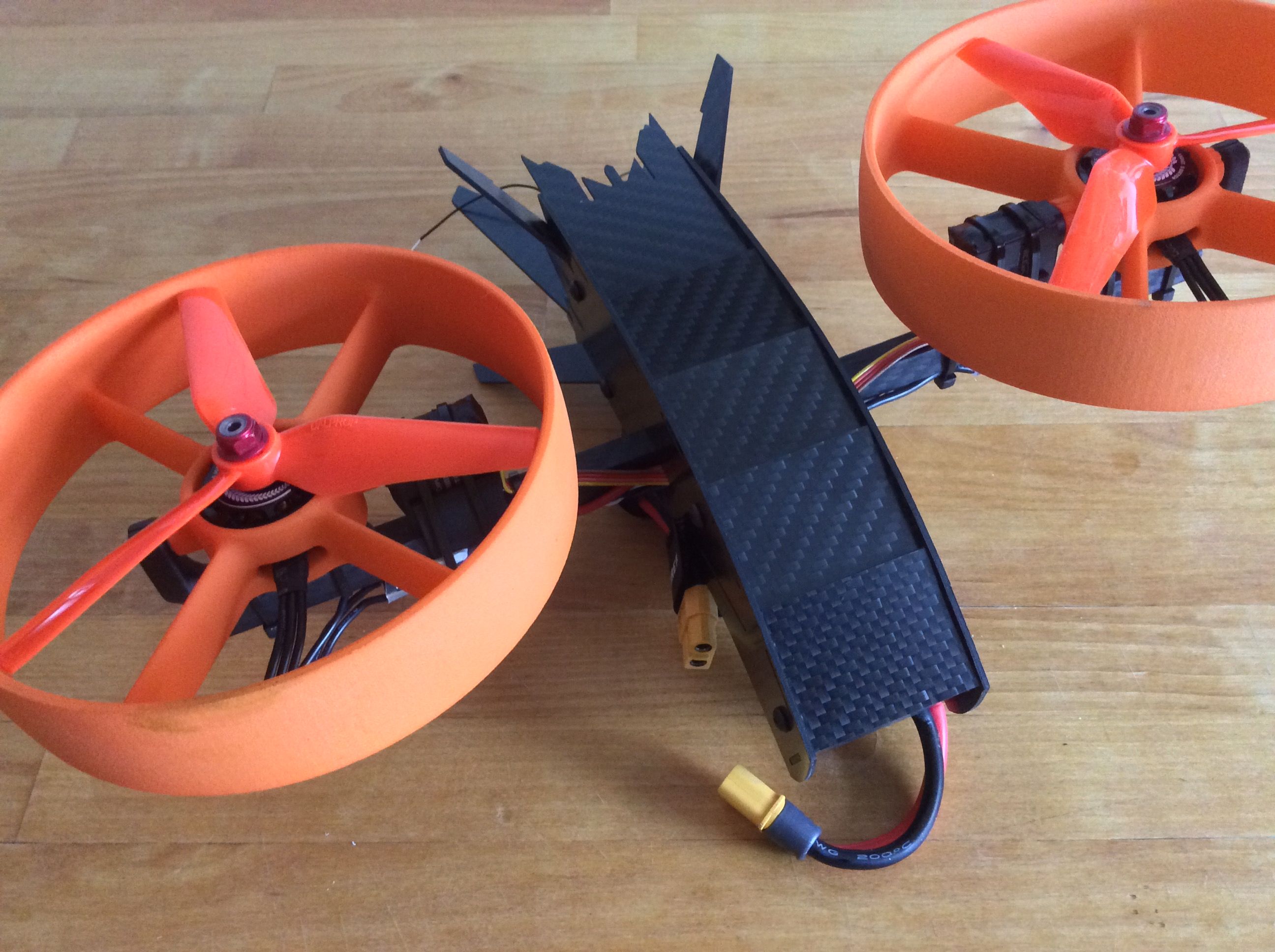
Photos



Part List
Frame |
Menu
Rcexplorer.se
|
$117.00 |
Flight Controller |
MATEKSYS F405-STD Flight Controller
Getfpv.com
|
See Site |
ESCs |
Aikon AK32PIN 20x20 4-in-1 35A 6S BLHeli32 ESC
(4 builds)
Getfpv.com
|
$59.99 |
Motors |
2 x EMAX RS2205/ 2300Kv RaceSpec Motor (CW)
(86 builds)
Getfpv.com
|
$33.98 |
Propellers |
DAL T5045 BN Tri-Blade Bullnose
(11 builds)
Dalprops.com
|
$1.49 |
FPV Camera |
RunCam Swift Micro V2 2.1 FPV Kamera OSD
(282 builds)
N-factory.de
|
See Site |
FPV Transmitter |
RunCam TX200U
(3 builds)
Shop.runcam.com
|
$14.99 |
Receiver |
R-XSR Receiver
(6 builds)
Rotorriot.com
|
$19.99 |
Batteries |
Tattu 850mAh 14.8V 75C 4S1P Lipo Battery Pack (XT30)
(35 builds)
Getfpv.com
|
$18.86 |
Power Distribution |
n-Factory.de
N-factory.de
|
See Site |
Hardware |
2 x Menu
(4 builds)
Rcexplorer.se
|
$54.00 |
Hardware |
Impossible Duct & Mechanism V2 by 1Smug_Bastard
Thingiverse.com
|
See Site |

That canopy design looks :)
also have people tried a mix of a sideways bicopter with fpv? like an fpv chinook type thing, that would be awesome if it's feasible, imagine just one carbon tube for a whole frame, a 10g indestructible 5 inch frame!

The Chinook style of copter is doable true. Though i think you'd run into two issues.
1st, your Pitch contol is based solely on the ability of the props to throttle up / down. With a side-ways mounting the props will be cutting thru each others wash creating instability at high angles of attack. While its possible to build for this by offsetting the motors (higher / lower) you'll still need to tune the build around the problem to prevent oscillations.
2nd, Roll and Yaw will be strongly linked together making this difficult to tune for. Example, the copter will Roll away from the direction of Yaw, unless you use "mostly" the front Servo to control Yaw. (60 front / 40 rear, split) This will then allow the copter to Roll with Yaw, making the turns look and feel more natural.
Other then that, so long as you can keep your CG really low, it should prove to be very stable in forward flight.

Put a bit of liquid tape over that microphone and the audio will get much better


This is so damn cool! I love it👍 Love all your vids! You are a great innovator and a real asset to our hobby! Keep the cool crafts coming! Thank you!
Guides & Reviews

AirbladeUAV has done it again and this time they've brought long range to the 5" class! Based on the popular Transformer Mini, the new Transformer 5" Ultralight adopts a lot of the same design philosophies with larger props and more payload capacity. It can fly upwards of 20 minutes on a 4 cell Li-Ion battery pack and in ideal conditions it's got a range of over 4 to 5 miles. In this guide I'll walk..
Read more
With the release of the DJI FPV Drone cinematic FPV has become a lot more accessible, but you certainly don't want to crash a $750 drone! The QAV-CINE Freybott is a compact, lightweight cinematic FPV drone that can take a hit and keep going. It's a lot safer to fly indoors and around people. With a naked GoPro or the SMO 4k you can capture some great stabilized footage. In this guide I'll show you..
Read more







Wow! I think the canopy is an obvious must. When I watched Dave put this together I was cringing at the idea of taking that batman lookin multiplate canopy apart, and reassembling it just to get to your FC to make changes. Bravo. I am super curious about that angle you added to the servo mounts, what does that do?
Yeah that was my reasoning behind making the canopy. Even wiring the Copter up for the first time was painful, simply because the side plates kept getting in the way. I added the camera mount as no one else was doing it and though it would be cool to have this feature.
To answer your question, the Servo mounts are using a technique called sOat.
Thingiverse Linkhttps://www.thingiverse.com/thing:3098210
Forum on subject: https://rcexplorer.se/forums/topic/rce-bicopter-with-soat-control/
In a nutshell, Bicopters are inherently unstable creatures. Thus, requiring subtle changes to the Copters CG by way of the Servos shifting forward and back. It's like balancing on a knifes edge while in flight!
Example: You push the Pitch stick forward forcing the Servos to rotate forward. Not only is the thrust now vectored rearward, at this point but the CG is moving forward too. This allows the entire frame to Pitch forward, while increasing the Copters speed. Once the desired position has been reached, the Servo's move back to a neutral position, stabilizing flight. (while the rest of the copter remains tilted forward) Now returning to level flight, requires that the Servos move past the copters CG centerline again. Effectively reversing the above procedure. However, with sOat, the Servos are mounted at a 45-degree oblique angles. The general idea being that the propellers gyroscopic torque is now being applied allowing for both greater control and some dampening effects. The larger the propeller the greater the effect etc. I really liked using HQ 6x4.5x2 as the performance and flight time was excellent.
A few things of note...
-While David's Baby-PDB is really good, I prefer the Matek FCHUB-W as it has a wide range of Servo voltages that are selectable. (3A output too) Three Servo header connectors, that allows the Servos to be quick connected / disconnected. This alone makes the build so much easier to do.
-Tuning this beast was really hard, even with dRonin’s auto-tune. There are times it would oscillate in reverse flight or when strong winds came from behind. To tame this, required setting the Yaw PID's as low as possible (10 to 15) while still getting the desired Yaw / Turn rate from it. Furthermore, never add D-Term to a Yaw Servo. They’re just not fast enough to manage and often can induce oscillations due to the added lag from D-Term. Case in point, most HV Servos are rated for 330Hz PWM, while a basic ESC can do 30Khz or faster.
-Beyond this, tune Pitch and Roll as you would a Quadcopter yet with a one caveat. Pitch much be the strongest as it’s the most critical to the stable flight of the craft. Roll and Yaw are linked together and induce the opposite vector when one or the other is applied. Hence Yawing your Copter will induce Roll, which will require counter Roll from either the Auto-Level mode or the pilot directly. This can quickly lead to a situation where Roll and Yaw form a feedback loop that leads into uncontrollable oscillations. This is why Yaw’s PID’s are Kept really low and why Roll should be kept moderately tuned with respect to Pitch.
-I have always wanted to add a mechanical Gyroscope to my Copter to Dampen things out more. The general idea being that the FPV camera wouldn’t be Pitched around so much and thus allow for a Quadcopter like FPV experience.
So the 45 degree angle to the mount makes the servos move less (with respect to the CG) as they are tilting the motors, making a more stable flight, am I understanding you here? It makes sense when I imagine it.
I'm not suprised that the servos are too slow to react for the smoothing effect that we want from our D term tuning.
I like the idea of using the gyroscopic procession created by the blades to torque the body of the copter, instead of relying on the servos/physical orientation. Seems like a lot to coordinate. Question: If torque from the rotor on the right (when viewed from above, diring foreward flight) pitches you foreward, doesn't the rotor on the other side produce an equal and opposite torque? Wouldn't you need another set of rotors to distribute the lifting force to be able to create the disparity in torque needed for that mechanism to be used here? I feel like speeding up the right rotor more than the left, to produce foreward pitch, would also roll you left, creating a left/foreward summersault spiral.
1st point – Correct!
2nd point - Both motors / props need to move forward or backwards together. Otherwise the craft will Roll / Yaw as a result. (sometimes this is desired though) Granted some of this can be compensated for by changing the motor speed to increase or decrease lift for either side. However, there's a point where the difference can be too great resulting in the nose dropping and the craft spinning wildly. It’s the "why" of Pitch being the strongest Term. Thus, the FC can level out the Pitch before Roll, restoring flight stability. Keep in mind that the FC has to manage everything that a quad does but with only two engines. Hence, we have to choose which is most important or risk the FC fighting itself while the copter plummets to the ground. Had this happen to me a few times, thank God for the auto leveling modes! Broke a carbon arm from this once but now that I know, i try to avoid this or set myself up for the turn in advance.
A prime example of this is adding a strong RC Yaw input during a high rate of forward flight. This will 100% result in a tumble if taken too far. The exact mechanics of this I ‘ve not spent much time researching. (yet) Though I currently believe that during a sharp Yaw, that the air moving over the flight-body maybe interrupted, causing a stall. It’s possible that by adding a tail surface (spoiler or alerion) may help here. It’s also equally plausible that by limiting the rate of Yaw to prevent this from occurring in the first place.
Example of spoiler...