2.5" 4s 1106 12a whoop board
 By matthew saigon on Sep 10, 2019
By matthew saigon on Sep 10, 2019
this is just an update to 2.5" 4s kind of builds.
these types of setups was popular 1-1.5 yrs ago, like babyhawk R 2.5" . still a great flier.
with a touch of modern stuffs ( whoop board, runcam nano )
whoop boards help keeping the profile very low and better flight characteristic.
i'm not a good pilot to take advantage of this build.
so if you want to know how it can really fly, just watch youtube videos from others.
similar quads are:
babyhawk R 2.5", skystars x120 Bolt, ( Nick Burns' favorite )
Ciotti fpv's 2.5" 4s 1304, Kabab's 2.5" 4s 1108 ( but keep KV low, around 4500kv. i don't know if 4s 5000kv works, you can try and let people know )
so look for those videos from them from last year or so and also from many other good pilots
so if these builds are still your favorite or if you're new and curious
then this build is great.
frame:
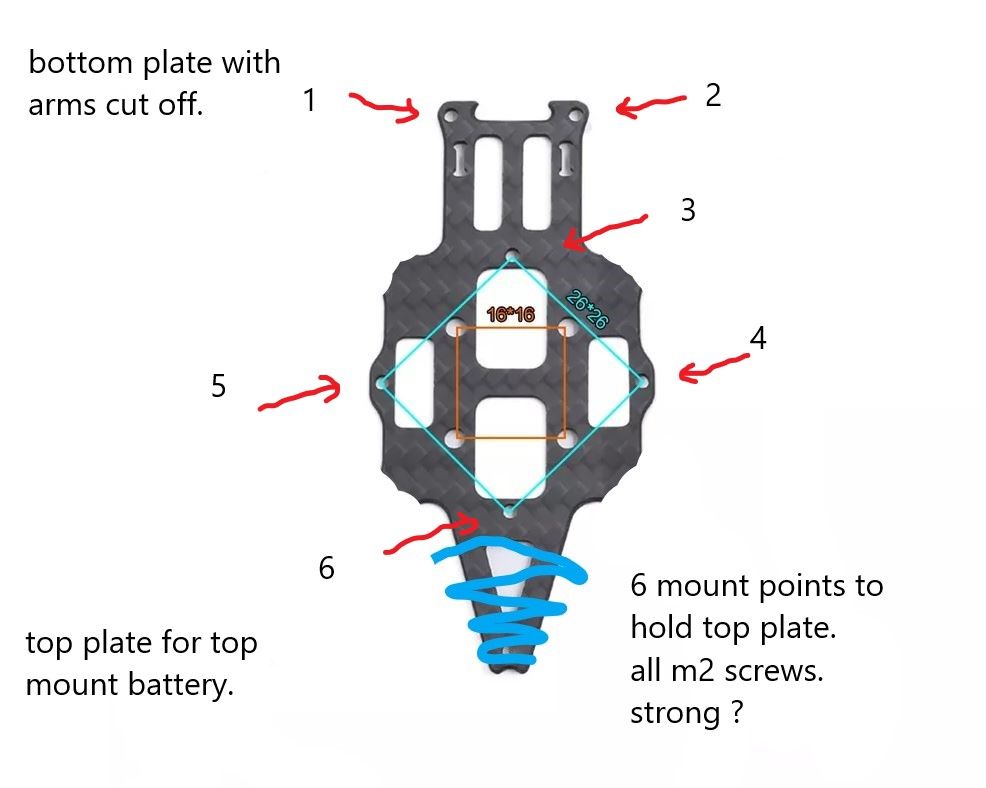
the reason for modifying the frame is the original top plate is too small and weak. ( or you could just use chopstick cs3 :) )
i'm using two bottom plates of Geprc Phantom frame. chopped arms off one frame and use it as top plate.
i trimmed around camera area to keep top plate as low as possible.
you might need camera mount. i got mine from a different frame ( chopstick cs3 frame )
weight: 83g dry
battery: Gnb 4s 520mah
i'm using skystars 1106 4500kv ( i can't find them anywhere, so no link for them )
Emax 1106 4500kv, should be the same.
Runcam nano 2
eachine nano vtx
Hq2.5x3.5x3
12a Geprc whoop board
xm+ receiver
PID is not good, but it's flyable. good starting point.
betaflight 4.0.6
i used betaflight community presets and changed PID a bit. https://github.com/betaflight/betaflight/wiki/Community-Presets
set gyro_lowpass_type = BiQUAD
set dyn_notch_min_hz = 150
set dyn_lpf_gyro_min_hz = 150
set dyn_lpf_gyro_max_hz = 700
set dyn_lpf_dterm_min_hz = 150
set dyn_lpf_dterm_max_hz = 250
set dterm_lowpass_type = BiQUAD
set dterm_lowpass2_hz = 150
set p_pitch = 27
set i_pitch = 85
set d_pitch = 28
set p_roll = 22
set i_roll = 78
set d_roll = 25
set d_min_pitch = 12
set d_min_roll = 10
set d_min_boost_gain = 30
set d_min_advance = 0
set pidsum_limit = 1000
set iterm_relax_type = GYRO
set iterm_relax_cutoff = 10
set tpa_rate = 50
set tpa_breakpoint = 1600
save
note: the battery ( Gnb 4s 520mah HV ) is a bit small. i think regular 550mah is better.
i'm not used to it. it has more control than my usual builds which are light, fast and floaty.
someone with more experience would appreciate this kind of builds more.
Photos







Part List
Frame |
GEPRC GEP-PT PHANTOM Frame Spare Part Bottom Plate/ Top Plate/ Side Plate/ 3D Printing/ Screw
(2 builds)
Banggood.com
|
$3.19 |
Flight Controller |
GEP-12A-F4 Flight Controller 12A ESC V1.1
(19 builds)
Pyrodrone.com
|
$29.99 |
Motors |
4X EMAX RS1106 4500KV Micro Brushless Motor CW Thread for RC FPV Racing Drone
(11 builds)
Banggood.com
|
$60.55 |
Propellers |
HQ Prop T2.5x3.5x3PC
(5 builds)
Pyrodrone.com
|
$1.60 |
FPV Camera |
RunCam Nano2
(184 builds)
Pyrodrone.com
|
$19.99 |
FPV Transmitter |
TBS Unify Pro32 Nano 5G8 V1.1 VTx Video Transmitter
(401 builds)
Pyrodrone.com
|
$37.99 |
Batteries |
Tattu 650mAh 4S1P 75C 14.8V Lipo Battery with XT30 Plug
(2 builds)
Amazon.com
|
$17.62 |
Batteries |
GAONENG GNB 4S 550mAh LiPo Battery 14.8v XT30 80C for Brushless 90mm to 130mm FPV Racing Drone
Amazon.com
|
$15.99 |
Batteries |
Gaoneng GNB 4S 520mah HV 80C XT30 Lipo Battery
(16 builds)
Pyrodrone.com
|
$12.99 |








Looks snappy
it is snappy. especially with 4s 450mah. it's for someone with more experience which i'm not. that's why i have a hard time controlling it :)
yeahh, that's why I like the larva x so far except the crappy canopy, but I crashed and killed 2 motors and happymodel uses stupid 3 hole proprietary mounting so I ordered a pickle toothpick frame and twig canopy and some geprc motors from tacoRC for it lol. I cant wait for motors to get here for a month or 2 from Banggood.
i feel like, if you like larva x then you wouldn't like this build. this one is for someone who don't like the floaty feel.
yeah, I mean idk what exactly I like yet either, but I think I do like it a tad floaty for sure is nice for freestyle