
Hi
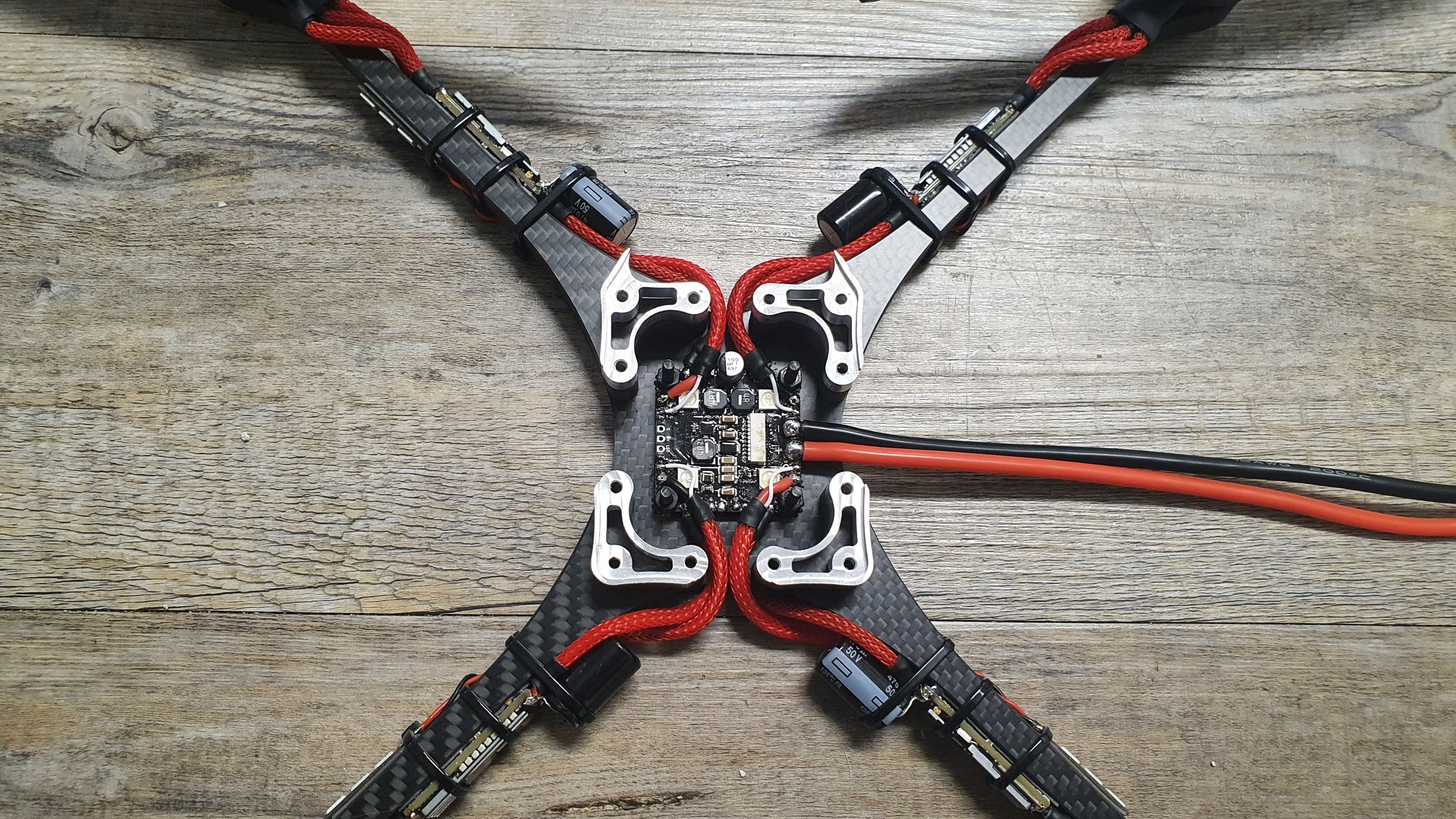
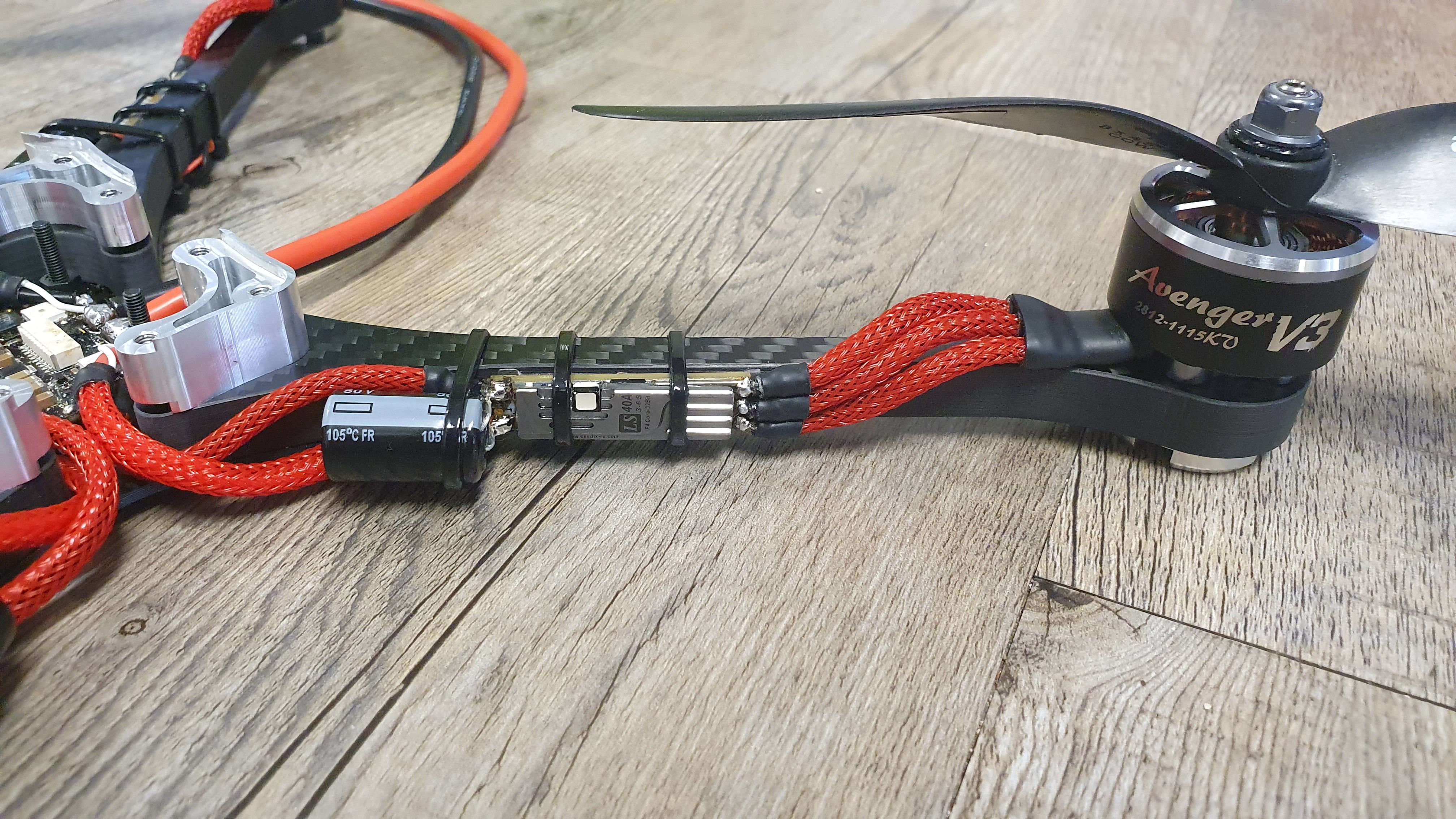
I want to show you my latest build. It's for fast longrange and mountain surfing. Dry weight is 832g. It's not the lightest but I think it's okay with the brotherhobby 2812 1115KV avenger V3. With this quad I want to break my personal record of 8km. Goal is the new dji fpv limit of about 12km. But normally I will use it for mountain and cloud surfing. Every component is covered with silicone conformal coating. So it's no problem to fly it under wet conditions.
Updates:
-
25.07.2020
Maiden
The aeronauts Propeller explode during a punchout. Quad fell about 8m from the sky. Weak spot is the alu cam mount. It's bent and my 6S 4000mah lipo is dead. The 10mm arms are very stiff and the rest is not damaged. I'll switch to the HQ MQ 8X4,5X3.
-
27.07.2020
Contact rebel and waiting for replacement -
28.07.2020
Antenna upgrade
 Today I received my mew costom made double quad vtx antenna from www.antennenfreund.de.
Today I received my mew costom made double quad vtx antenna from www.antennenfreund.de.
It has 2.32 dbic gain and I love the performance and optic of his handmade antenna from Germany. With this antenna I reached my personal record of 8km. -
04.08.2020
Today I received my spare parts. Next try tomorow :)
-
12.08.2020
I couldn't get a good tune with 8" props so I switched back to Dalprop T7056C -
11.09.2020
New personal record with my Yeti
11km Back and forth. For max range flights I switched back to 8" Bi-Blades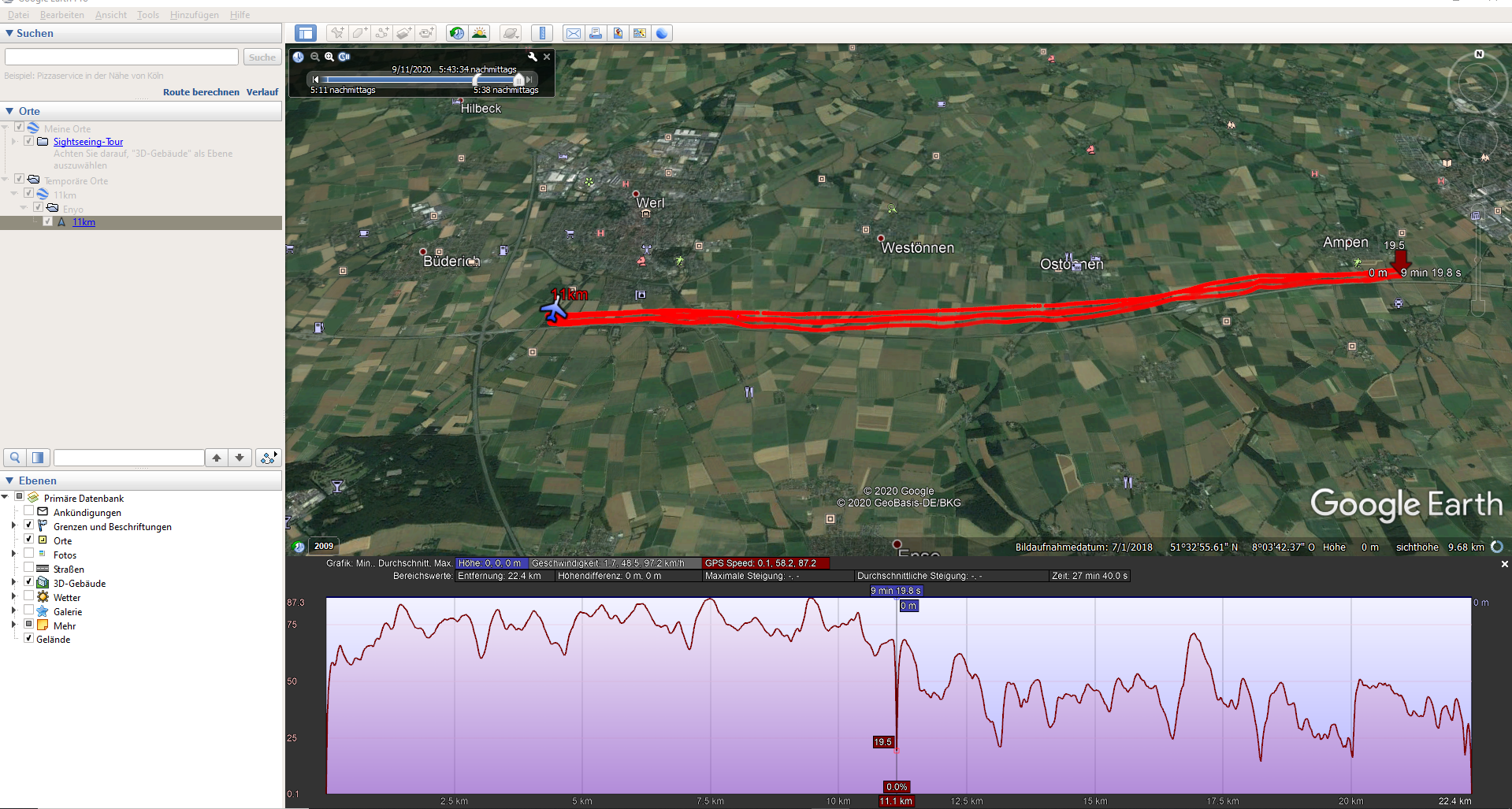
setup on my goggle
-
20.09.2020
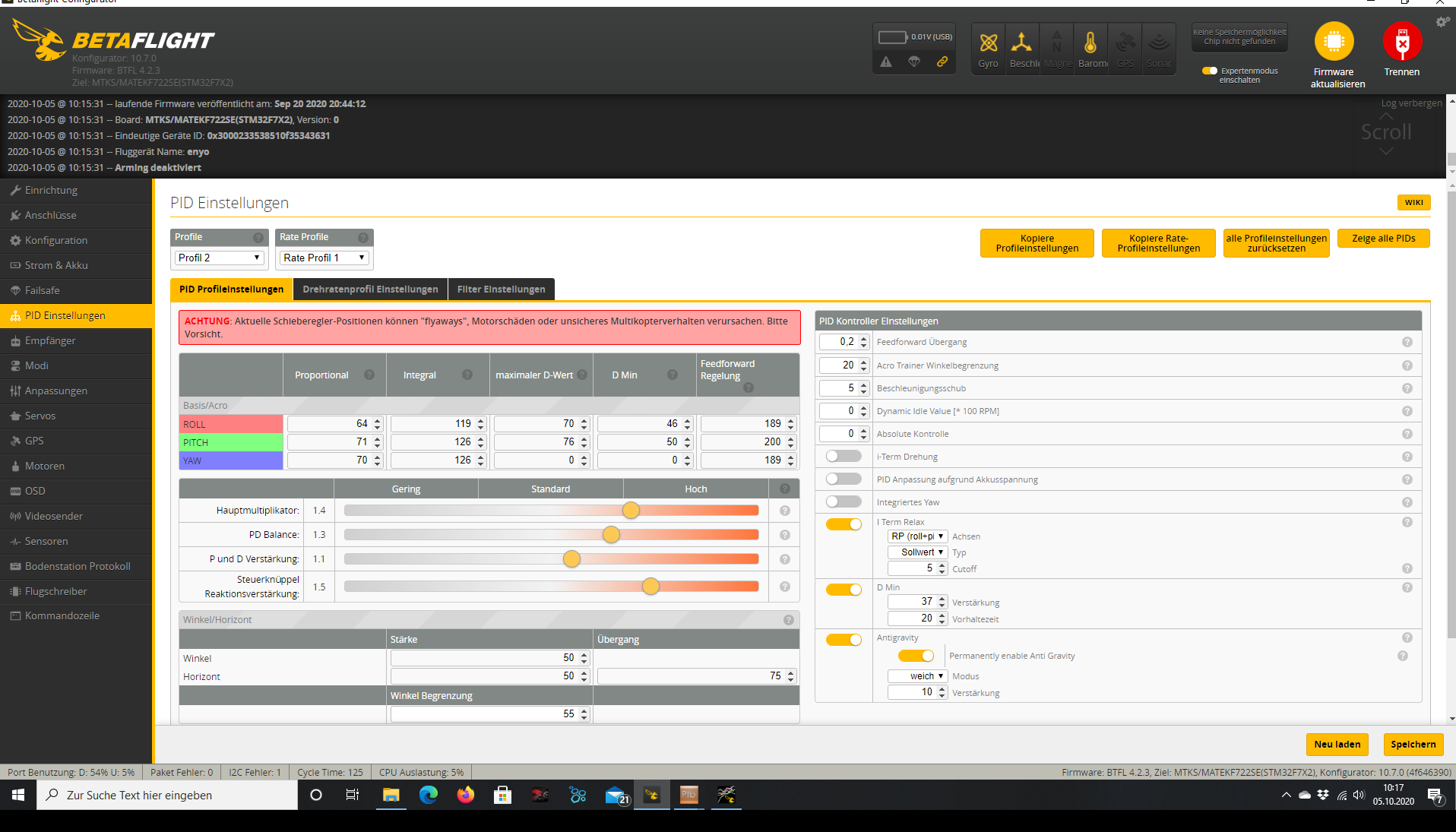
Changed the FC from radix to Matek F722se and the stock bearing to ceramic hybrid
It's like day and night. zero vibration on punchouts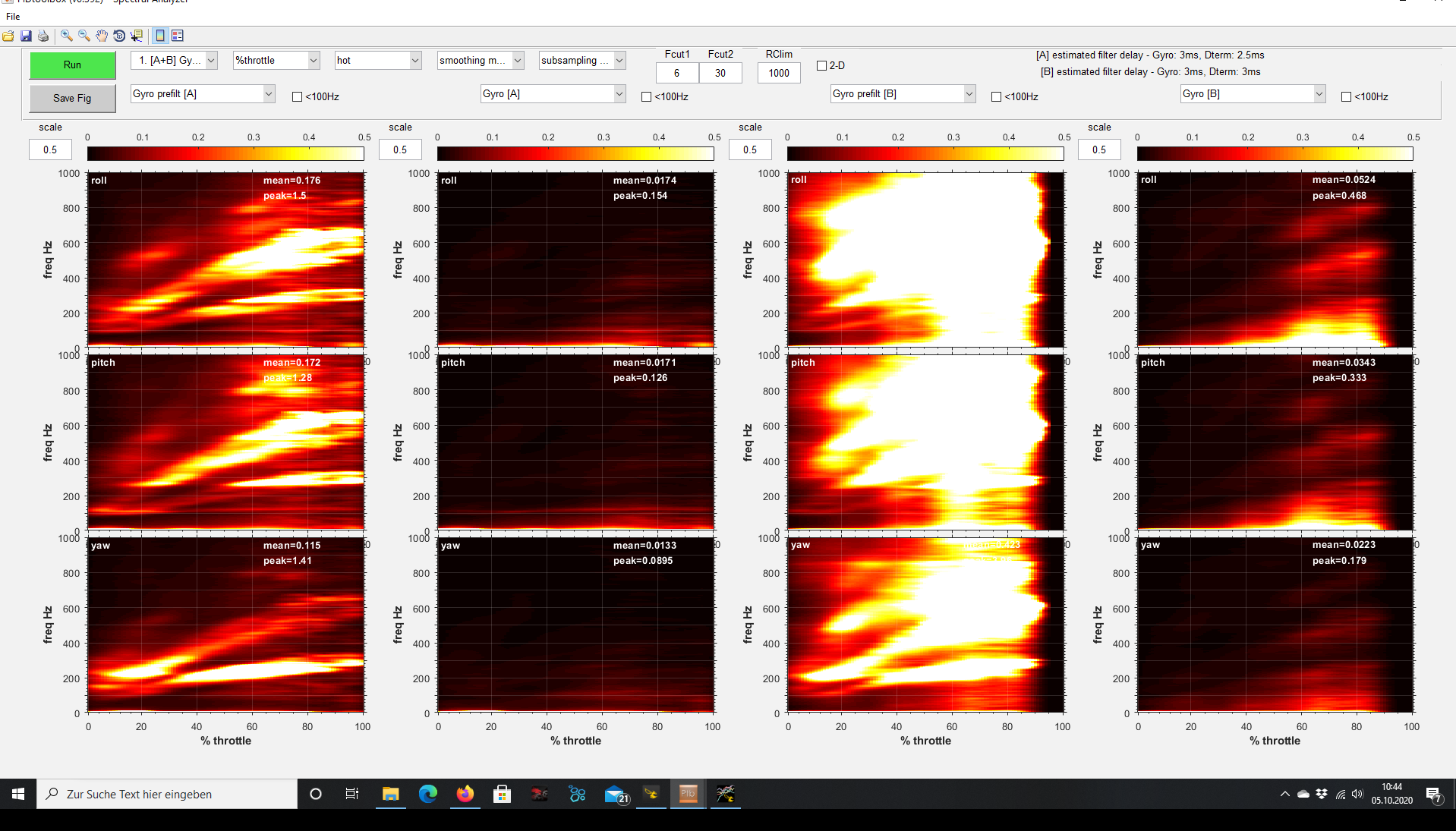
-
05.10.2020
final tune is done. Look at my settings the filter slider are at 1.5. I think it's amazing for a 8" quad. The ceramic hybrid bearings are running very smooth. - 11.10.2020
my actual ranking for the 5km and 10km challage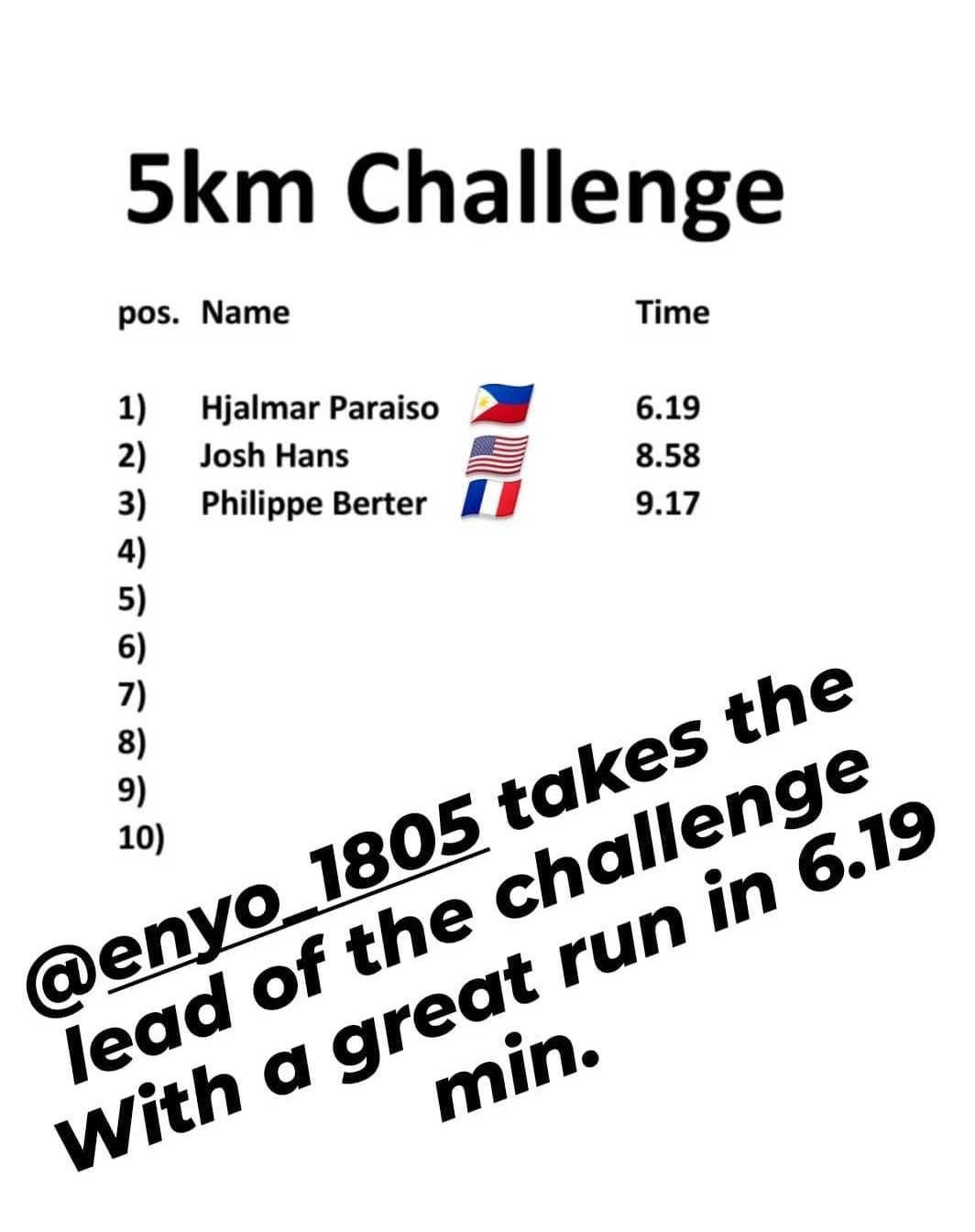

here are my final settings:
master
 set gyro_lowpass2_hz = 375
set gyro_lowpass2_hz = 375
set dyn_notch_width_percent = 0
set dyn_notch_q = 200
set dyn_notch_min_hz = 80
set dyn_notch_max_hz = 650
set dyn_lpf_gyro_min_hz = 300
set dyn_lpf_gyro_max_hz = 750
set acc_calibration = 135,-54,373,1
set min_check = 1000
set max_check = 2000
set rc_smoothing_derivative_type = PT1
set fpv_mix_degrees = 30
set serialrx_provider = CRSF
set blackbox_p_ratio = 64
set min_throttle = 1070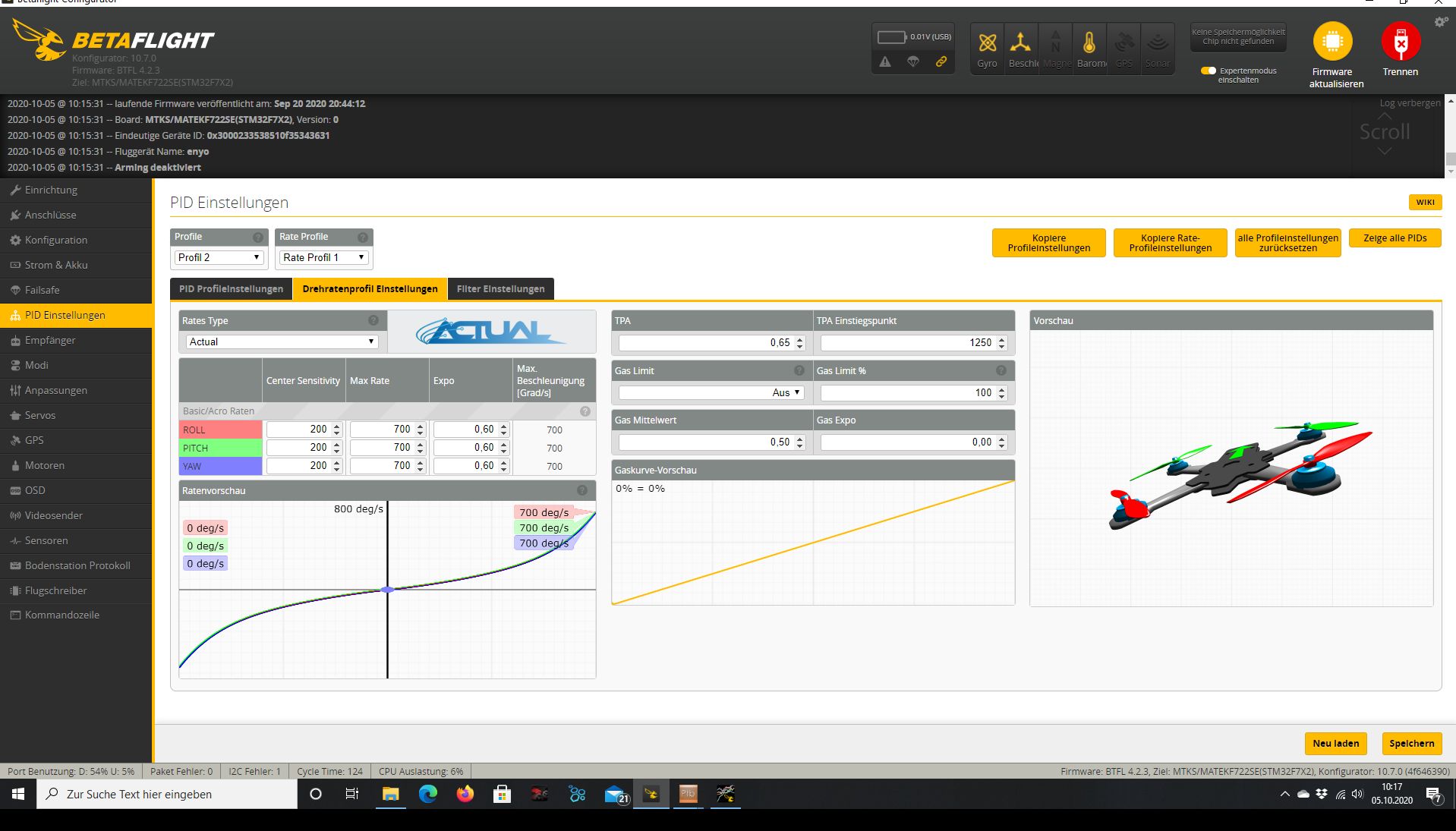 set dshot_idle_value = 800
set dshot_idle_value = 800
set dshot_bidir = ON
set use_unsynced_pwm = OFF
set motor_pwm_rate = 480
set failsafe_delay = 5
set failsafe_procedure = GPS-RESCUE
set ibata_scale = 184
set beeper_dshot_beacon_tone = 4
set small_angle = 180
set gps_provider = UBLOX
set gps_sbas_mode = EGNOS
set gps_auto_baud = ON
set gps_ublox_use_galileo = ON
set gps_set_home_point_once = ON
set gps_use_3d_speed = ON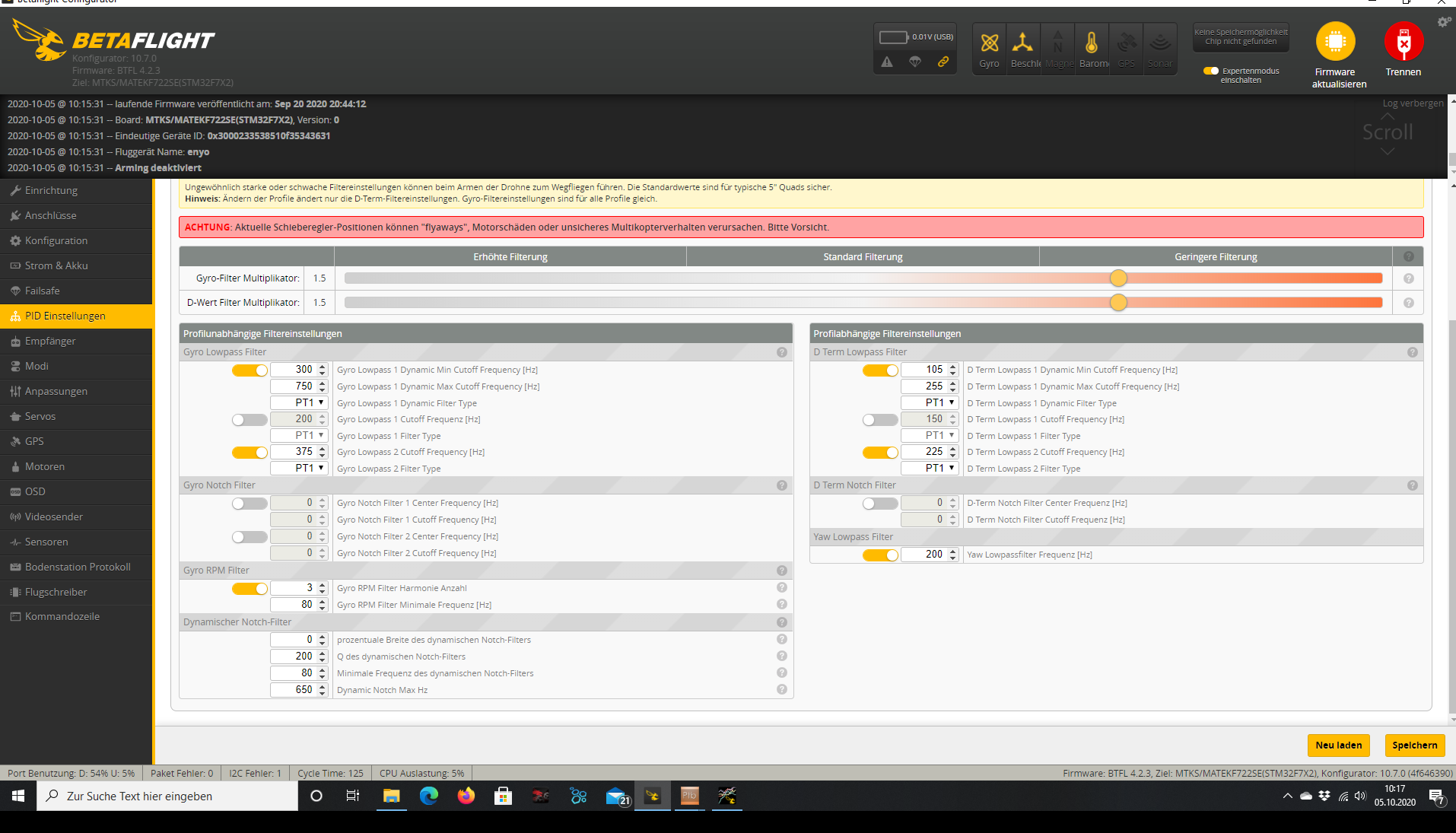 set gps_rescue_angle = 45
set gps_rescue_angle = 45
set gps_rescue_initial_alt = 100
set gps_rescue_descent_dist = 50
set gps_rescue_ground_speed = 1388
set gps_rescue_throttle_min = 1150
set gps_rescue_throttle_max = 1500
set gps_rescue_sanity_checks = RESCUE_SANITY_FS_ONLY
set gps_rescue_allow_arming_without_fix = ON
set thrust_linear = 20
set osd_warn_rssi = ON
set osd_warn_link_quality = ON
set osd_rssi_alarm = 80
set osd_cap_alarm = 1100
set osd_vbat_pos = 341
set osd_rssi_pos = 6363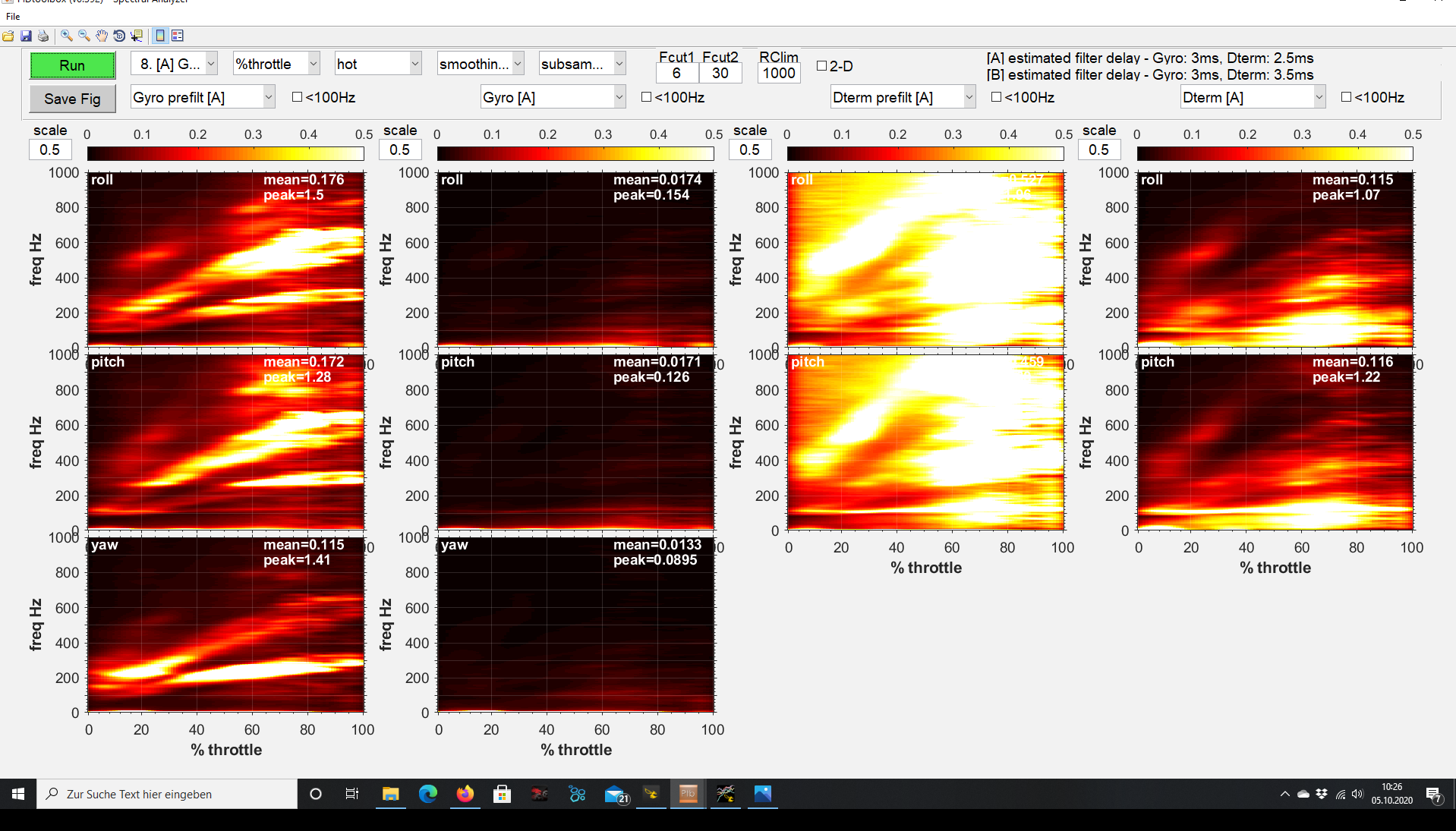 set osd_link_quality_pos = 251
set osd_link_quality_pos = 251
set osd_rssi_dbm_pos = 345
set osd_tim_1_pos = 6199
set osd_tim_2_pos = 6177
set osd_remaining_time_estimate_pos = 313
set osd_flymode_pos = 65
set osd_current_pos = 6635
set osd_mah_drawn_pos = 6630
set osd_craft_name_pos = 6201
set osd_display_name_pos = 6314
set osd_gps_speed_pos = 6502
set osd_gps_lon_pos = 6159
set osd_gps_lat_pos = 6148
set osd_gps_sats_pos = 6426
set osd_home_dir_pos = 6223
set osd_home_dist_pos = 6336
set osd_flight_dist_pos = 353
set osd_altitude_pos = 6515
set osd_warnings_pos = 6570
set osd_avg_cell_voltage_pos = 6641
set osd_pit_ang_pos = 2445
set osd_disarmed_pos = 236
set osd_nvario_pos = 6400
set osd_esc_tmp_pos = 33
set osd_rtc_date_time_pos = 35
set osd_flip_arrow_pos = 6382
set osd_rate_profile_name_pos = 294
set osd_efficiency_pos = 416
set osd_stat_max_spd = OFF
set osd_stat_max_dist = ON
set osd_stat_min_batt = OFF
set osd_stat_endbatt = ON
set osd_stat_max_alt = ON
set osd_stat_bbox = OFF
set osd_stat_min_link_quality = ON
set osd_stat_max_fft = ON
set osd_stat_total_time = ON
set osd_stat_total_dist = ON
set osd_stat_min_rssi_dbm = ON
set debug_mode = GYRO_SCALED
set gyro_1_align_pitch = 1800
set gyro_1_align_yaw = 1800
set gyro_2_align_yaw = 900
set gyro_rpm_notch_min = 80
set name = enyo
profile 0
profile 0
set dyn_lpf_dterm_min_hz = 105
set dyn_lpf_dterm_max_hz = 255
set dterm_lowpass2_hz = 225
set vbat_sag_compensation = 100
set anti_gravity_gain = 10000
set feedforward_transition = 20
set iterm_relax_cutoff = 5
set yaw_lowpass_hz = 200
set p_pitch = 71
set i_pitch = 126
set d_pitch = 76
set f_pitch = 200
set p_roll = 64
set i_roll = 119
set d_roll = 70
set f_roll = 189
set p_yaw = 70
set i_yaw = 126
set f_yaw = 189
set d_min_roll = 46
set d_min_pitch = 50
set ff_interpolate_sp = AVERAGED_3
set ff_spike_limit = 55
set ff_smooth_factor = 40
set ff_boost = 0
rateprofile 0
rateprofile 0
set rates_type = ACTUAL
set roll_rc_rate = 20
set pitch_rc_rate = 20
set yaw_rc_rate = 20
set roll_expo = 60
set pitch_expo = 60
set yaw_expo = 60
set tpa_breakpoint = 1250
feel free to leave a comment and like my build

Photos













Part List
Show stores (18)
I read you had some problems with your props, if you wanna go back to bi-blades. Man the graupner I use are superb. Been flying on the same set for over half a year now, no problems and butter smooth. I did balance them them back in the day for optimal results.




were did you order your ceramic hybrid bearings from?

Very clean build man. I just built my 8" yeti and been messing around with different props. currently on HQ 8x4.5x3. They fly really well but looking to get some more range. Are you able to fit 9" bi blades on this rig?
I am curious out of all the props you've tested, witch ones did you like the most? and also how did you like the 9" props?
hey question. are you using the 1115kv motors as 6s? and if so, how long flight times are you gettimg?



good luck on beating your record
my record is 500m with a 2000mw VTX

okay something there is not right. you should have wayyy more range. do you know anyone who you could borrow goggles to test and see if it is your rapidfire module? make sure your vtx antenna is mounted up and away. the further from the quad, the better. and obviously if there are a ton of obstacles it wont go very far.
goggles are fine, among the best in my fpv group (analog)
I am trying to order a immersion rc power meter but it's always out of stock.
on the 2w setup i mounted the lipo bottom the antenna VTX is completely free.
the environment is not easy, its a valley with some building here and there and probably bouncing waves from the cells towers.
maybe the 5.8ghz is used for something else then fpv in my country on in this particular valley.



Guides & Reviews

AirbladeUAV has done it again and this time they've brought long range to the 5" class! Based on the popular Transformer Mini, the new Transformer 5" Ultralight adopts a lot of the same design philosophies with larger props and more payload capacity. It can fly upwards of 20 minutes on a 4 cell Li-Ion battery pack and in ideal conditions it's got a range of over 4 to 5 miles. In this guide I'll walk..
Read more
With the release of the DJI FPV Drone cinematic FPV has become a lot more accessible, but you certainly don't want to crash a $750 drone! The QAV-CINE Freybott is a compact, lightweight cinematic FPV drone that can take a hit and keep going. It's a lot safer to fly indoors and around people. With a naked GoPro or the SMO 4k you can capture some great stabilized footage. In this guide I'll show you..
Read more







Man, that place in your video is dirt bike heaven 🤤, where are you located?
its in germany near dortmund. where are u living?
Southern Ontario Canada (Sarnia) to be exact. It's absolute Bollocks here😵💫