Realacc Real3 Y4 Conversion
 By Jayembee67 on Mar 13, 2020
By Jayembee67 on Mar 13, 2020
After my disappointing, and not a little frightening, experiences with the Y-Knot build, I still hadn't actually managed to fly a Y4 quad for more than about 30 seconds. So whilst waiting on replacement parts, I raided the Big Box of Benched Quads in the basement looking for something that I could quickly and dirtily convert into a Y4 layout. (I wanted to establish whether the issue was the hardware, or frame or what, so building another seemed a good test). I thought that something with raised arms would help with the rear rotor setup, and so I dug out my old Realacc Real3 build. It's antiquated by this hobby's standards: 2205 4S-max motors, massive full size camera, Omnibus F3 FC running BF 3.0.4 no less.
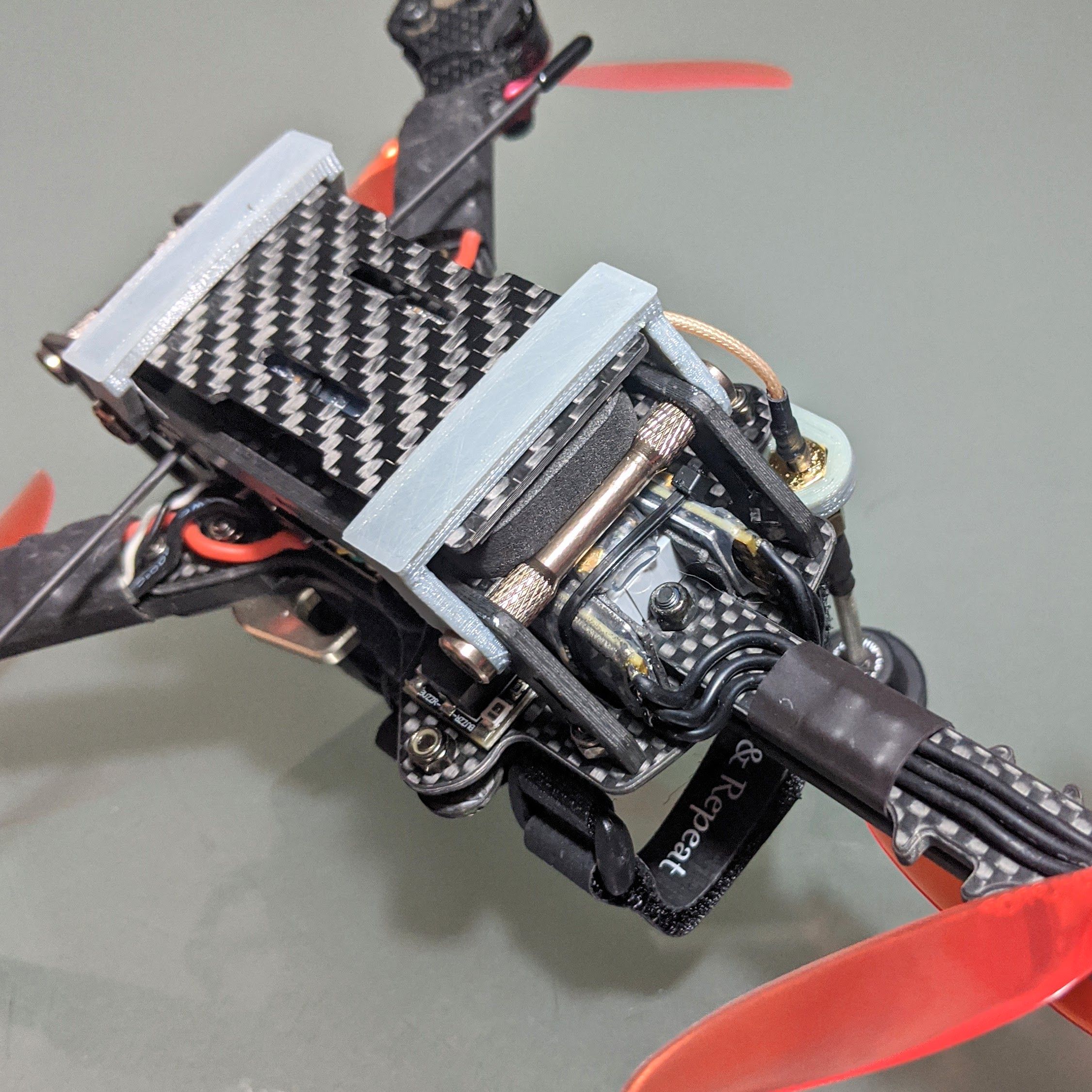
As I started to take it apart, I found this frame seemed almost designed to do this conversion. There is a spacer bolt in the middle of the rear of the frame that fits through the first bolt hole in the rotor arms, rather conveniently placing the centered rear motors at almost exactly the same distance from the CoG as the front motors. So I could securely mount the rear rotor arms in just the right position with no cutting or drilling, and in fact could reverse this conversion with zero damage if it doesn't work out. Splendid!
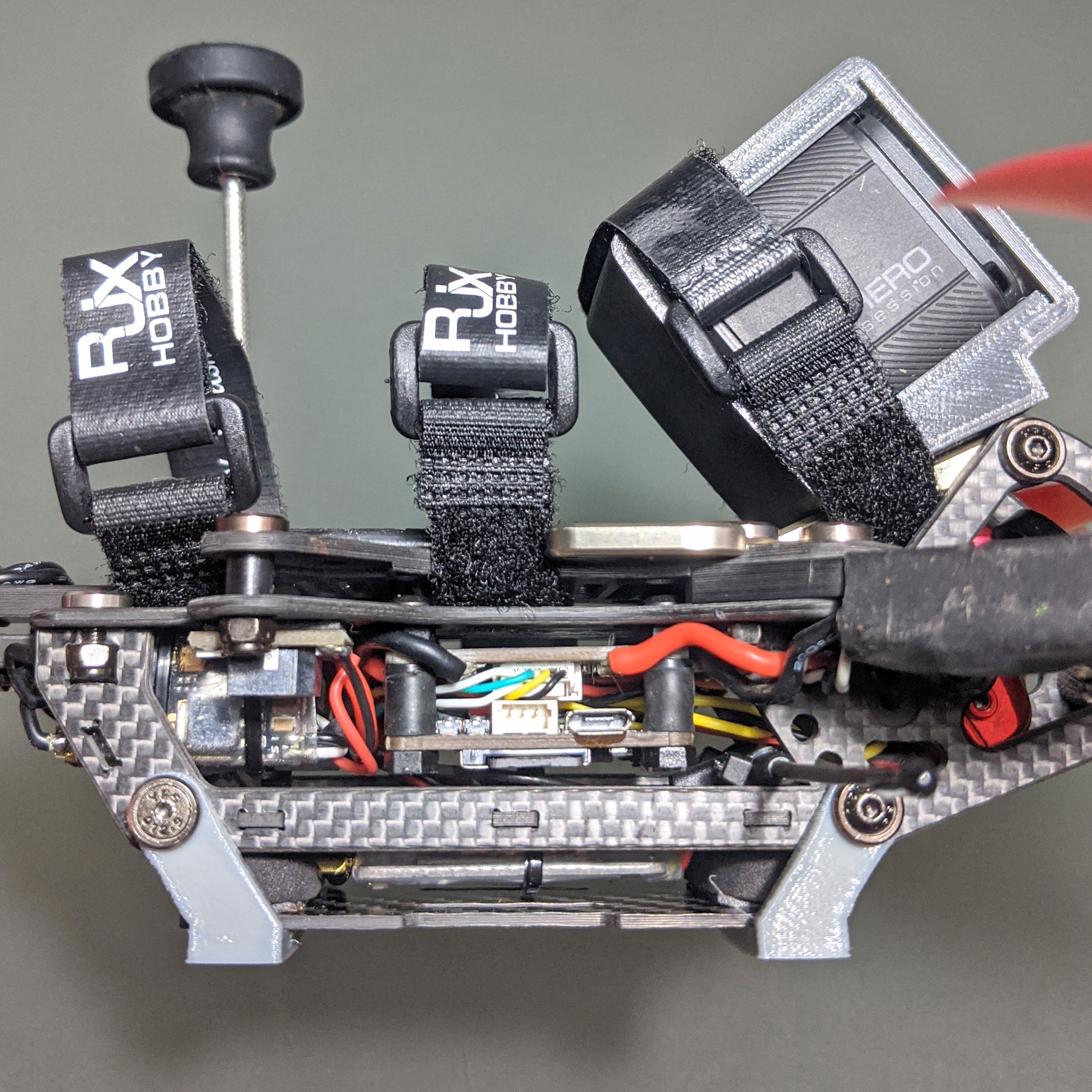
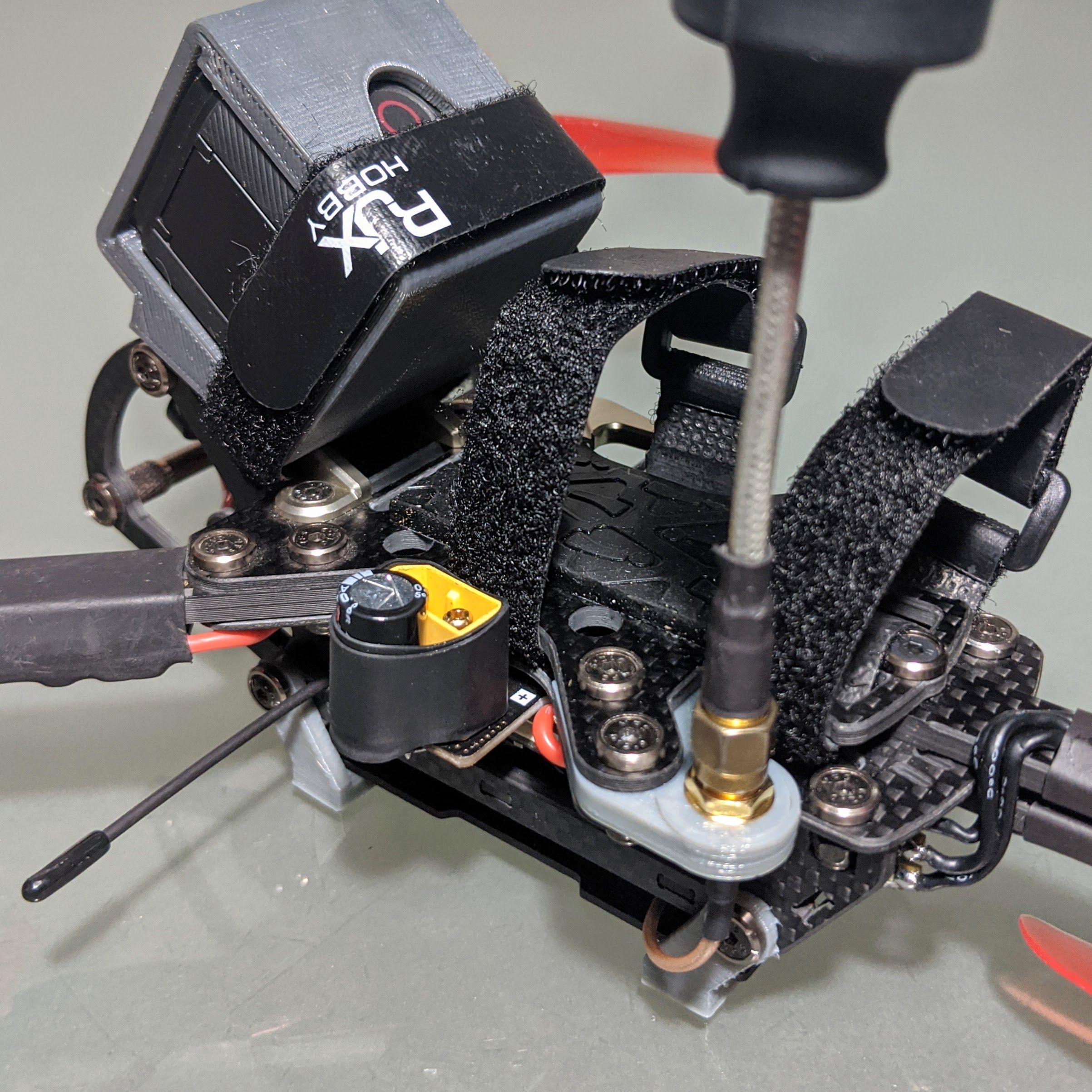
I didn't unsolder the ESCs from the FC, just stuffed them into the back of the frame (braced against a little stack of Lego, as it goes), and extended the motor leads. But this meant there was no space inside the frame for a VTX, so I was forced to put it under the bottom of the frame, and then shield it with a carbon battery plate mounted on two foam landing pads. But this in turn worked out surprisingly well as it raised the quad up enough to give the clearance needed for the bottom rear rotor. I also printed up a couple of simple braces to keep the battery plate in place, and that gave me LRF support and a touch more rotor clearance.
Finally I printed a simple SMA mount that could bolt into one of the now vacant rear rotor arm slots. This is perhaps not the sleekest of placements, but it does keep the antenna out of the way of the props, which is not the easiest thing to do with a Y4 configuration.
All of this required a pleasingly small amount of effort, I was done in an afternoon (OK, a fairly long one), and yet it's surprisingly clean. It reminds me of some sort of anime vehicle, which is no bad thing.
BUT!
It is a machine that only flies clockwise. In testing this machine in the last few days, I think that I have worked out why the Y-Knot was such a flyaway monster, and I know why both of these Y4 machines only fly clockwise (or flyaway to the moon), but I have absolutely no idea how to solve the issue.
So as I understand it (I may be wrong here), this machine yaws by changing the speeds of the rear motors, spinning up the top motor to yaw clockwise, slowing it down to yaw counter-clockwise. Cunning. Unfortunately, from the Black Box logs I see the top motor spools down to idle when I try to yaw counter-clockwise, which makes the thing lose all authority and go alarmingly floaty.
Both Y4s have done this exact same thing, in Angle and Acro modes, and I have tried BF 3.0.4, BF 3.5.7, and BF 4.1.4, every firmware has exhibited the same issue. And if you turn on Air Mode and CC yaw it flies away to the moon (which is why the Y-Knot build is currently broken).
But Y4 quadcopters exist in the world, and BetaFlight has built in mixers for Y4, and I'm using the defaults, why then have I built two quite different machines that only fly clockwise?! It's mysterious and maddening and the internets don't seem to offer any answers. If anyone here can advise, I really would be most grateful.
It's a shame because these Y4 builds are so interesting looking, and this machine actually flies really smoothly. When it's going clockwise... Gah!!
Here it is being maddening:
UPDATE 2020-03-16
I got it working. Against all the odds, and almost accidentally, I got it working. Having tried altering pretty much everything I could possibly alter in BF, and still having the machine spin out, in desperation I reversed the direction of all the motors, such that the front motors spin out, not in... and it flies just fine, thank you very much. Good. Grief.
Which does rather taste like a BetaFlight bug in truth, I can't really see this changing the physics of the rear motors that significantly, but what do I know? I am happy that the thing finally flies. And flies OK, not amazingly, but OK. Not an Acro machine, but a surprisingly smooth cruiser. I did feel it skating out at the back a couple of times at more agressive throttle, but it flies in Air Mode without running away, and I got 4 1/4 minutes out of a 1300mAh 4S, which is enough.
Here's a fairly unexciting maiden flight, but look, look at it not spinning out or running away. I'll take it:
Photos









Part List
Show stores (9)
Yo....this is a very interesting build, i love this kind jazz, have you thought about trying with the rear single motor inverted an the 2 front motors staying the way they are?
lm curious to see if that helps, so that would be a rear prop wash of going 180 degress oppisite and the front motors doing there rotations at averted....hell its worth a shot, good job bro.
I have lots of configurations going on in my head, so it would be a intresting topic for us to consider....cheeerss...👌

Thank you! And yes, I do have a soft spot for these weirder flying machines myself.
So the problem with inverting just one of the rear motors would be that then both of the rear motors would spin in the same direction and so you would never be able yaw in the direction opposite to the motor spin. They have to counter-rotate.
But you might be onto something here, I might just switch the spind directions of both rear motors and flip the props and see if that helps at all. But I fear that I will just find I can then yaw CC but will see the same problem yawing CW. This is starting to feel like a BeatFlight bug, but I really can't believe that NO ONE has built a flying 5" Y4 since BF 3.0.4 was released (there are several 3" and smaller Y4 machines on the market, but their motors will be spinning way faster so likely have much more headroom to spin up and down).
And yes! Build your crazy idea builds! It's part of the fun of this hobby, the bonkers things you can get into the air. I just wish this thing would stay in the air... Sigh.
Guides & Reviews

AirbladeUAV has done it again and this time they've brought long range to the 5" class! Based on the popular Transformer Mini, the new Transformer 5" Ultralight adopts a lot of the same design philosophies with larger props and more payload capacity. It can fly upwards of 20 minutes on a 4 cell Li-Ion battery pack and in ideal conditions it's got a range of over 4 to 5 miles. In this guide I'll walk..
Read more
With the release of the DJI FPV Drone cinematic FPV has become a lot more accessible, but you certainly don't want to crash a $750 drone! The QAV-CINE Freybott is a compact, lightweight cinematic FPV drone that can take a hit and keep going. It's a lot safer to fly indoors and around people. With a naked GoPro or the SMO 4k you can capture some great stabilized footage. In this guide I'll show you..
Read more







This is so interesting, the vid you posted with the blackbox overlay is very telling. I wonder what a good strategy to keep the rear top motor spinning in hard CC yaw would be? If you raised your idle up to the point that it takes off with no throttle input, you might never get it to land while there was still juce in the batteries, so that doesn't sound great. I wonder how you can manually config the front motors to handle more of the yaw than the back ones....
It really is odd. And I did try raising my idle to 6% just to see, and then got really exciting flyaways on yaw failure. Which of course meant I was still getting yaw failure. So, a 2-for-1, yay.
My current theory, which I shall try to test soon, is that my yaw rate is too high. I have my rates set to my standard freestyle rates of ~1000 degrees/s, and I am now wondering if the maths in the f/w dictates that the % spindown required to get to 1000d/s CC is so large that it accidentally idles the motor, because most of the yawing is being done with a single motor instead of all 4...? (maybe, perhaps? This is all conjecture of course). So I am going to test with much lower yaw rates, which might be miserable to fly, but if the yaw spinout goes away, maybe I can increased those rates to a sensible middle ground.
Just to close the loop, changing the Yaw rates had no effect, the Y4 still spun out on the turns. So in desperation, I reversed all the motors so that the front motors spin outwards not inwards, and bingo, it flies and flies just fine. I even got some poor and wobbly acro out of it. What a faff all that was.
That's so cool!