
A 3 inch drone with full DJI digital FPV and a AUW of 246 grams. This is my first digital build, and to go from budget analog goggles with a small FOV to digital goggles with a large FOV is a massive improvement. It is not only more fun, it also makes it easy to fly and land in tight spaces. This drone is also smaller compared to my previous 5 inch drones, to better adapt to the new regulations. So far I like the smaller size more since it flies well, make less noise and would cause less damage in a crash.
The build
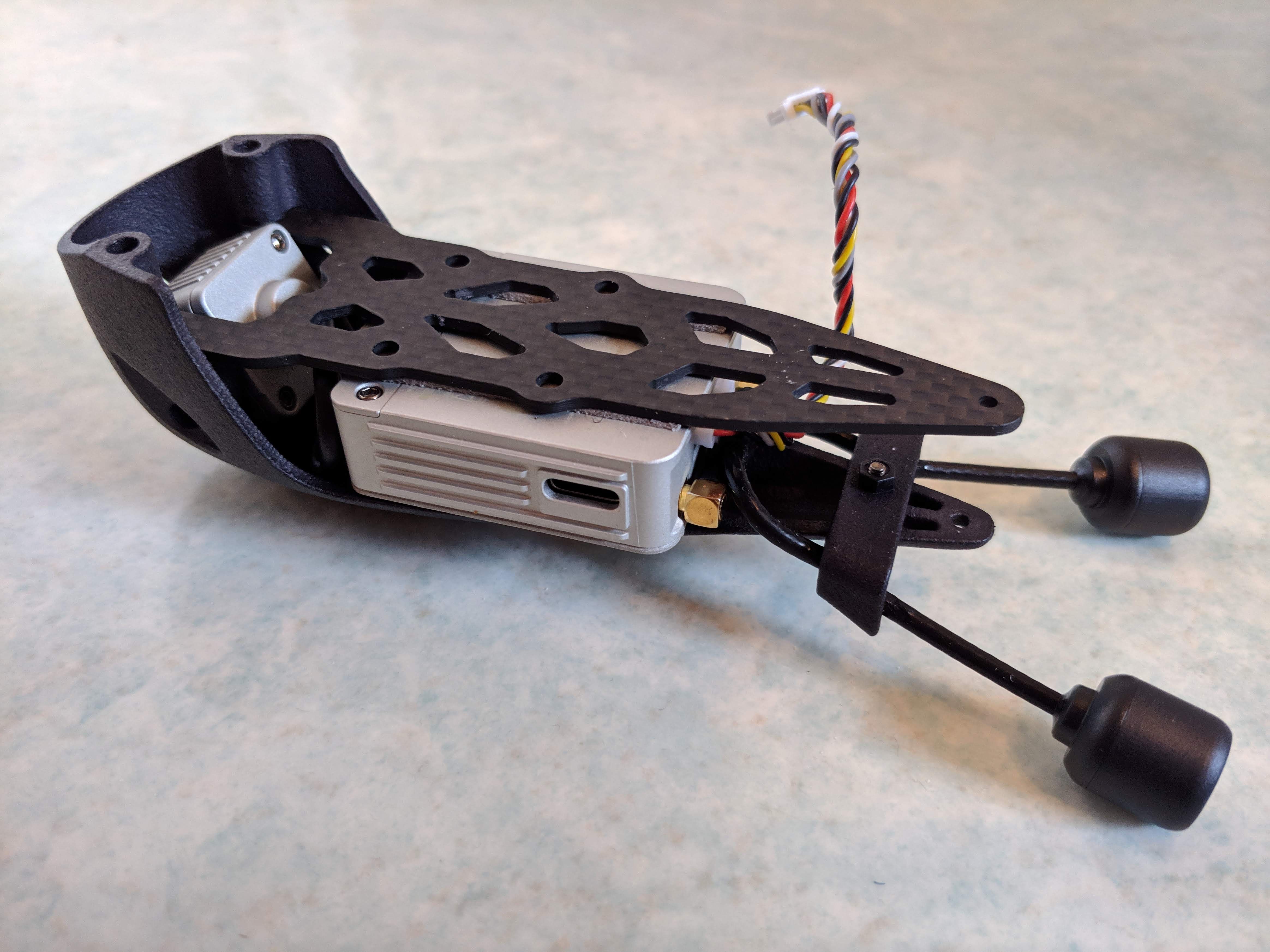
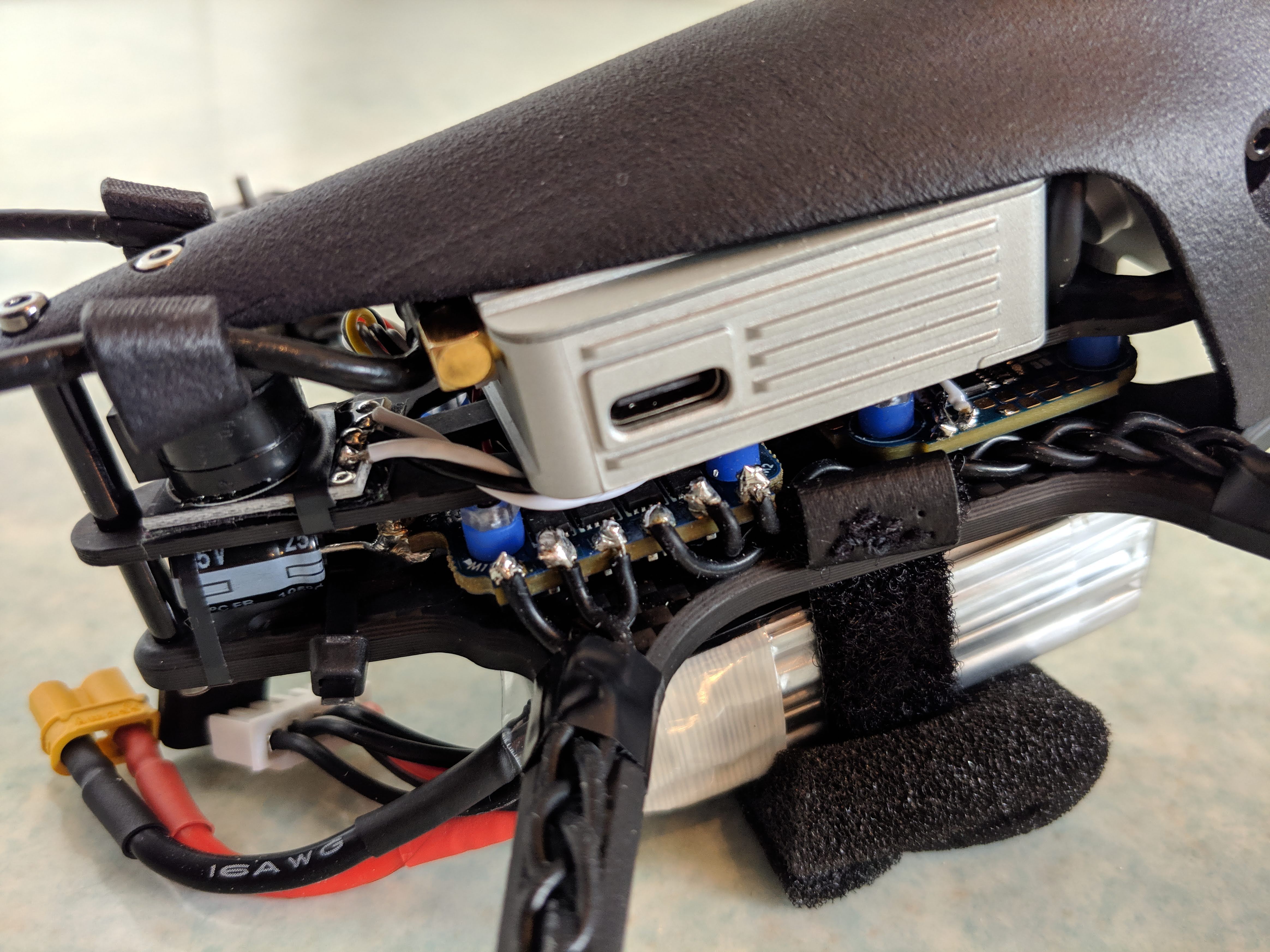
The DalRC DJI-F5 frame is made for a full size air unit and two side by side mounted 20x20 boards. Using those components makes the build quite straight forward, although planing is needed. The Succex-D mini FC fit well with the air unit and of course also the Succex-D mini 4in1 ESC. 40A is overkill for this build, but I did not find any other nice 4in1 20x20 32-bit ESC for notably cheaper price. I attached one capacitor, although I don't know how much it is needed. NIN 1404 3750kv motors fit the frame with no problems and is powered by a 4S 450mAh or "650mAh" battery. 3x3x3 propellers are used.
I used two small strips of 1mm thick double-sided foam to attach the air unit to the middle plate. When screwing the build together, the middle plate and top canopy put pressure on the air unit, which works well with the foam for to hold the air unit in place. There is very little material in direct contact with the air unit, which should help reduce the heat in the air unit. The frame looks weak with only three screws holding it together but feels a bit better in hand, although not super sturdy. The stack mounting screw diameter is 2mm (not stated on the web) and fit the Succex-D mini stack when using the grommets.
To reduce damage on the bottom mounted battery when landing on hard surfaces, I attached some foam to the bottom of the battery strap. The foam is from the package the batteries arrived with. Only adds 1 gram and some wind resistance to the build.
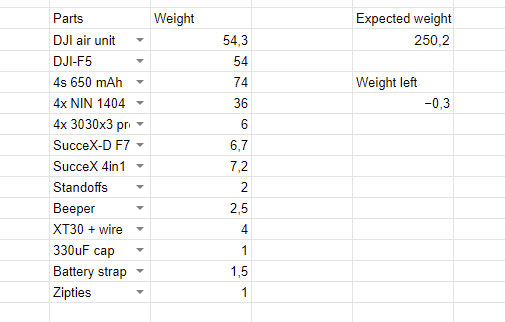 I include a screenshot of the plan with expected weight of the drone. To plan with -0.3 grams left seems optimistic, but I also bought a smaller 450mAh for to test with which also can be used to reduce weight. The reason to why the drone weights less than in the plan is mostly because the "650mAh" batteries weights 67g instead of 74g stated on the web (some sites say 69g). Comparing the dry weight (drone without battery), the drone is slightly heavier with 179.5g compared to the estimated 176g.
I include a screenshot of the plan with expected weight of the drone. To plan with -0.3 grams left seems optimistic, but I also bought a smaller 450mAh for to test with which also can be used to reduce weight. The reason to why the drone weights less than in the plan is mostly because the "650mAh" batteries weights 67g instead of 74g stated on the web (some sites say 69g). Comparing the dry weight (drone without battery), the drone is slightly heavier with 179.5g compared to the estimated 176g.
Regarding the Tattu 650mAh 4S battery, I write "650mAh" battery because it feels more like 550mAh. When charging the batteries, ~390mAh goes in to the 450mAh battery while only ~480mAh goes in to the "650mAh" batteries. The weight of the "650mAh" batteries is also more close to 550mAh when comparing it to other 450mAh, 550mAh and 650mAh batteries on the web. This applies to all three Tattu 650mAh batteries i own.
Broken parts and problems
One of the metal pins in the small port/connector on the FC (for the cable between FC and air unit) was skew and touching another pin. Those pins are so tiny. The tip of a scalpel was used to bend back and fix the pin. I suspect someone else had the FC before and returned it to the store, since there also were multiple setting made on the FC for led, receiver and more.
The expensive Acrobrat LiPo strap broke from being bent to sharp. Luckily only the rubber on the back broke while the "loops" on the inside still held the strap together.
The buzzer always make a loud beep directly when plugging in the battery, almost before the FC has fully started. I have disabled almost all buzzer settings in Betaflight, which removed some later beeps, but the initial beep is still left. If anyone knows how to fix this I would be happy to know.
The recordings on the air unit would often (but not always) stop with the message slow SD. This is using a SanDisk Extreme SD card with a write speed of 60MB/s. I then bought a SanDisk Extreme Pro SD card with write speed of 90MB/s, but it did not solve the problem. Next change was downgrading the air unit, goggles and remote controller to version 1.0.4, which solved the recording problems.
Motors
Using both large 1408 motors and a full air unit would make it very hard to achieve a AUW below 250 gram. I was worried smaller motors would not be enough since a lot of other 3 inch builds use large 1408 motors. Some people also say that smaller motors are to weak. However, when looking at thrust test I did not notice that much of a difference in max pull between 1404, 1408 and similar motors. The larger motors also seems more power hungry, requiring a larger battery. Heavy motors and a large battery does add a lot of weight to the build. Many other 3 inch drones with 1408 motors have an AUW of about 400 grams and those heavy builds probably needs larger motors. Also, my goal was not to build a racing drone which would blast through the sky but rather a more easy controlled and fun drone for freestyle.
The NIN 1404 3750kv motors perform well. Hover at 25% throttle. Currently I feel like the 450mAh or "650mAh" batteries are the limiting factor for max power, as a 100% throttle make the battery warning go off very fast. Changing only the motors to less efficient larger motors should only make the performance worse. 75% throttle still gives high acceleration (enough for me) and is more kind to the batteries compared to 100% throttle. With default tune on Betaflight 4.1.6 it did however have problems with prop wash. Tuning the quad and updating to Betaflight 4.2.0 significantly improved the prop wash handling.
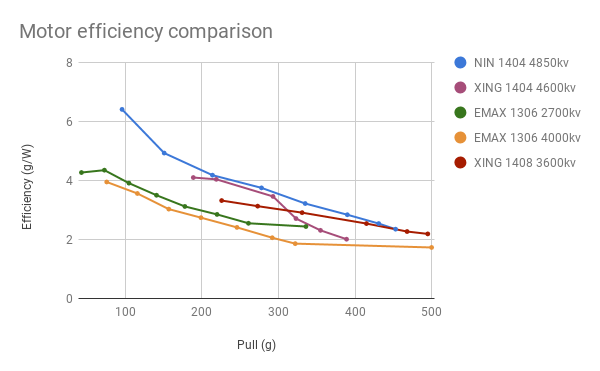 Since it is hard to fully understand the results from different thrust test only by looking at the numbers in the tables, I created a plot visualizing the change of efficiency over thrust for different motors. I could not find any thrust test for the NIN 1404 3750kv motors used in this build. The tests are all done with 16V or close. The propellers are all 3 inch long and with three blades. All are close to 3 inch in pitch except for the larger 1408 motor using a propeller with 4 inch pitch. Note that the dot furthest to the right for each motor also indicates that motors max power. It is easy to imagine the lines continuing to the right, but they do not. On the other hand, the lines should continue to the left.
Since it is hard to fully understand the results from different thrust test only by looking at the numbers in the tables, I created a plot visualizing the change of efficiency over thrust for different motors. I could not find any thrust test for the NIN 1404 3750kv motors used in this build. The tests are all done with 16V or close. The propellers are all 3 inch long and with three blades. All are close to 3 inch in pitch except for the larger 1408 motor using a propeller with 4 inch pitch. Note that the dot furthest to the right for each motor also indicates that motors max power. It is easy to imagine the lines continuing to the right, but they do not. On the other hand, the lines should continue to the left.
The graph shows that higher power results in less efficiency, at least for the ~50% to 100% throttle range. The graph also makes it easy to compare efficiency of different motors at a specific thrust amount. The smaller 1404 motors seems to be performing better at lower amount of grams pull, while the motors are more equal at higher amount of pull.
Flight time
Hovering for 7:30 with a "650mAH" LiPo consuming 480mAH and for 6:20 with a 450mAH LiPo consuming 390mAH. This is with 4S batteries, 1404 3750kv motors, 3x3x3 propellers, 48kHz PWM frequency and close to no other tuning. Changing the ESC PWM frequency from default 24kHz to 48kHz increased the hover time with about 20 to 40 seconds.
A normal flight last about 4 minutes for either of the two batteries.
DJI goggles, controller and QuadGuard TX case
 The DJI goggles and DJI controller fit in the Lowepro QuadGuard TX case, but it is tight. Some modifications with a scissor is needed. The top of the goggles is a few millimeters to high and causes the lid to be slightly bent when closed. It should however not be much of a problem since the bottom is semi-soft, as long as the bag is not put under heavy pressure. The top two antennas need to be removed before closing the case. I am considering buying the TrueRC stubby antennas, since they should be able to sit on the whole time.
The DJI goggles and DJI controller fit in the Lowepro QuadGuard TX case, but it is tight. Some modifications with a scissor is needed. The top of the goggles is a few millimeters to high and causes the lid to be slightly bent when closed. It should however not be much of a problem since the bottom is semi-soft, as long as the bag is not put under heavy pressure. The top two antennas need to be removed before closing the case. I am considering buying the TrueRC stubby antennas, since they should be able to sit on the whole time.
On the positive side, the tight case is small for what it contains. It also does a good job of keeping all items together and protected. It has additional foam which keeps the controller in place and thus helps protect the sticks, switches and antennas. The two bottom antennas on the goggles can be left on. When both goggles and controller is in, there is a small space left, suitable for batteries.
I replaced the default stick ends on the controller with the Jumper T16 Stick Ends Rocker. I really likes those stick ends, they feels good and have great grip. I am pinching the sticks.
Photos
















Part List
Show stores (8)

I had a DJI set up on this frame and while it flew well, it was cumbersome to build. On top of that a small crash into a tree shattered the top frame, weak materials and hard to source frame parts, I have to say it wasn't a good frame other than its looks.

Splendid stuff! And how is it flying? I had issues with mine oscillating at higher throttle, which I partly solved with RPM filtering and lower PIDs, but the issues still remain to a degree. I have recently got a similarly configurated Gecko build flying a lot better with 4.1.6, so I think I shall be updating my DJI-F5 very soon. It's a great looking frame though and a lovely tidy build!

Thank you so much. Apart from the prop wash it flies very well. I have not had any notable issues with oscillations at higher throttle, both for RPM filtering on and off. I have only been flying it with Betaflight 4.1.6, so I don't know if it would behave worse with earlier versions. Nice to hear your build flies better with Beftaflight 4.1.6. I am looking forward to Betaflight 4.2 which seems to improve flight performance even further.








Also, one last comment and I'll go away promise, but I saw you were having trouble with slow SD cards. I too have suffered with that and solved the problem with SanDisk U3 A2 cards, these seem more than fast enough. But then I updated all my Air Units to .500 firmware, and half the AU's would show slow SD errors or record less than a minute, and half were fine. As I use Crossfire, I went back to .400 Air Unit firmware, and have had no recording issues since.
Interesting. So it seems to be a software error causing recording problems. The card I had problems with is also a SanDisk U3 A2 card.
Update. I tried a SanDisk with write speed of 90 MB/s but it did not solve the recording problems. I then tried downgrading to 1.0.4 (as you did) which solved theproblem. 1.0.4 also records fine using a SanDisk with write speed of 60MB/s.
Aha! Yes, it seems that on certain Air Units, not all but a significant number, 1.0.5 is a lemon as far as recording goes. But excellent, glad that sorted you out too; it's so irksome when you land only to discover recording shut off some time ago.