Armattan Gecko 3" DJI Build
 By Jayembee67 on May 17, 2020
By Jayembee67 on May 17, 2020
I had seen a couple of successful DJI builds with the Gecko frame, and as I am fully committed to building a 3" fleet at the moment it seems, this was the next obvious choice.
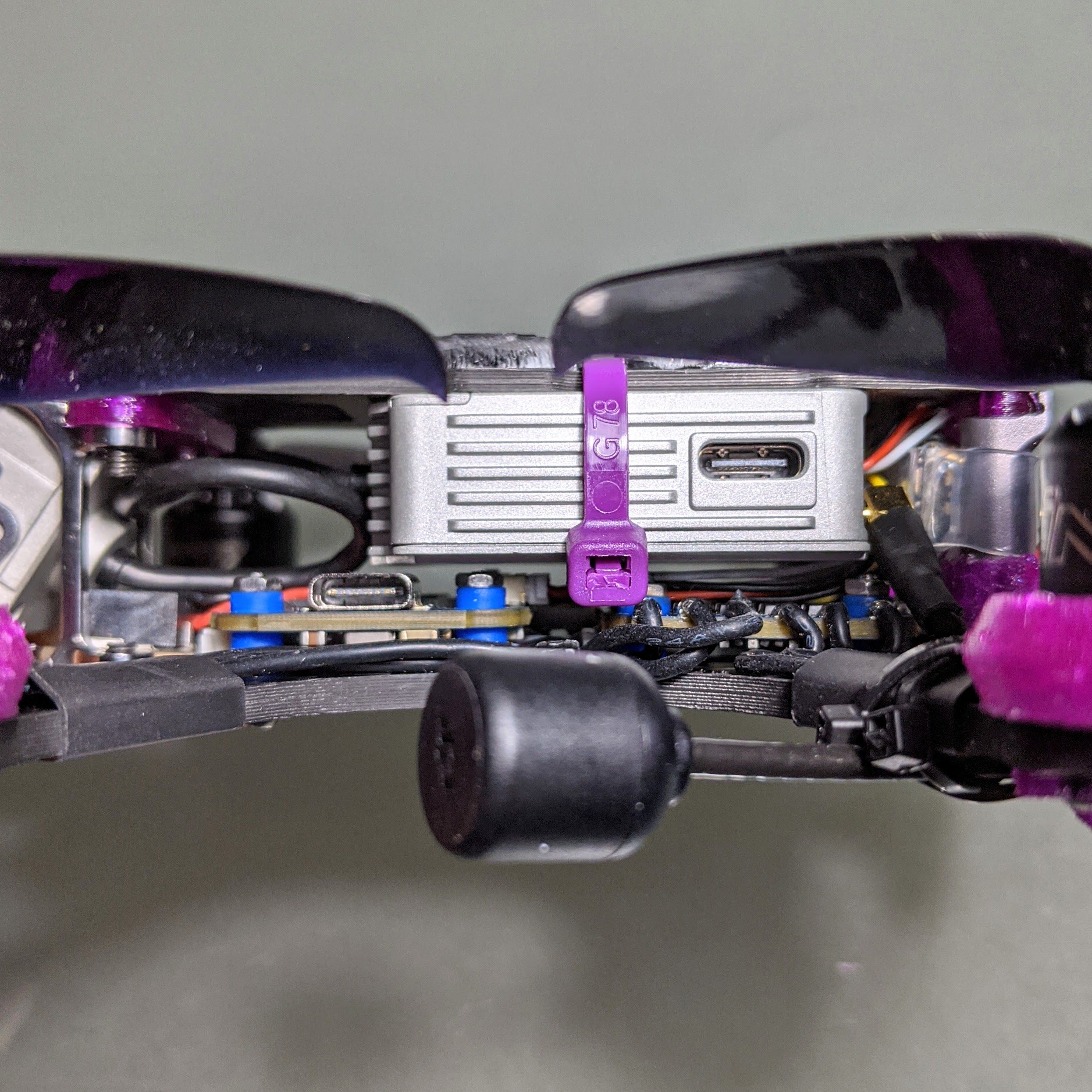
It was a surprisingly clean and easy build, given the very limited space, the side-by-side stack mounting holes mean this is possible. I could have just about got everything in there without modification, but in the end I added a couple of top-plate shims to give a bit more room between the Air Unit and the flight controller. Party to reduce heat transmission, but mostly to reduce vibrations.
And it's a great little flier, quick, agile, responsive, crisp video... BUT! It suffers from the same problem as my 3" DJI-F5 build; when the throttle gets beyond a certain point, I start to see fast yaw oscillation; you see it in the video, and I can see it in the blackbox traces on both gyro and PIDs. Which is really annoying as at lower speeds it's flying delightfully, and to be honest its low speeds are quite high. I have partly solved the problem by dropping the 4.1.x PID gain sliders way down, which has helped a good deal, but I am still seeing those oscillations when I push too hard, and by reducing the PIDs so much, I am losing some crispness in the handling. I did up my TPA breakpoint value, but I'm not sure if that helped very much, and I swapped the motor direction to props-out, which also seems to help some.
But if anyone has any suggestions as to how to tune out those higher-throttle yaw oscillations with 4.1.x, I would be very grateful!
Anyhow, for now this is flying acceptably, and it's actually lots of fun to throw around, but it's more ragged than I would like. And I can't get better prop-wash handling without making the yaw oscillations more pronounced. Here's a flight at the end of the first tuning session:
Photos










Part List
Show stores (6)
hey man what shims did you use here?

My pleasure! So I have managed to get this machine flying really quite well now, but it was a bear to tune; loads of mid-throttle shakes that defied all tuning out. But finally, once I upped the ESCs to 48kHz, and got RPM filtering on there, I managed to tame it. And now it's an absolute favourite.
I am flying more 3" machines these days, less and less local opportunities for the big rigs, and the Gecko always goes out with me; it's fast, agile, not as alarming to the passing civilians as the big machines, and still records HD. Ideal. Build one, or similar, they're great! :-)

Are you using RPM filtering? My Gecko also suffered from terrible vibes at mid to high throttle. RPM filtering significantly reduced it. I'm going to try BF 4.2 next. 4.2 is amazing at default values on my Rooster.
Thanks for your reply, I will give these a go. Ive built several quads but never really got the hang of tuning seems like there is alot of trial and error to get things sweet .
FYI my build is
Frame: Armattan Gecko 3"
FC: Talon F7 V2
ECS: Spedix GS25a 4in1
Motors: Tmotor F20ii 3750kv
Cam: Caddx Vista
RX: Crossfire nano
Props: Tmotor 3140
My rates are around
roll/pitch 900
yaw 700
Tune is pretty much just betaflight 4.2 stock settings. Beside what you guys have mentioned in the earlier comments. It flies pretty sweet but I guess where it could be bette is I get a fair bit of propwash after say a powerloop and you punch out of it. if that makes sense? could my idle valve be to low?
Thanks

Idle too low , try jacking it up a couple of % , but without actually looking at blackbox ( which i never use) nailing the perfect tune is hard without a ton of experience.
Also dropping in out of a loop is the worst for p wash, in that case i fly arround it, just keep on the throttle a bit and try to slide through the dirty air not just drop in to it.
Keep tweaking
I installed the latest Emuflight on my problematic Gecko last weekend. If flew well on BF 4.2 but i couldn't tune it enough to get any better . (no blackbox logging makes it more difficult). The 3" cinewhoop preset on Emuflight works just as good and possibly better. I have only flown a couple of packs but the motors are staying cool and I dont get much for vibrations. Havent tried any tuning beyond the preset. Emuflight seems to be easier to setup than BF 4.2. -- no VTX tables and rpm filtering. I really like the idea of presets for different size / style rigs. Also the stick feel PIDs are amazing. I do save and backup my 4.2 settings so I can flash back if needed. Might be worth a try on yours?

Guides & Reviews

AirbladeUAV has done it again and this time they've brought long range to the 5" class! Based on the popular Transformer Mini, the new Transformer 5" Ultralight adopts a lot of the same design philosophies with larger props and more payload capacity. It can fly upwards of 20 minutes on a 4 cell Li-Ion battery pack and in ideal conditions it's got a range of over 4 to 5 miles. In this guide I'll walk..
Read more
With the release of the DJI FPV Drone cinematic FPV has become a lot more accessible, but you certainly don't want to crash a $750 drone! The QAV-CINE Freybott is a compact, lightweight cinematic FPV drone that can take a hit and keep going. It's a lot safer to fly indoors and around people. With a naked GoPro or the SMO 4k you can capture some great stabilized footage. In this guide I'll show you..
Read more







Really nice build!
Can you please say, what's the total weight of your build (with and without battery)?
Thank you! It is a great frame, and one of my favourite machines.
So dry it weighs 235g, and with an 850mAh 4S pack it is 333g - sadly nowhere near the 250g 'limit'.