
Reusing components from an old quad to make two new quads. This one focuses on making a quad for medium long range. Longer antennas, less weight and more efficient thrust using the same motors but with lower voltage and longer blades. This one has about the same bench test thrust output as the old quad, but since it is more efficient and the old quad was held back by battery sag, this one performs better for e.g. racing and freestyling (except when crashing). The battery sag for this one is extremely low, it can hold above 75% throttle for more than a whole minute.
Flight time
Some hover tests. Changing to 4 inch 3S from 3 inch 4S seems to have made the biggest improvement in flight time. With this quad I often land because I want to land and not because the battery is low.
- old quad, 3x3x2 prop, new 4S 650mAh battery, 246g AUW: 7:30 min hover
- old quad, 3x3x2 prop, 1 year old 4S 650mAh battery, 246g AUW: 6:00 min hover
- new quad, 3x3x2 prop, 1 year old 4S 650mAh battery, 208g AUW: 7:20 min hover
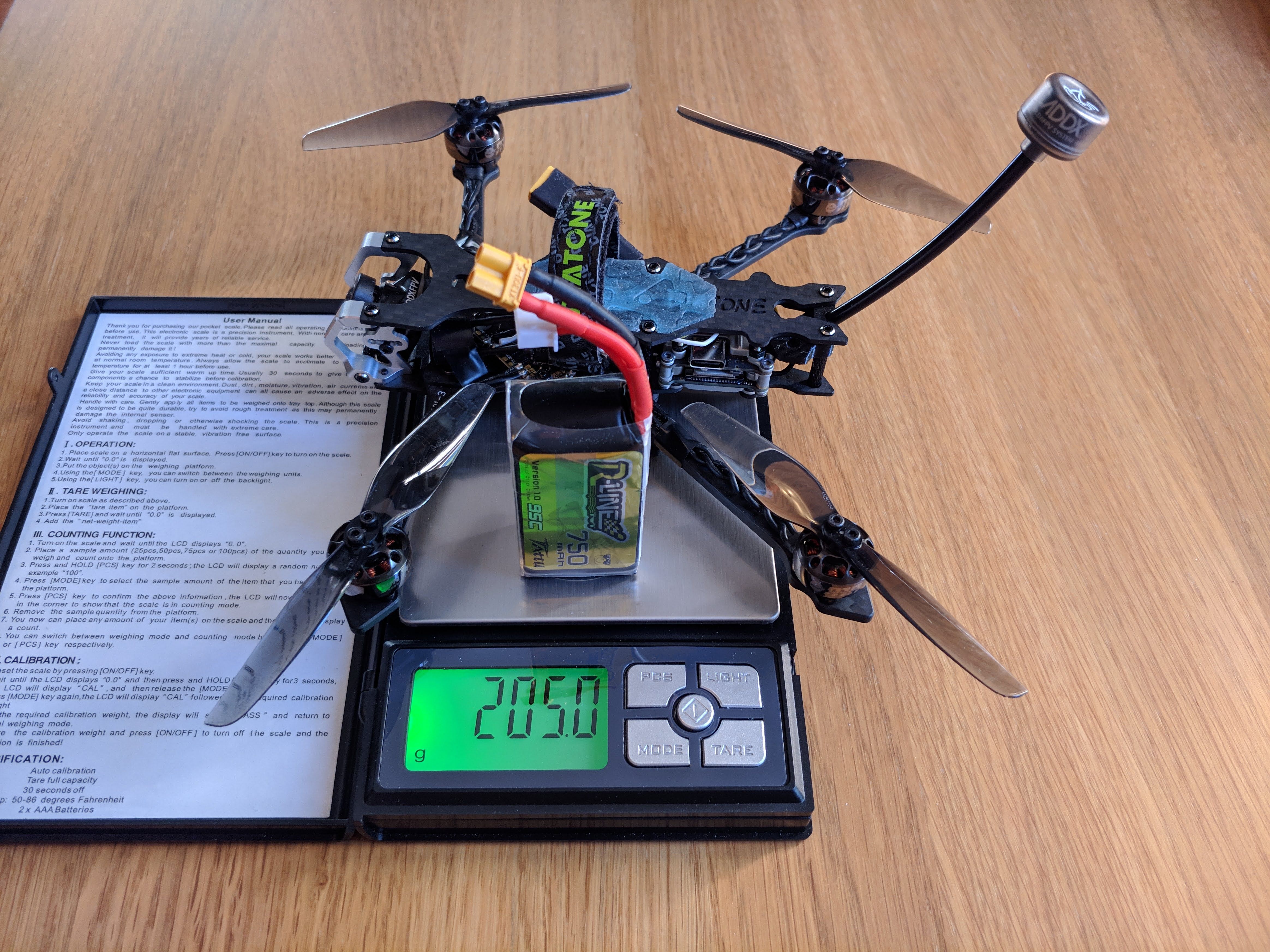
- new quad, 4x2.5x2 prop, new 3S 750mAh battery, 205g AUW: 12:00 min hover
- new quad, 4x2.5x2 prop, new 3S 850mAh battery, 219g AUW: 12:30 min hover
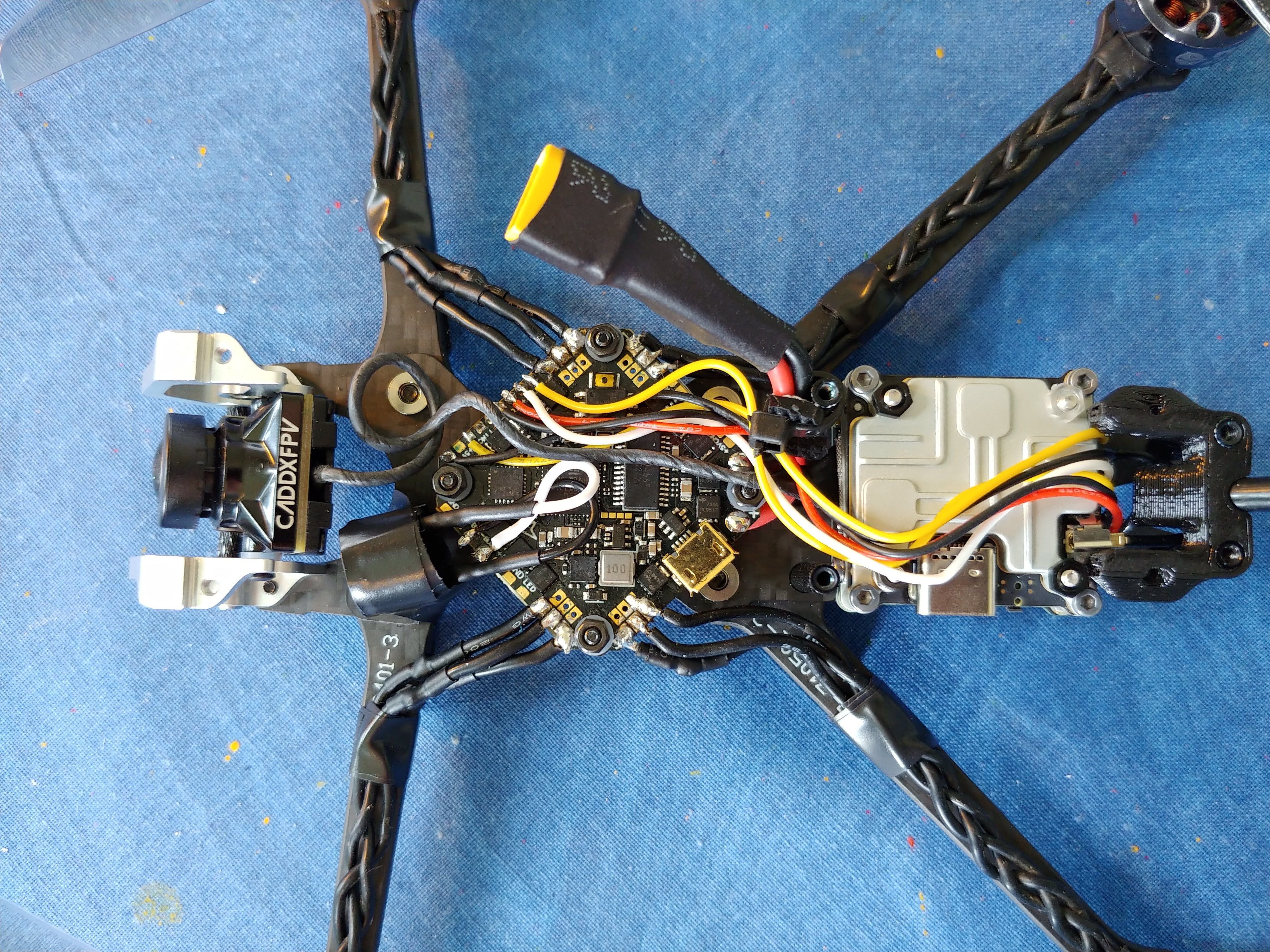
Bad gyro data
I don't know if it is the FC, the build or something else that is wrong but the gyro signal is not good. Only bad gyro data on the pitch axis. Lots of noise in the long and low range 40 to 150 Hz. I have tested different filtering, PID tunes, rearranging wires to not be close to gyro and bending the long antenna to be held down by the battery strap. None has resulted in good gyro data or flight characteristics. It flies ok but not good.
I also tried flashing BLHeli_M (JazzMaverick) and using RPM filtering. The RPM filtering works well as usual, but low frequency noise on pitch does not seems to be directly related to motor frequency and is still there. What's worse is that now the quad sometimes starts with some functionality not working properly. Like does not receive radio signal. Or the Vista not sending any UART/OSD/telemetry data like battery voltage. Or terrible flight performance. The most frustrating part is that it only happens sometimes and sometimes not. I tried lowering the PID loop to 2k with Dshot150 to test if the FC was overloaded, but it did not help. I downgraded to BLHeli_S and have not had this problem yet.
Photos















New Message for Rickard