
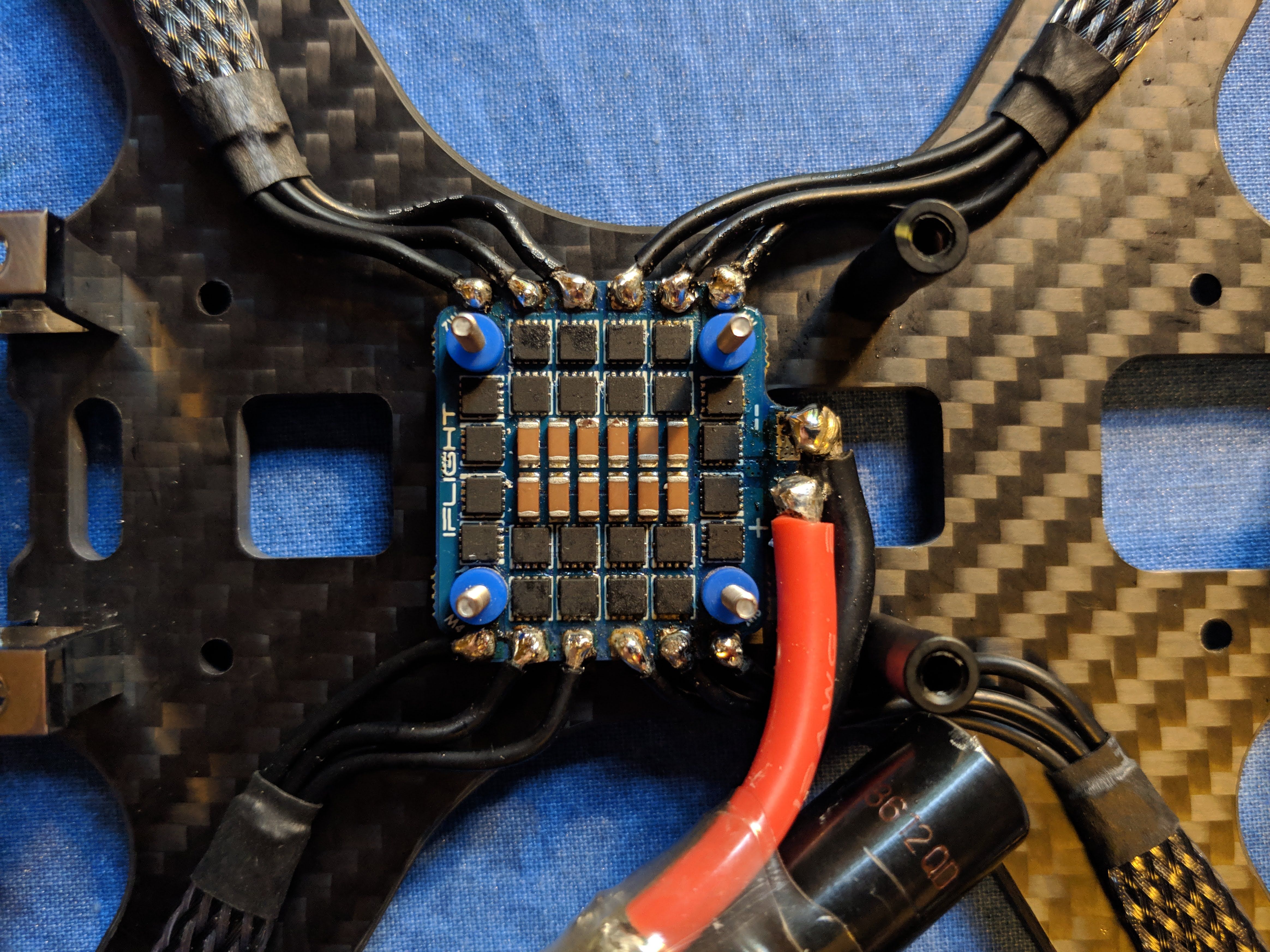
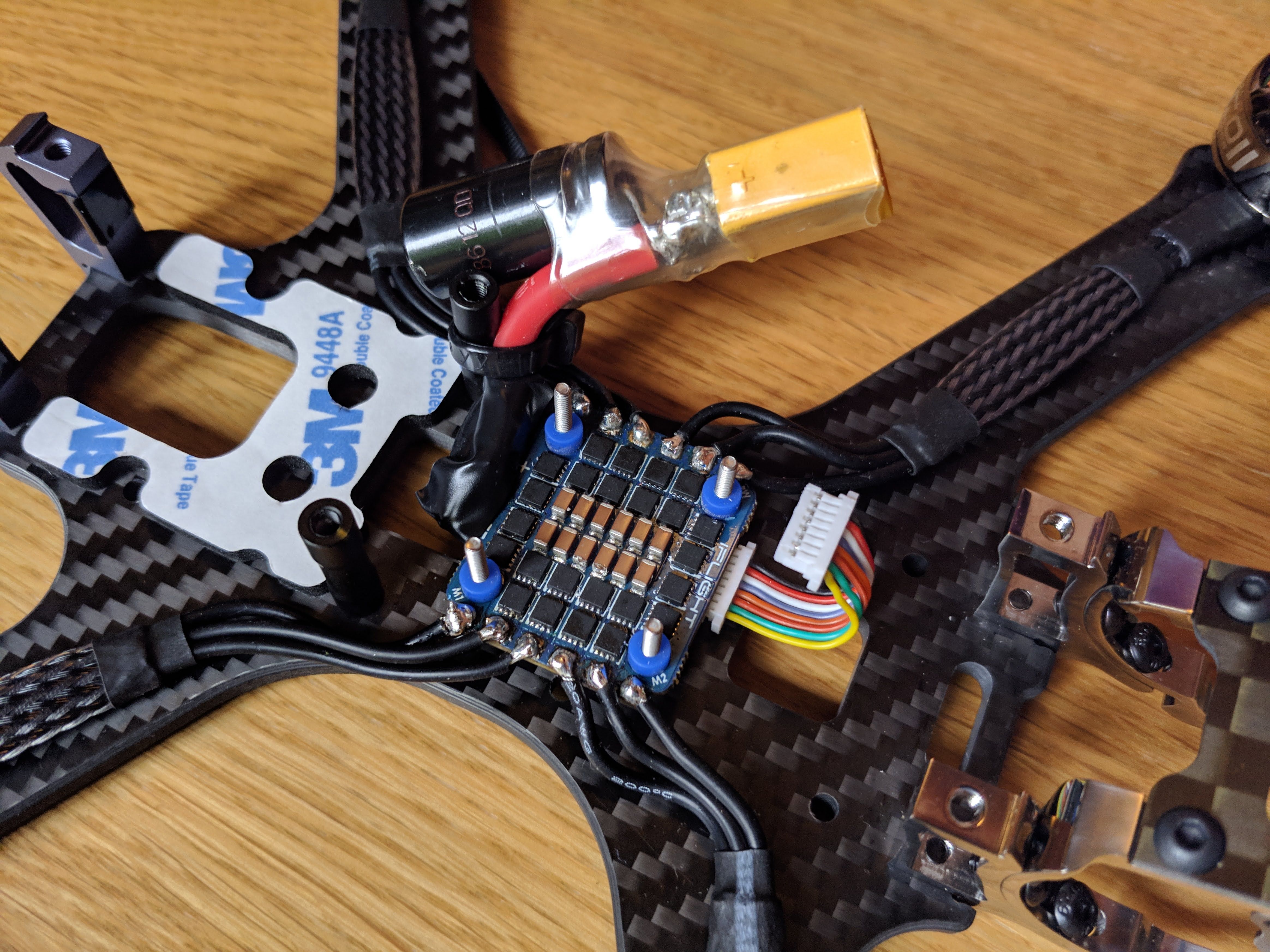
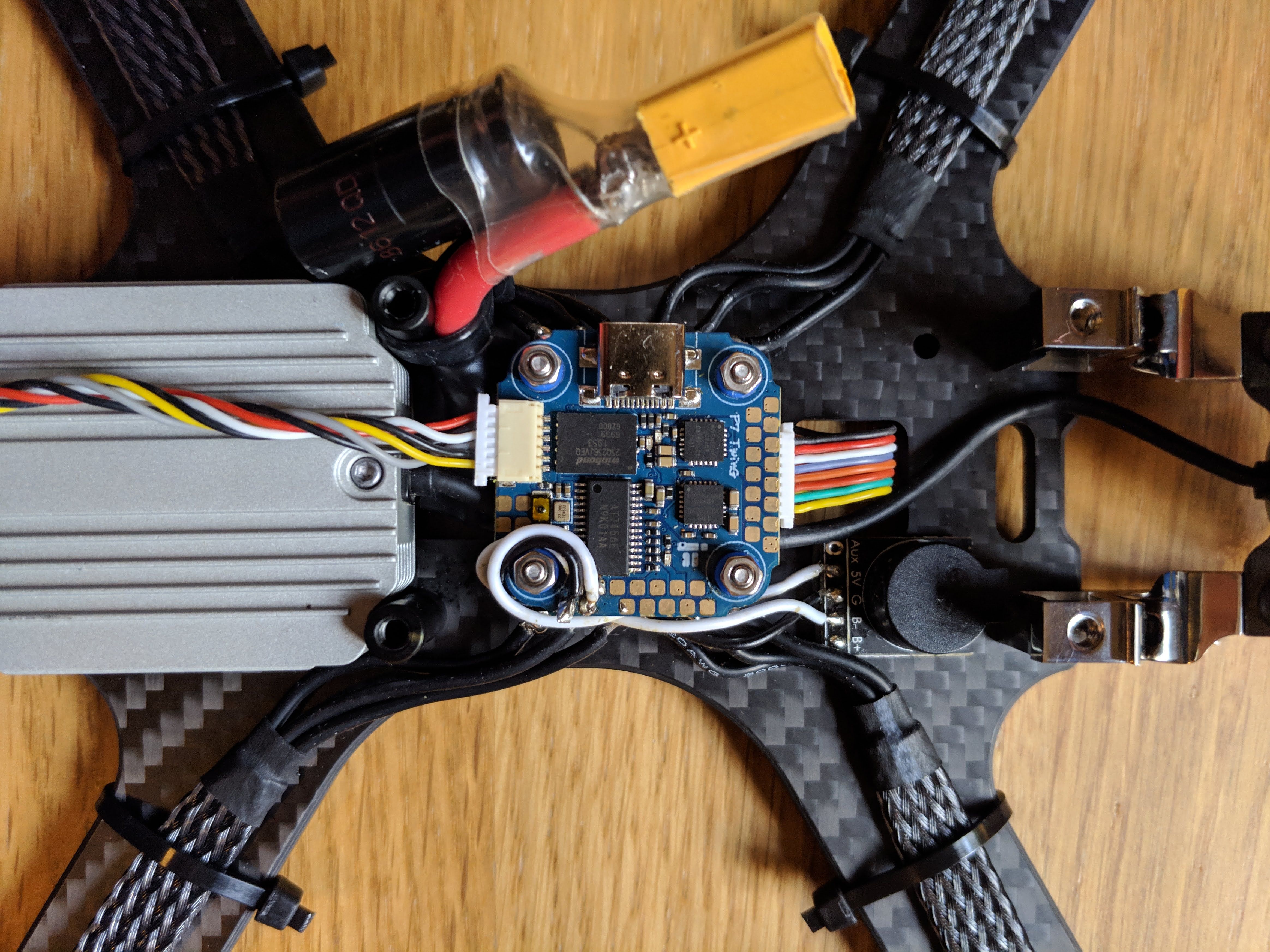
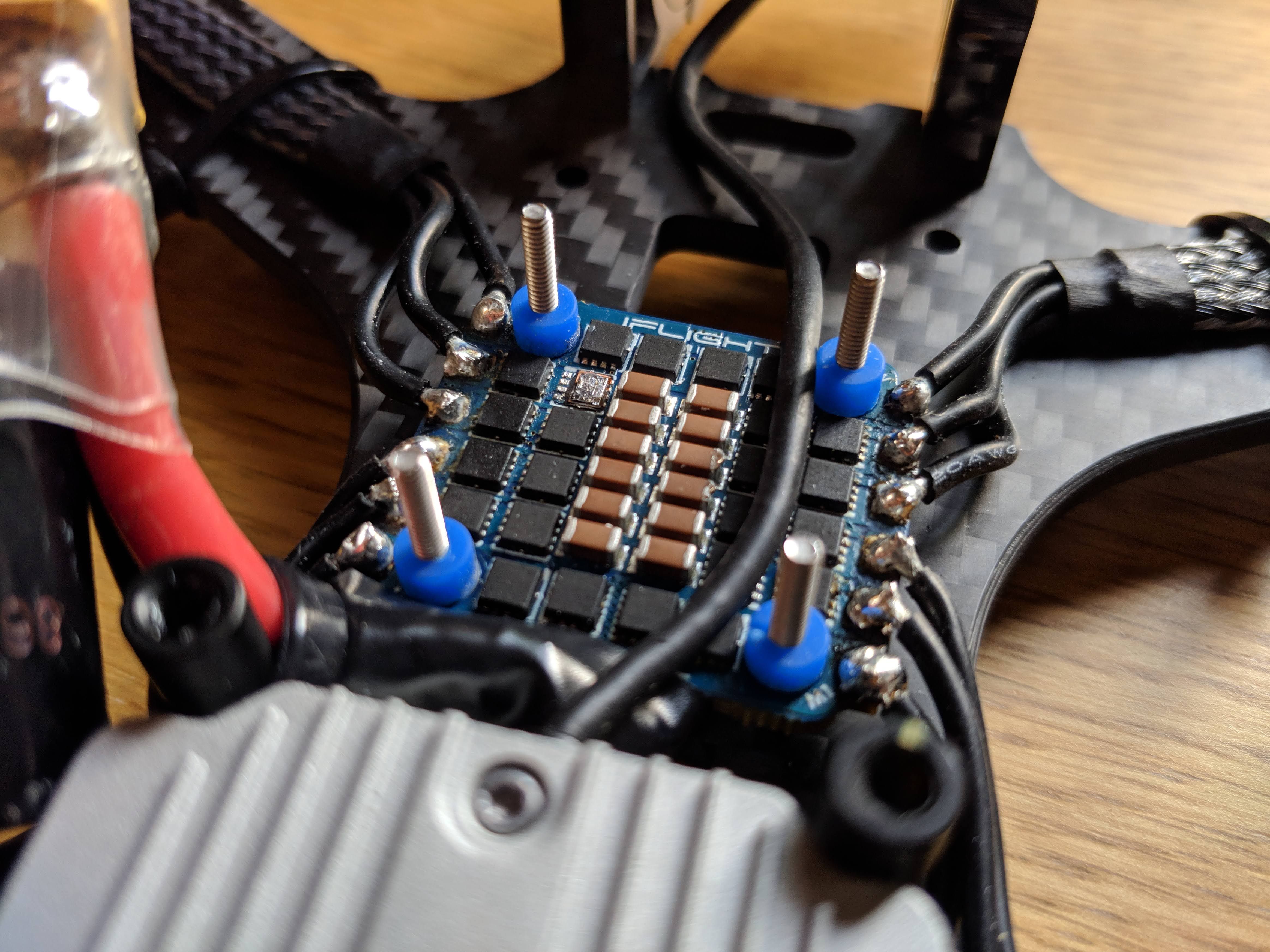
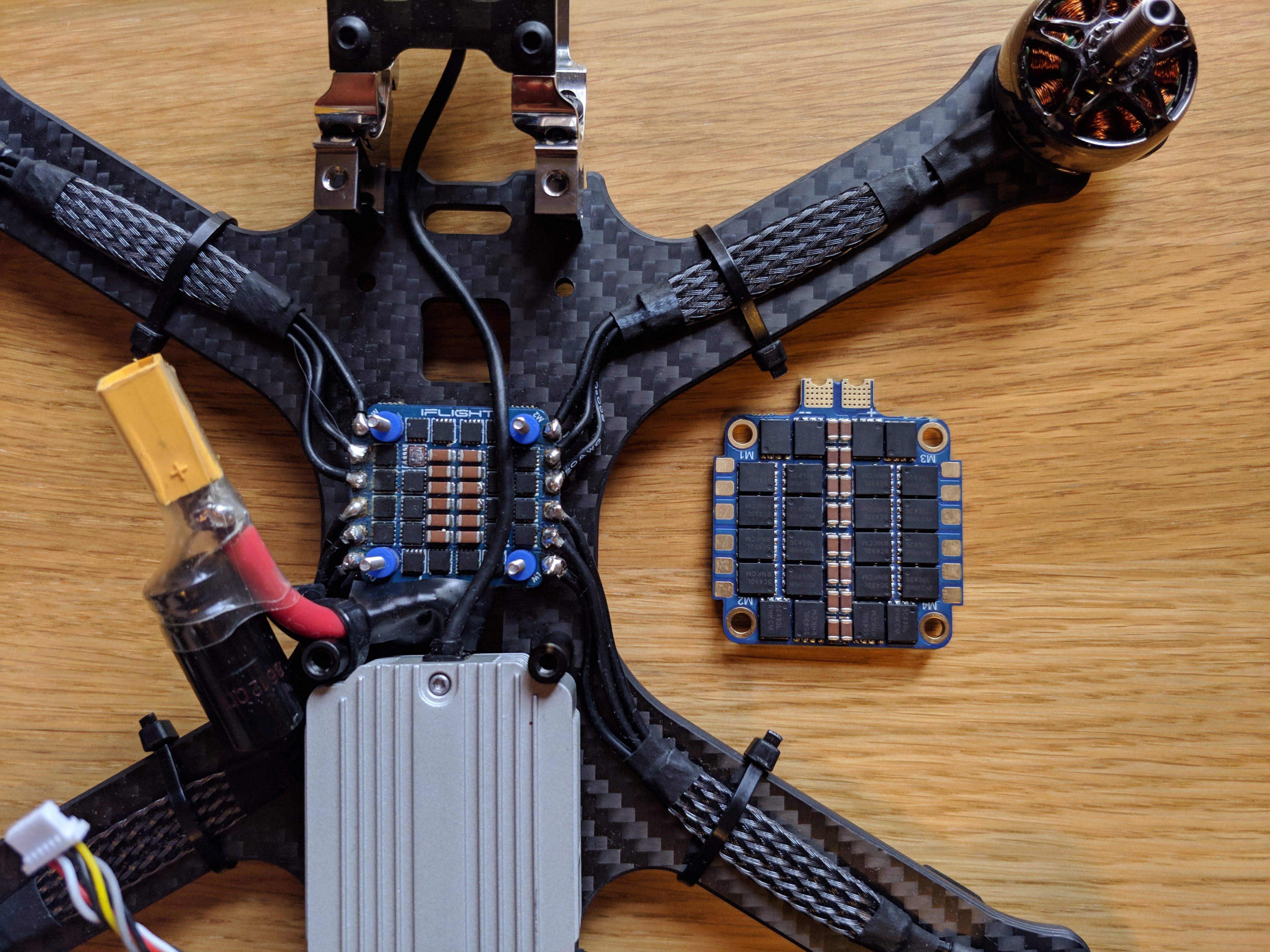
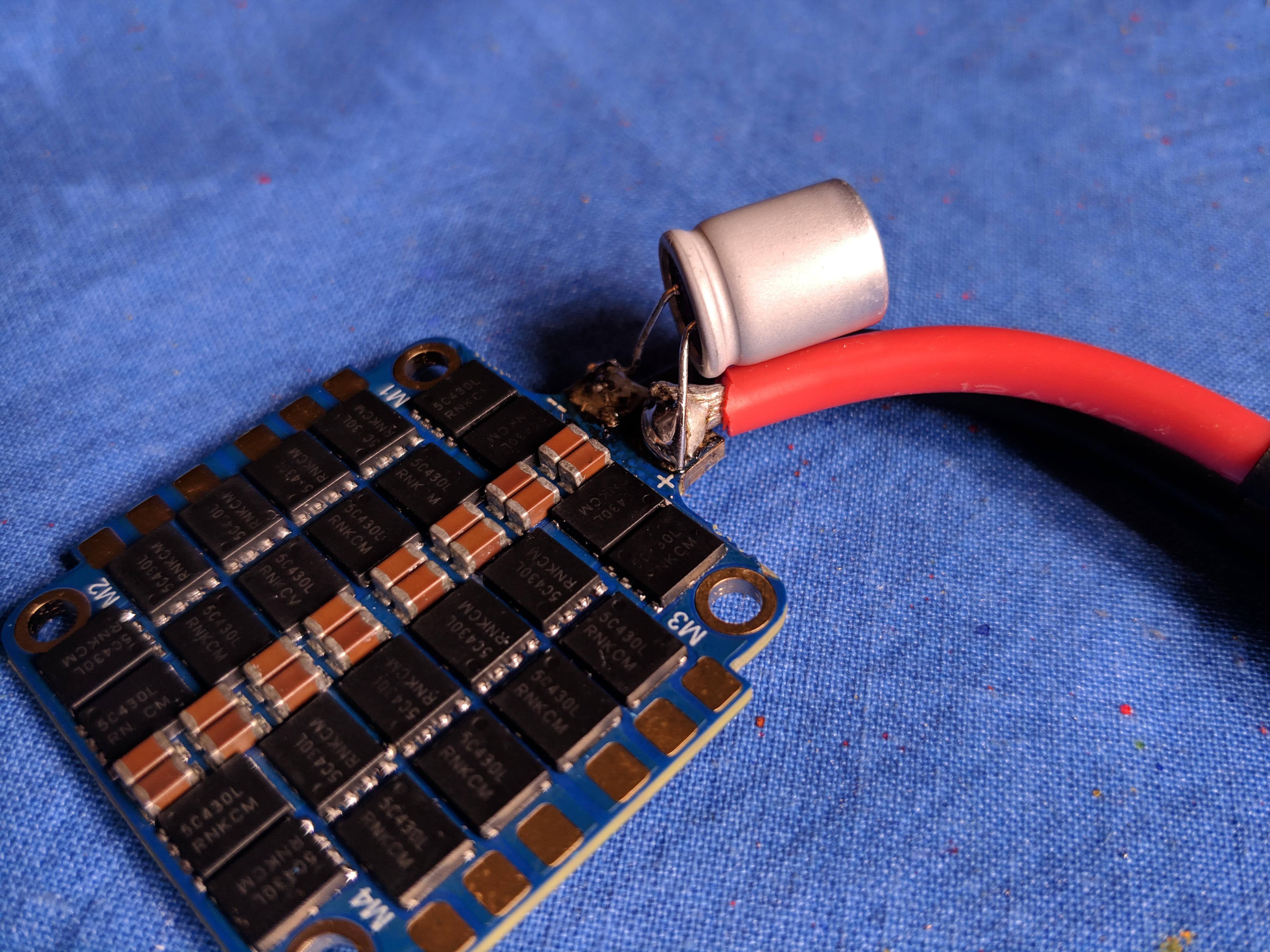
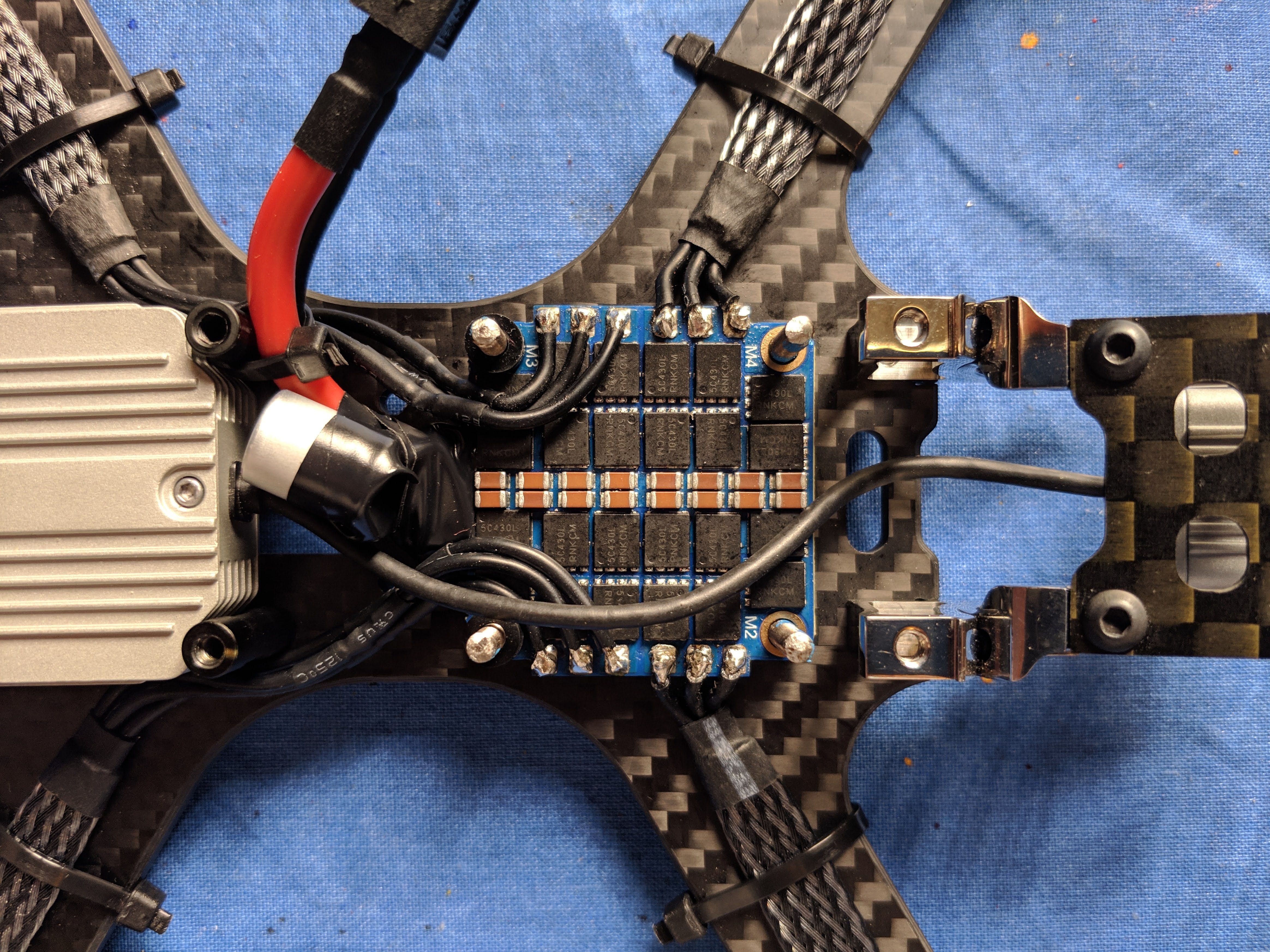
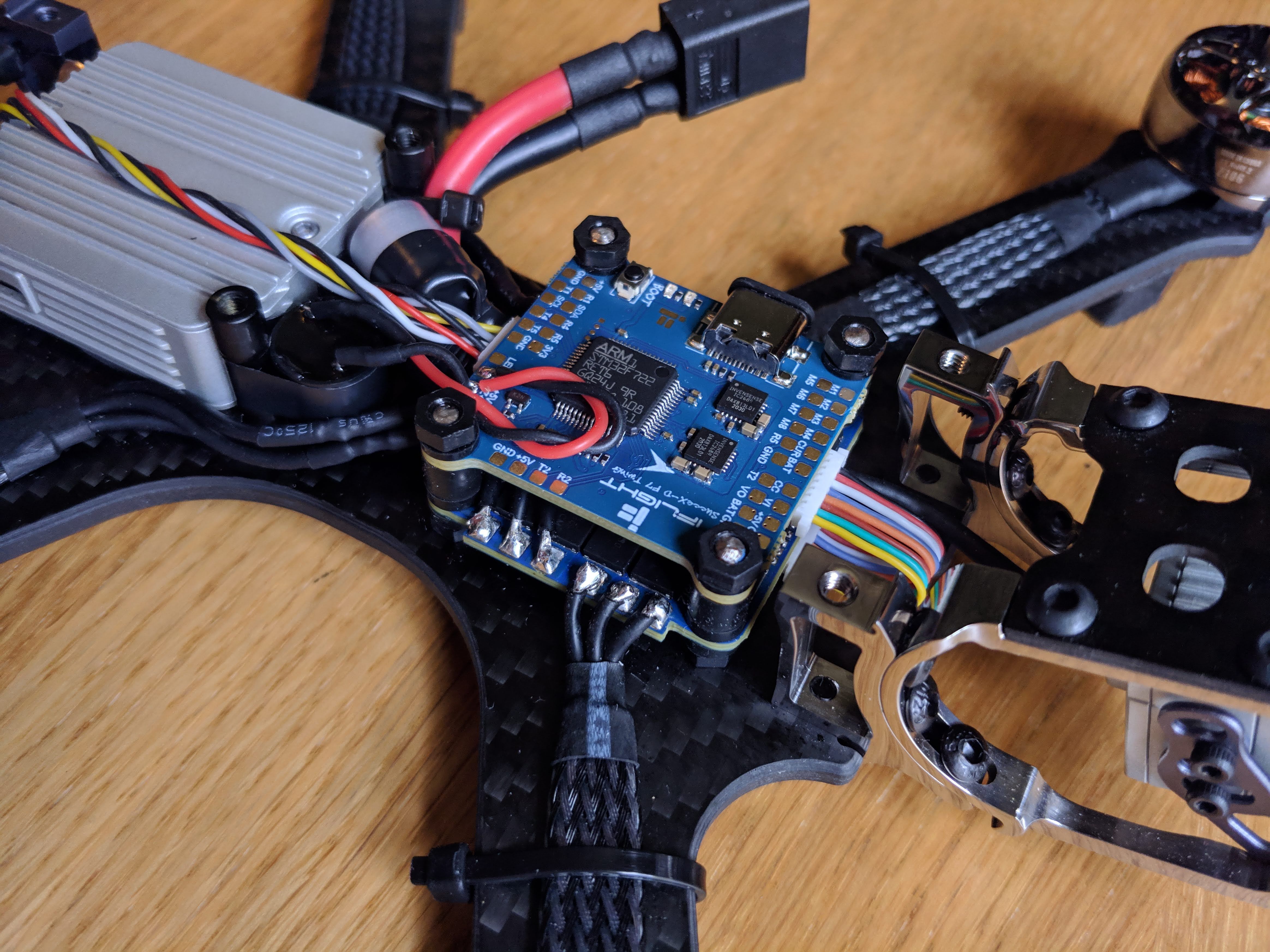
Built this quad using some new parts and some old parts from a 3 inch 4S quad. Old DJI air unit & camera, old FC & ESC with new frame, new 2306 1700KV motors and some 6S batteries. The 40A 20x20 ESC did break after only a few flights. The blackbox data showed really noisy/spiky gyro signals right when the ESC broke, which could have been causing extra stress on the ESC. Switched out the 4in1 ESC to a larger 30x30 50A ESC, also 4in1, which has held for many flights. (The Marmotte frame has 20x20 mounting holes, but they are M3 size.)
The quad suffered from mid throttle oscillations. Around 45% to 50% throttle the gyro signal was very noisy and the quad would shake (notable through the FPV feed). At both low and high throttle, the quad flew fine with smooth gyro signals. Increasing the ESC PWM frequency from 24kHz to 48kHz completely removed the mid throttle oscillations and extra noise to the gyro. Better gyro signal at all throttle levels allowed for more aggressive tune and now the quad flies great.
I wanted to use the FPVCycle Imperial motors, but since they were out of stock I went with Emax ECO II instead. The look of the ECO II fit well with the Marmotte.
Mounting the GoPro with only a Ummagrip and a strap is not the best method, but it is simple, easy to remove and works ok.
Photos


















New Message for Rickard