GEPRC CineLog 25 HD - De-Cased Caddx Vista w/ Nebula Pro Nano & Naked GoPro 7 - BlueJay
 By wrong17 on Aug 21, 2021
By wrong17 on Aug 21, 2021
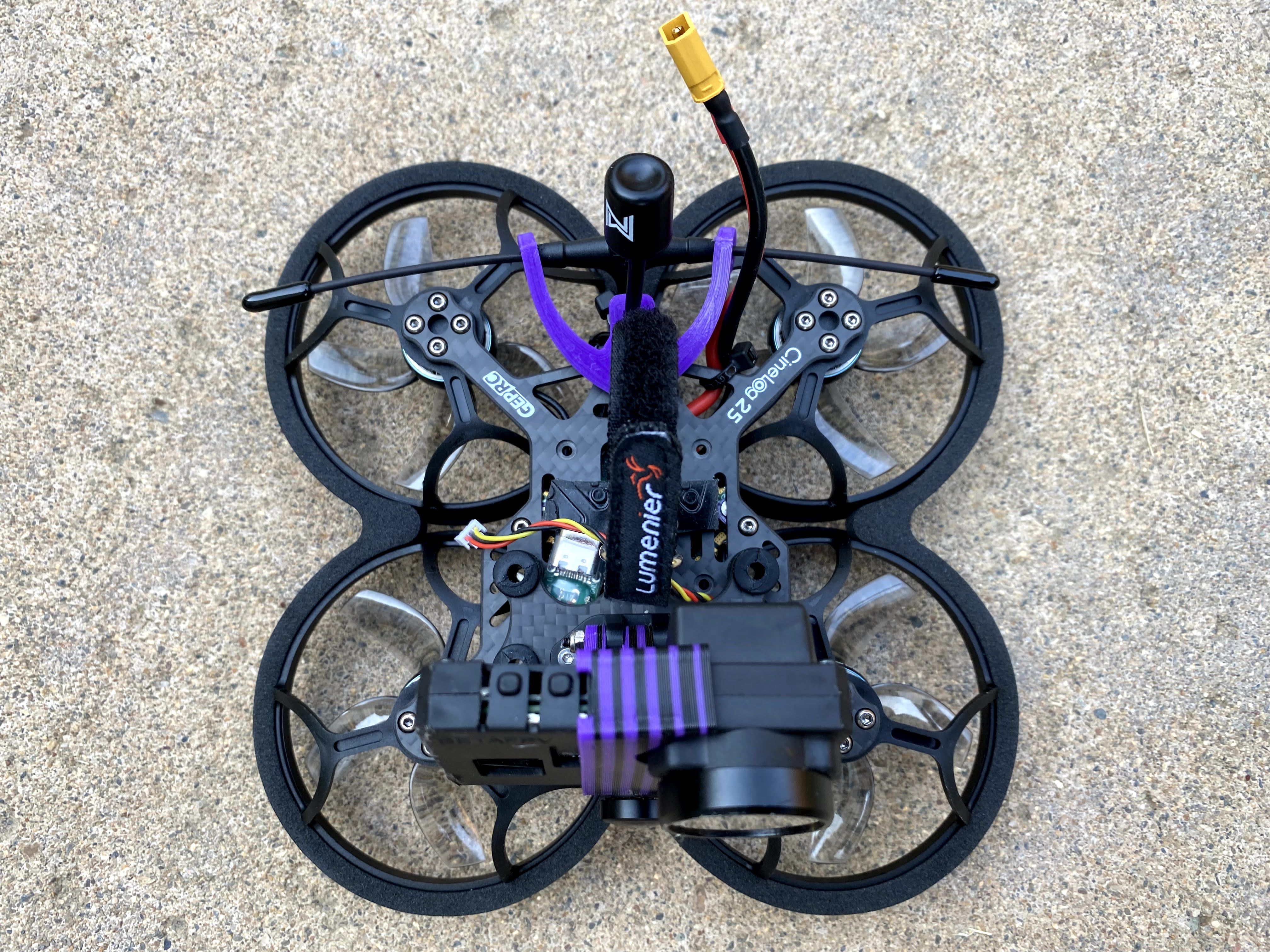
The BetaFPV 95X v3 build was my finial attempt with a 2.5” pusher quad, but my friend kept raving about the GEPRC Cinelog 25. Here I go again, building another one. Typically, I do not get BNF quads because I enjoy build a quad from scratch; plus, I like to put my personal touch to every quad. I do not want my quad to look like everyone else’s, so I want it to be different.
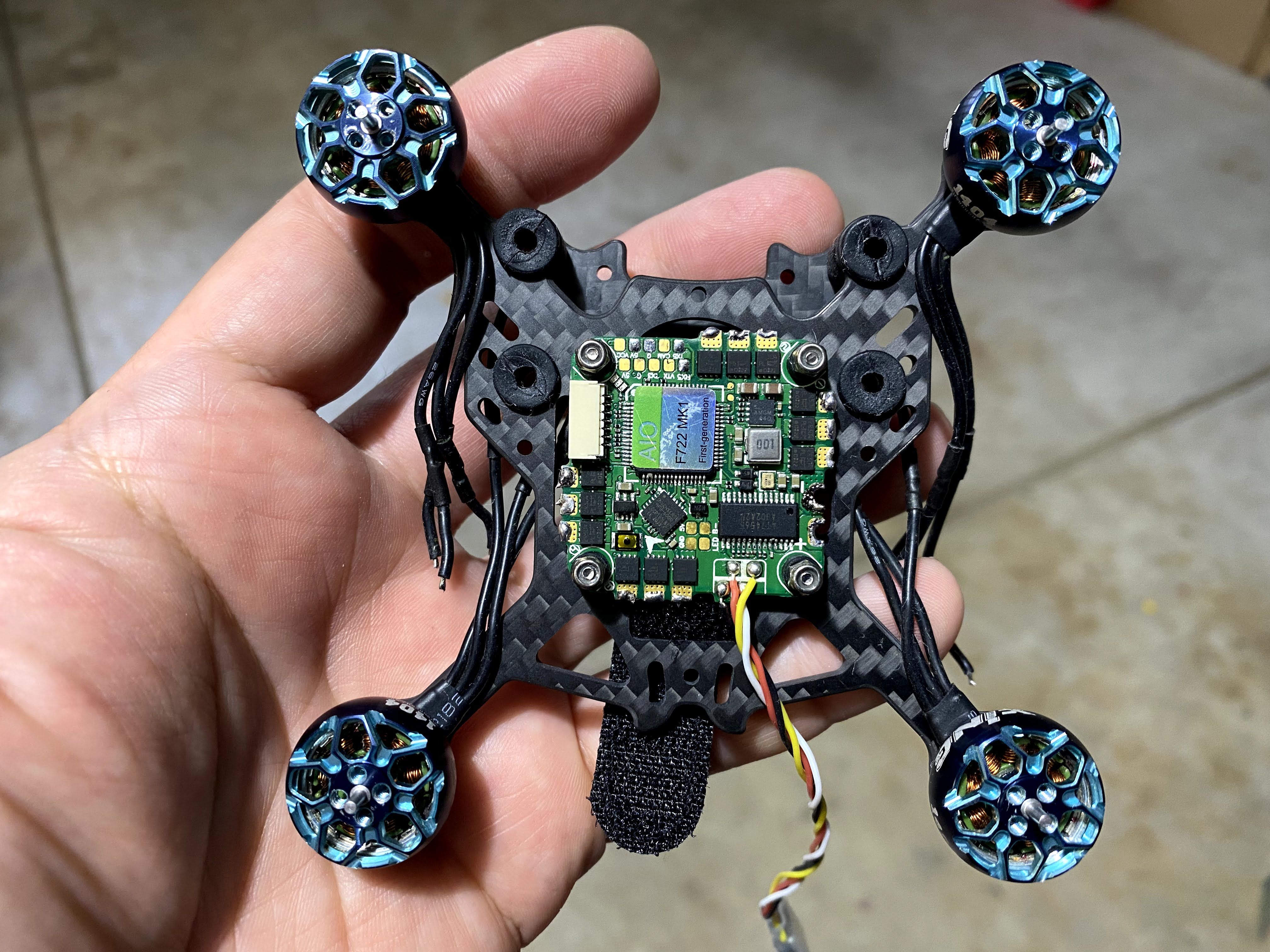
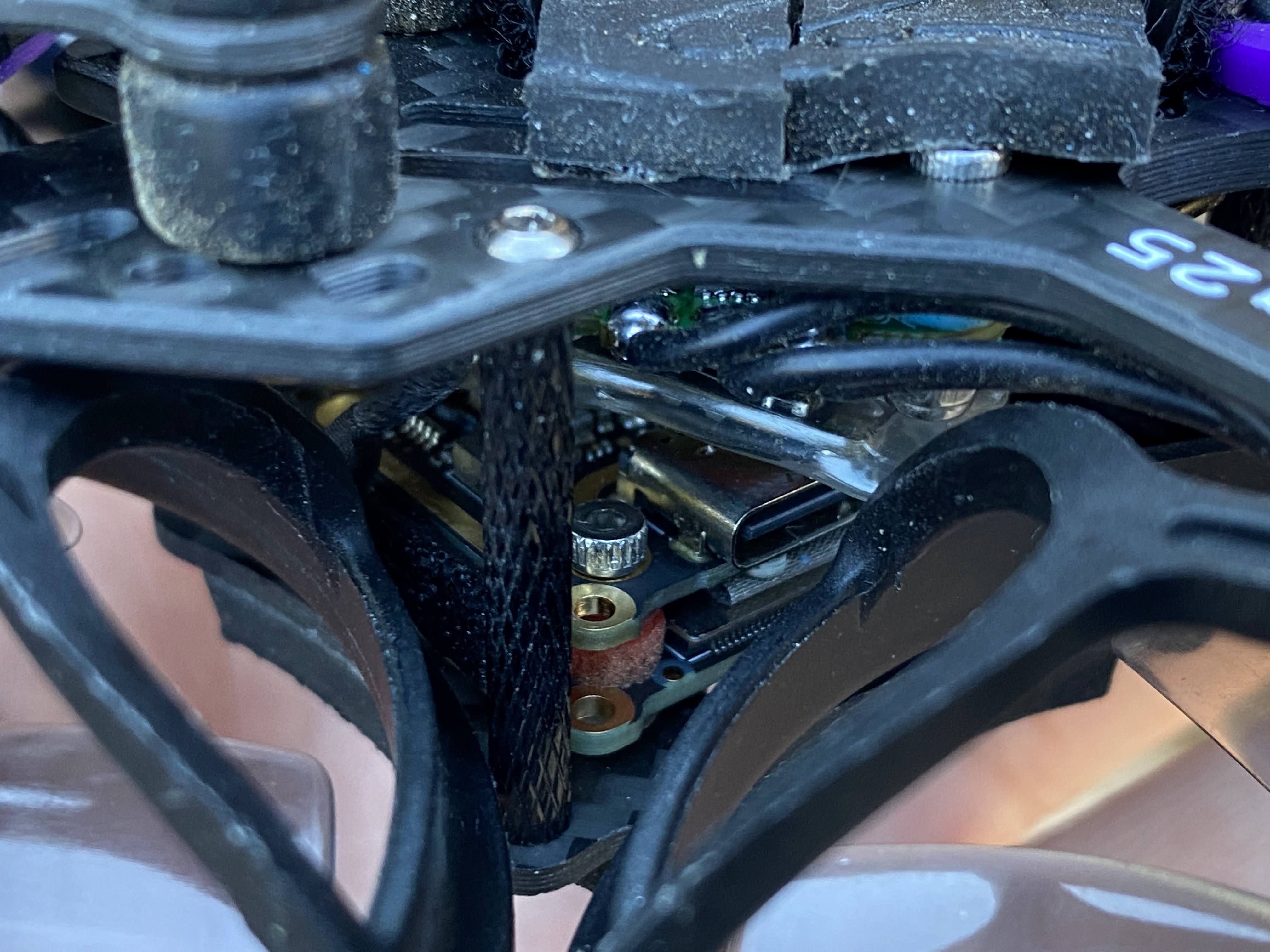
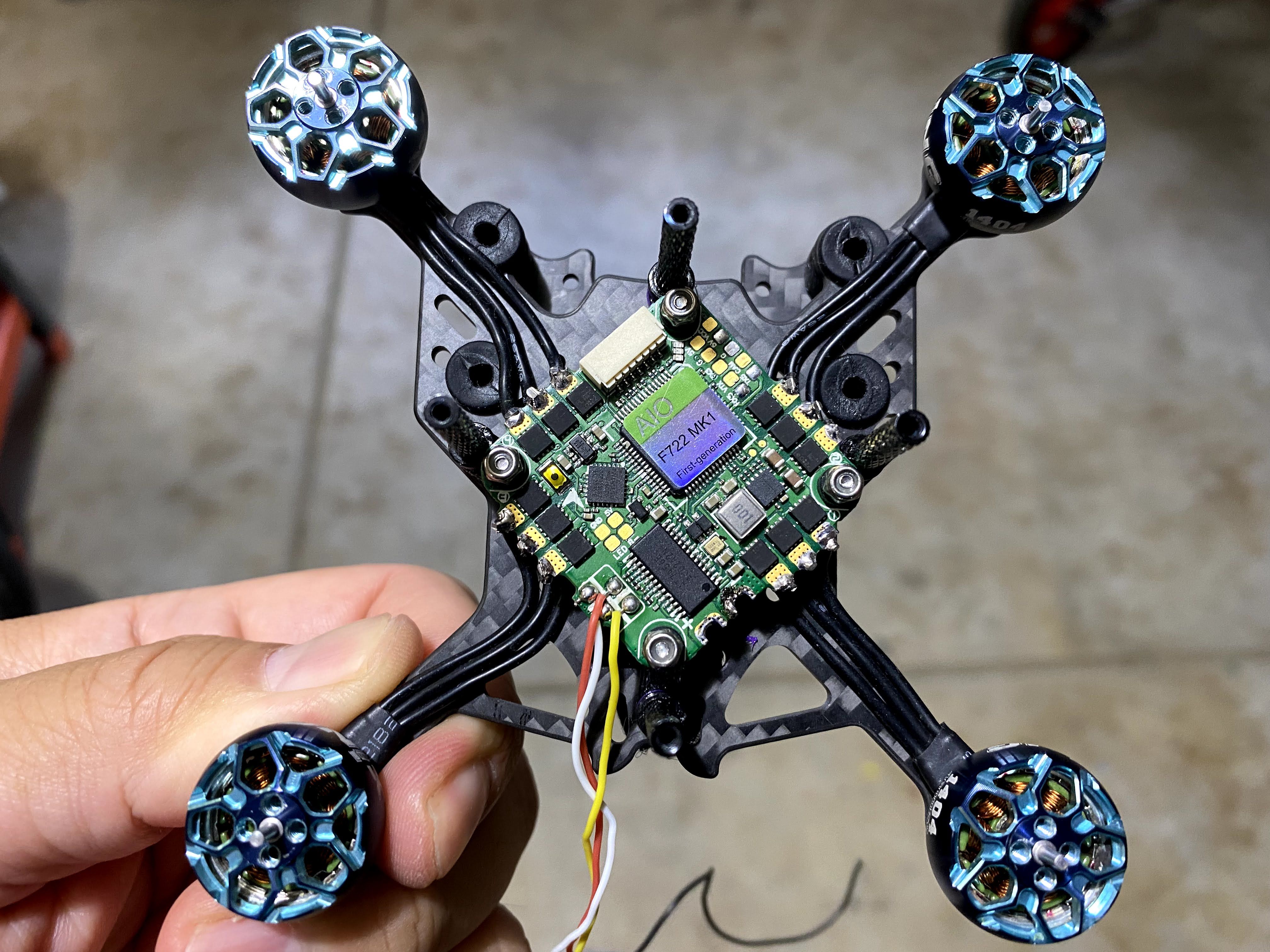
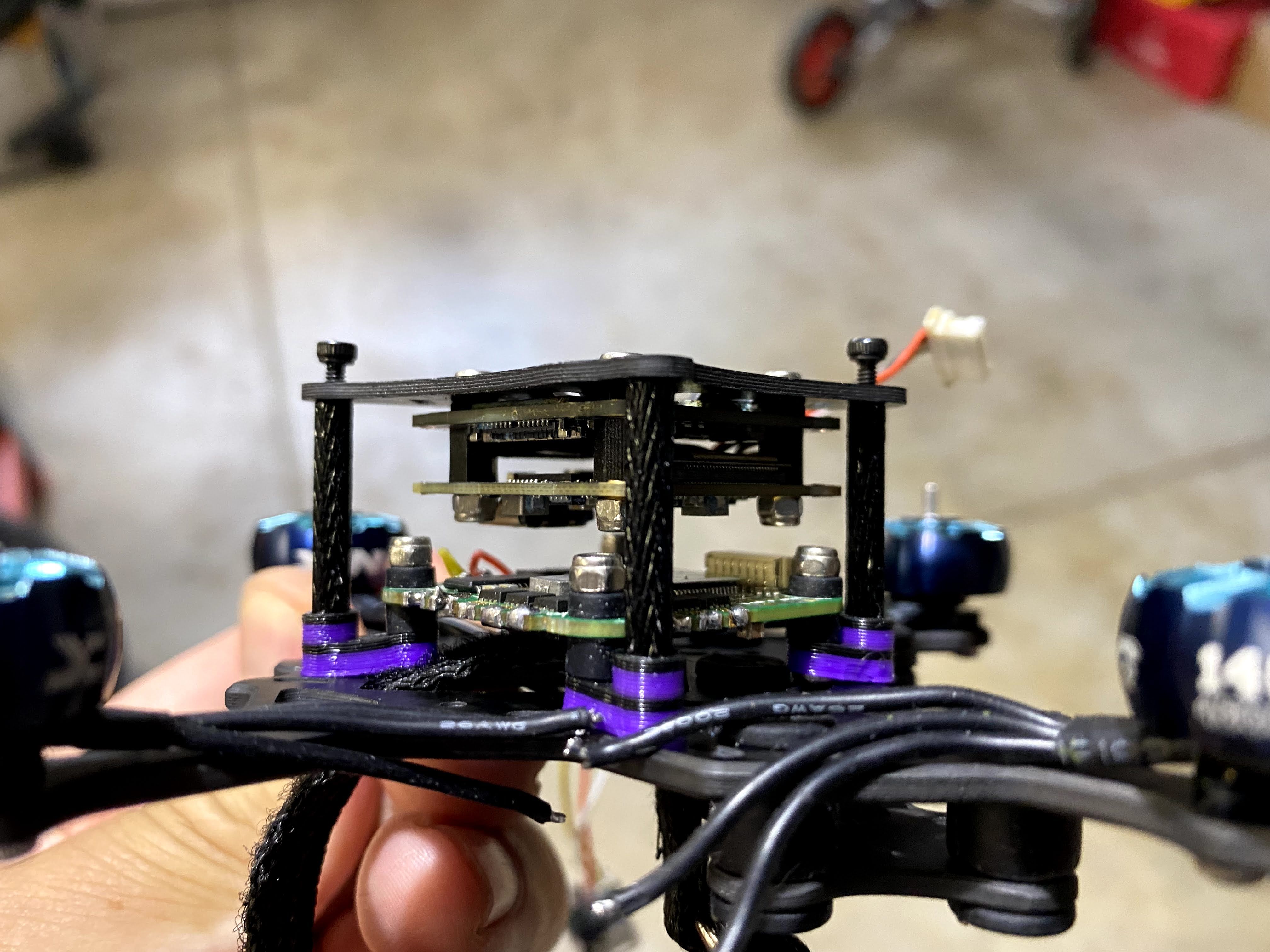
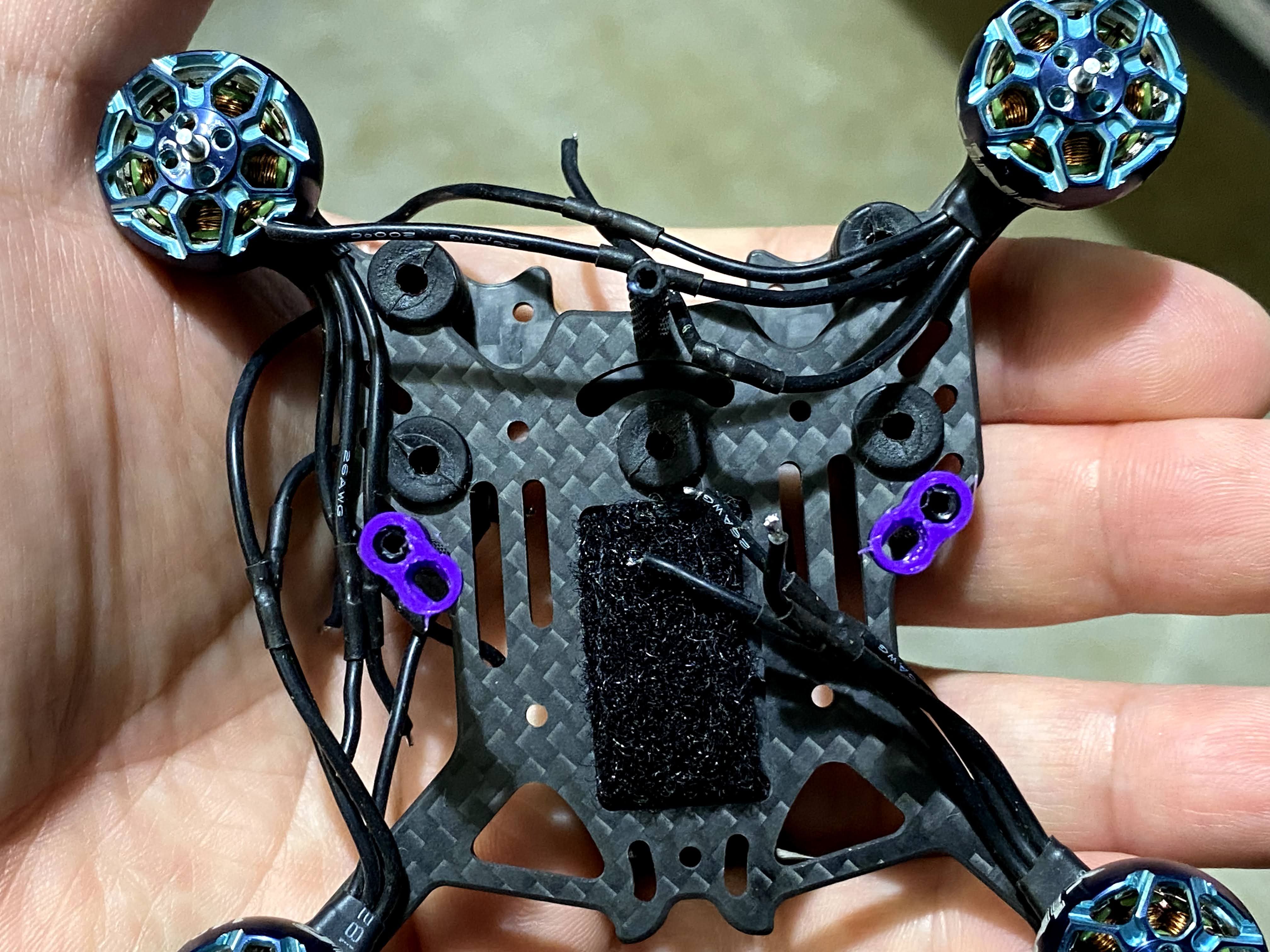
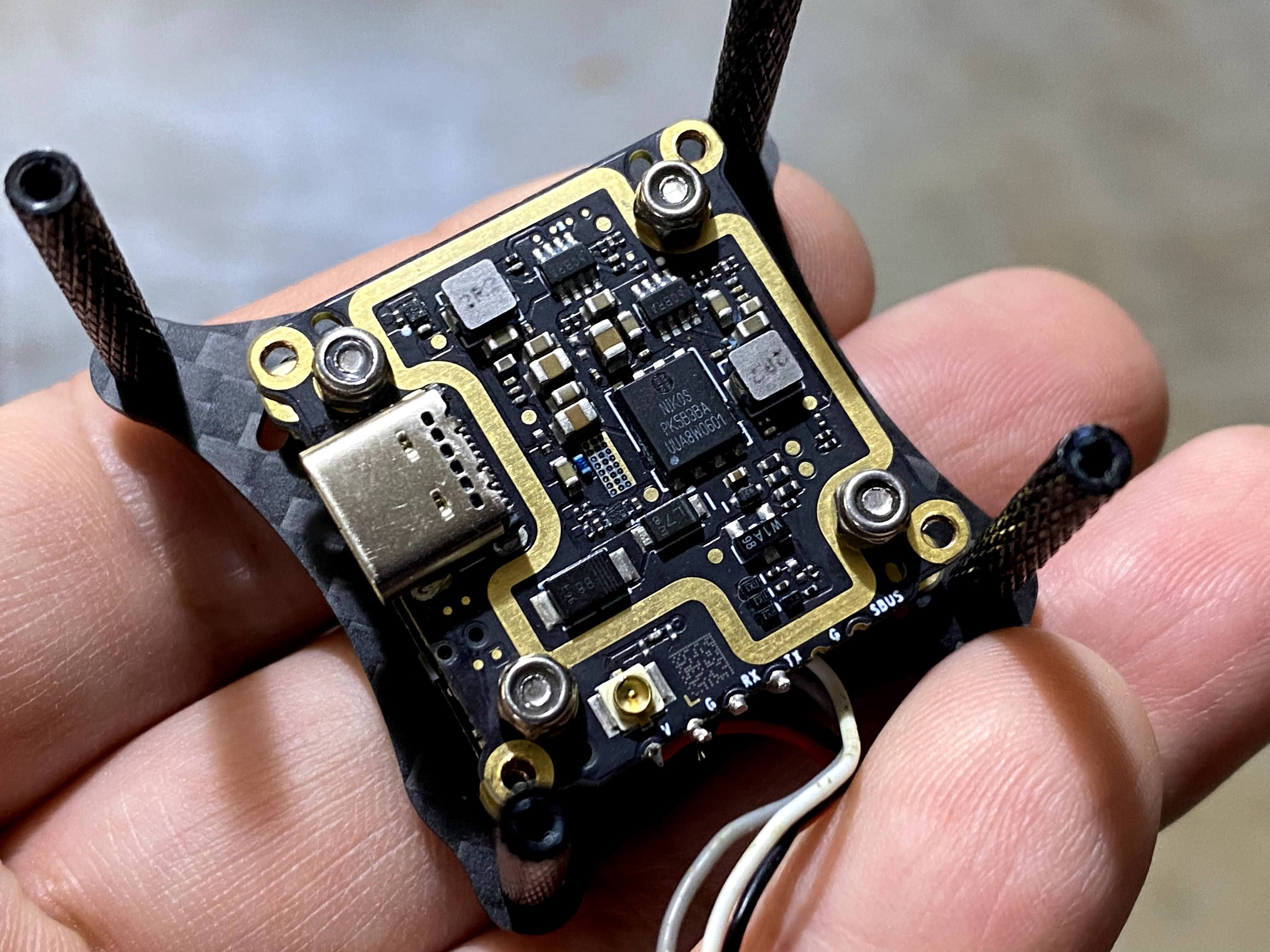
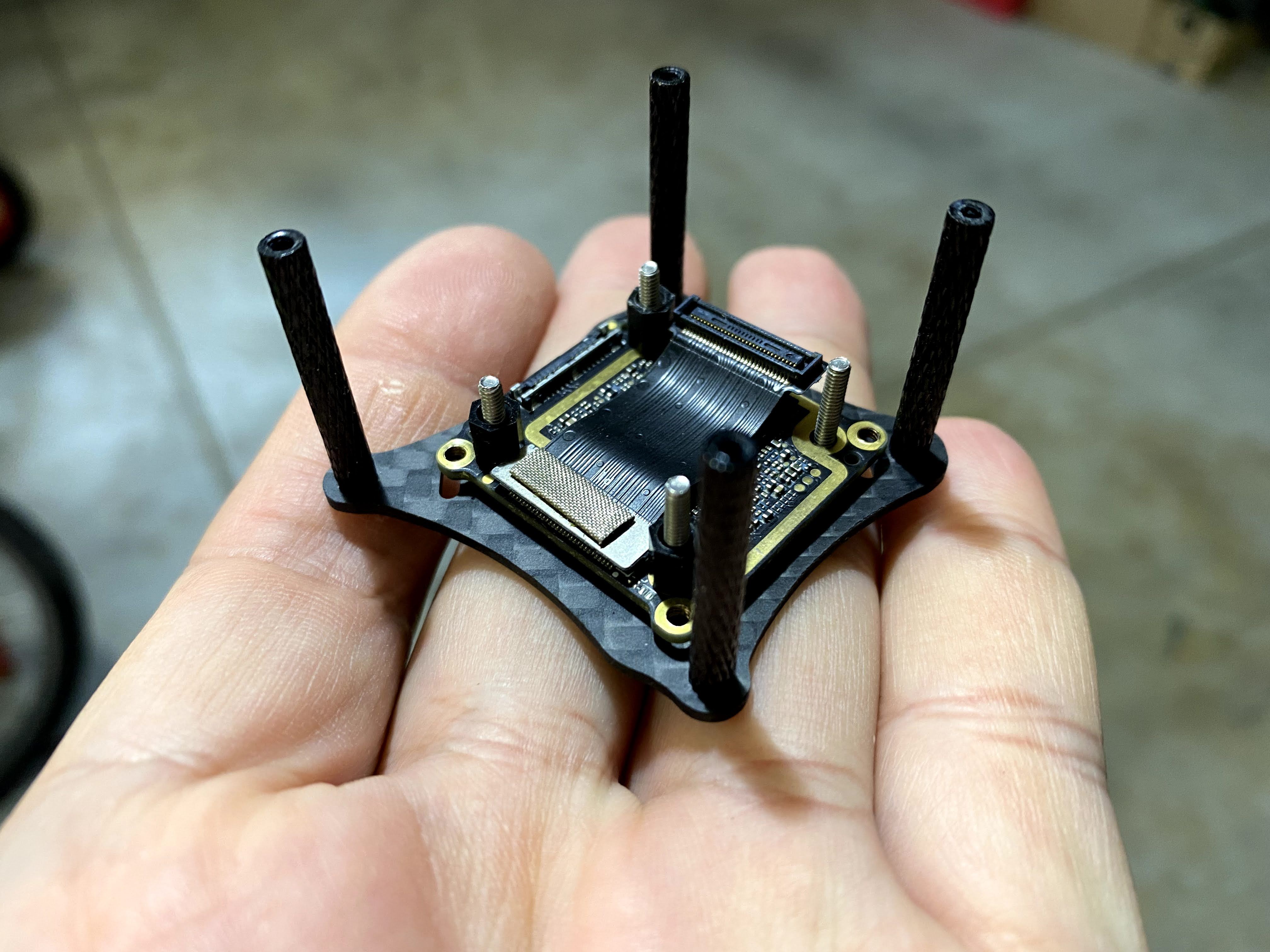
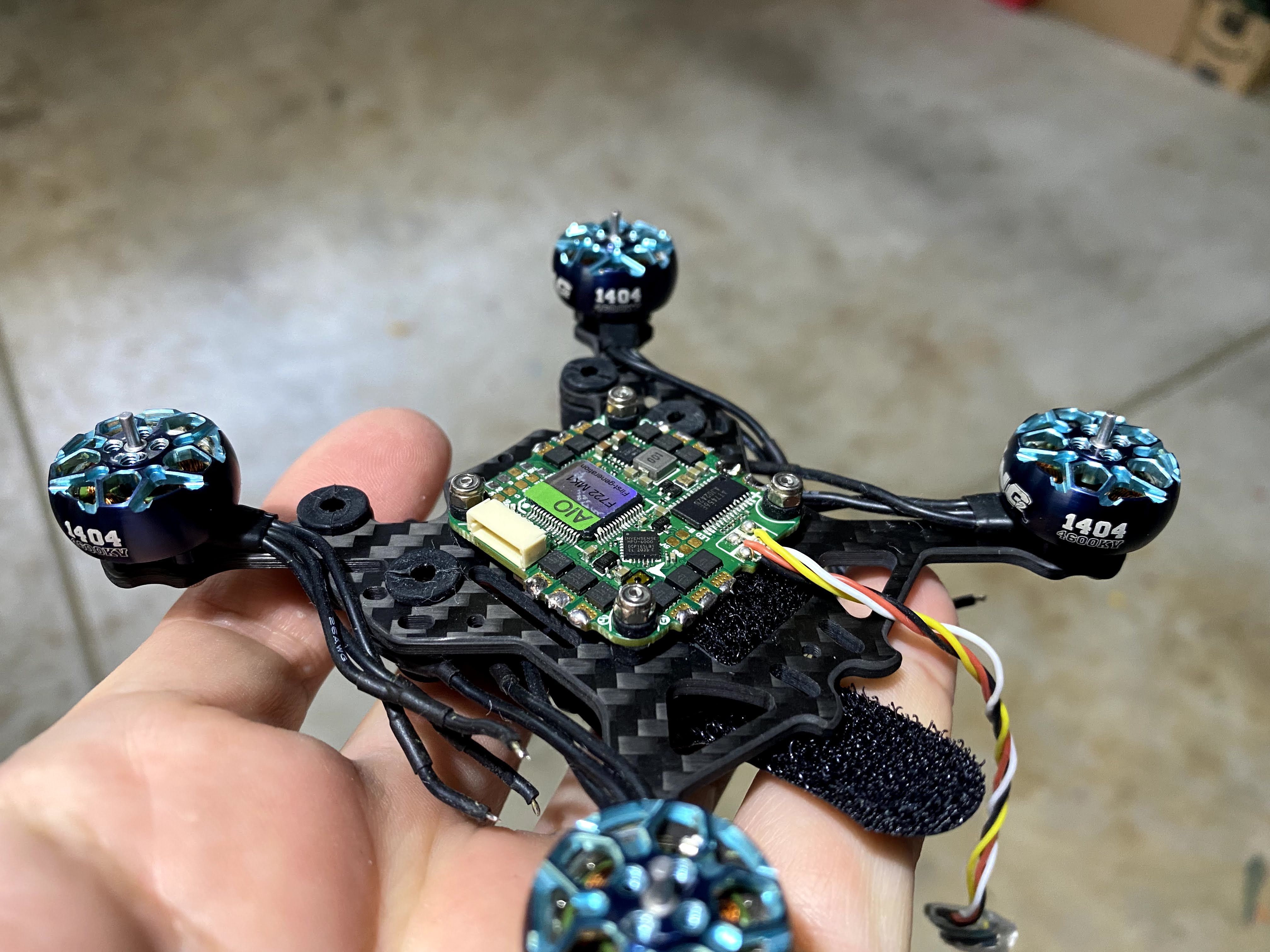
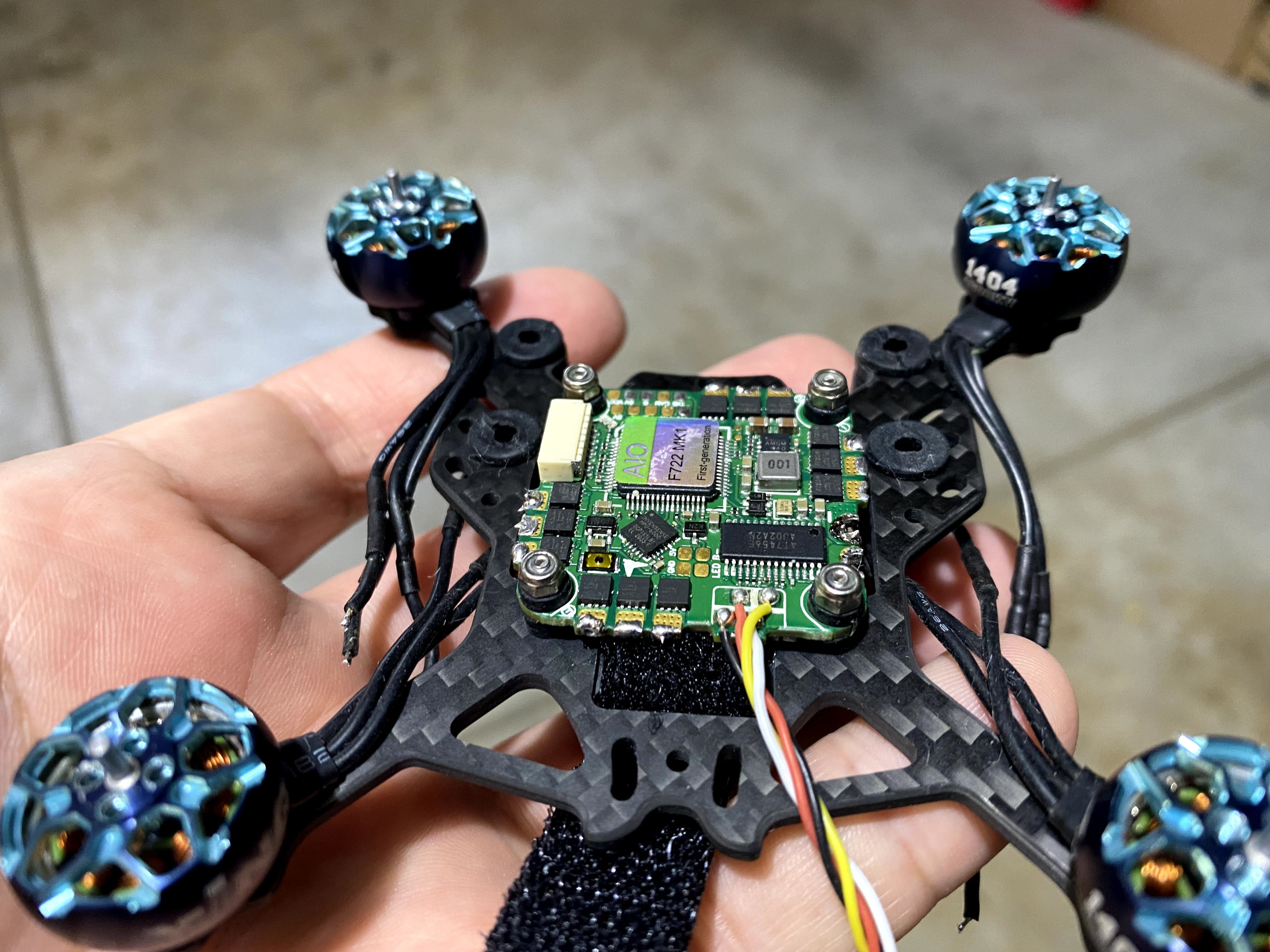
As I start to build the quad, I am kind of surprised how this frame rotates the whoops style AIO board 45 degree, so it will sit like a square and not the typical diamond. This configuration did not sit well with me because the motors wires will not be symmetrical.
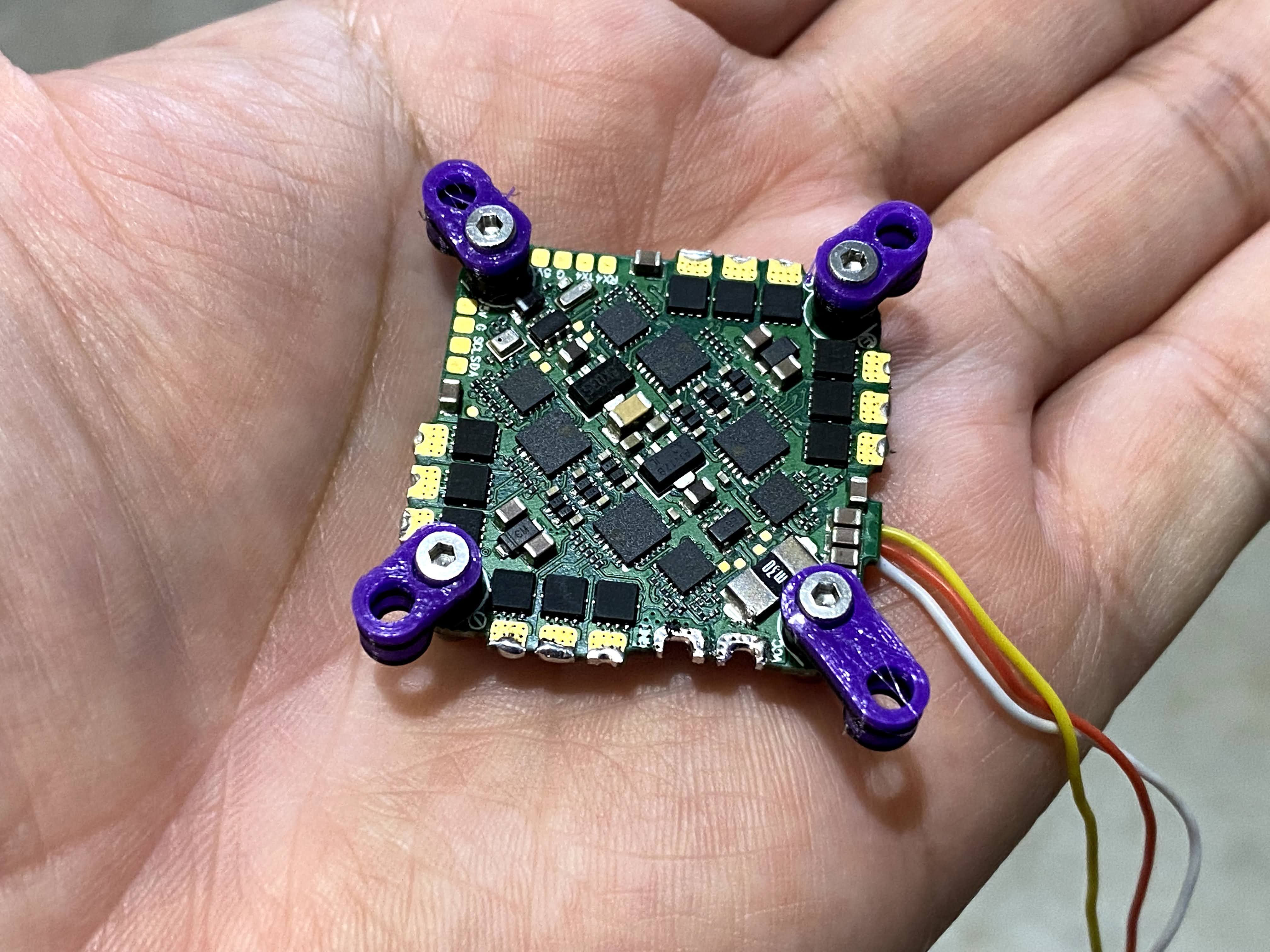
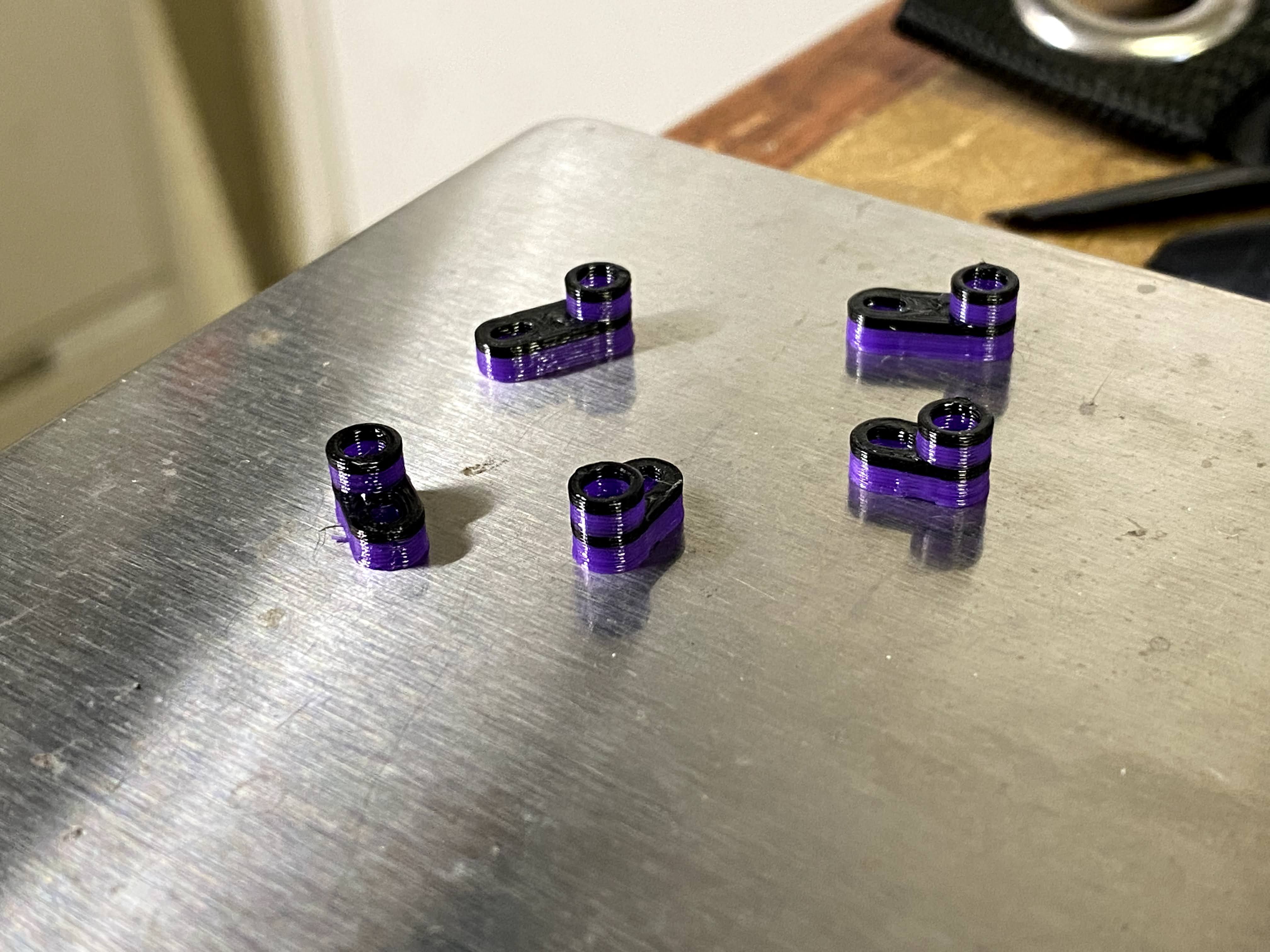
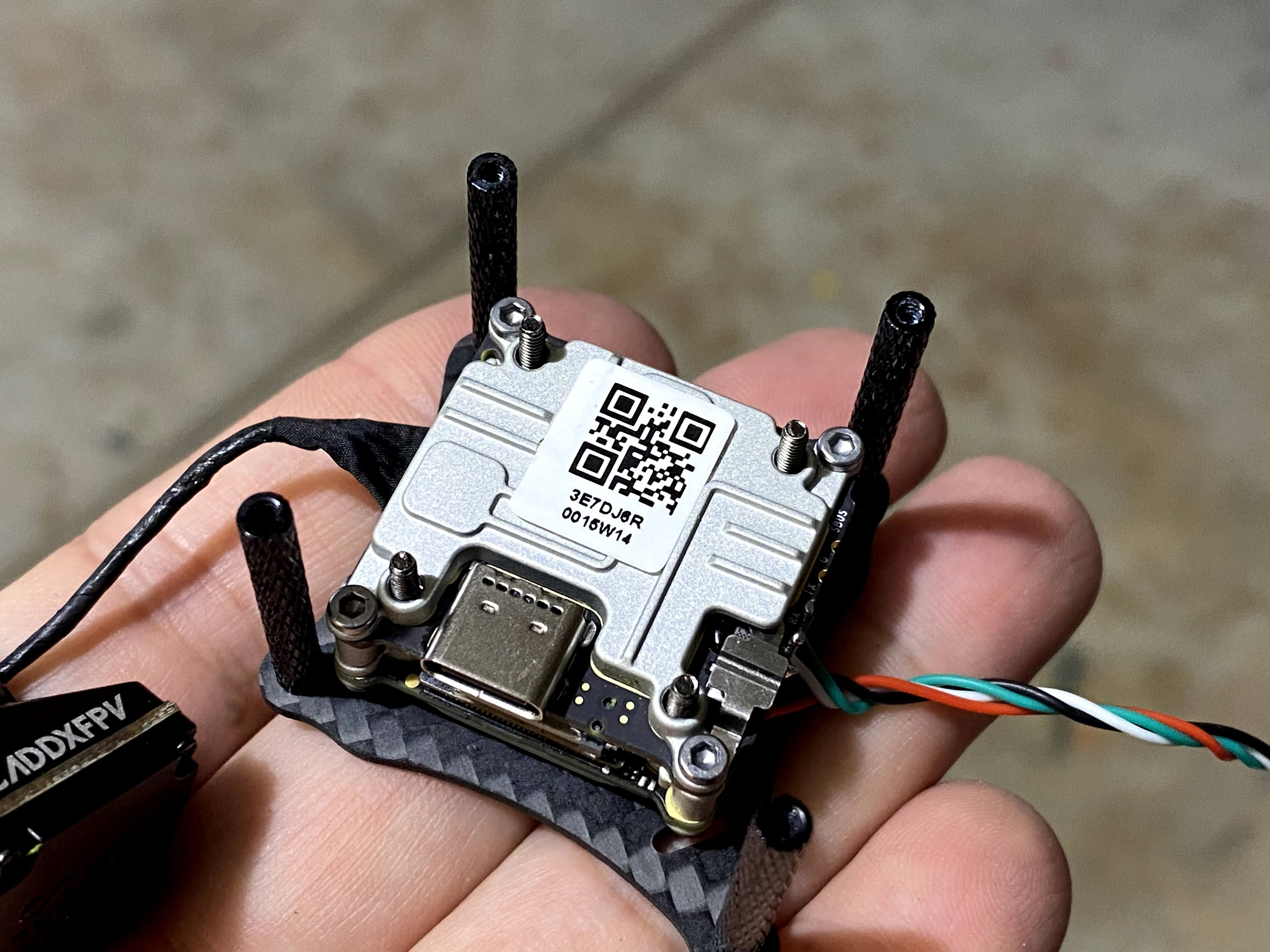
My buddy who is also building this same quad did not like this layout either, so he came up with this mount reposition the FC to a diamond. Regardless how you position the FC, it will be a pain in the a$$ to access the USB ports unless you have a AIO whoop board that has an external USB board. The same goes with the Caddx air unit, there is no easy way to access the USB or bind button. You will need to remove a duct to get to the USB port.
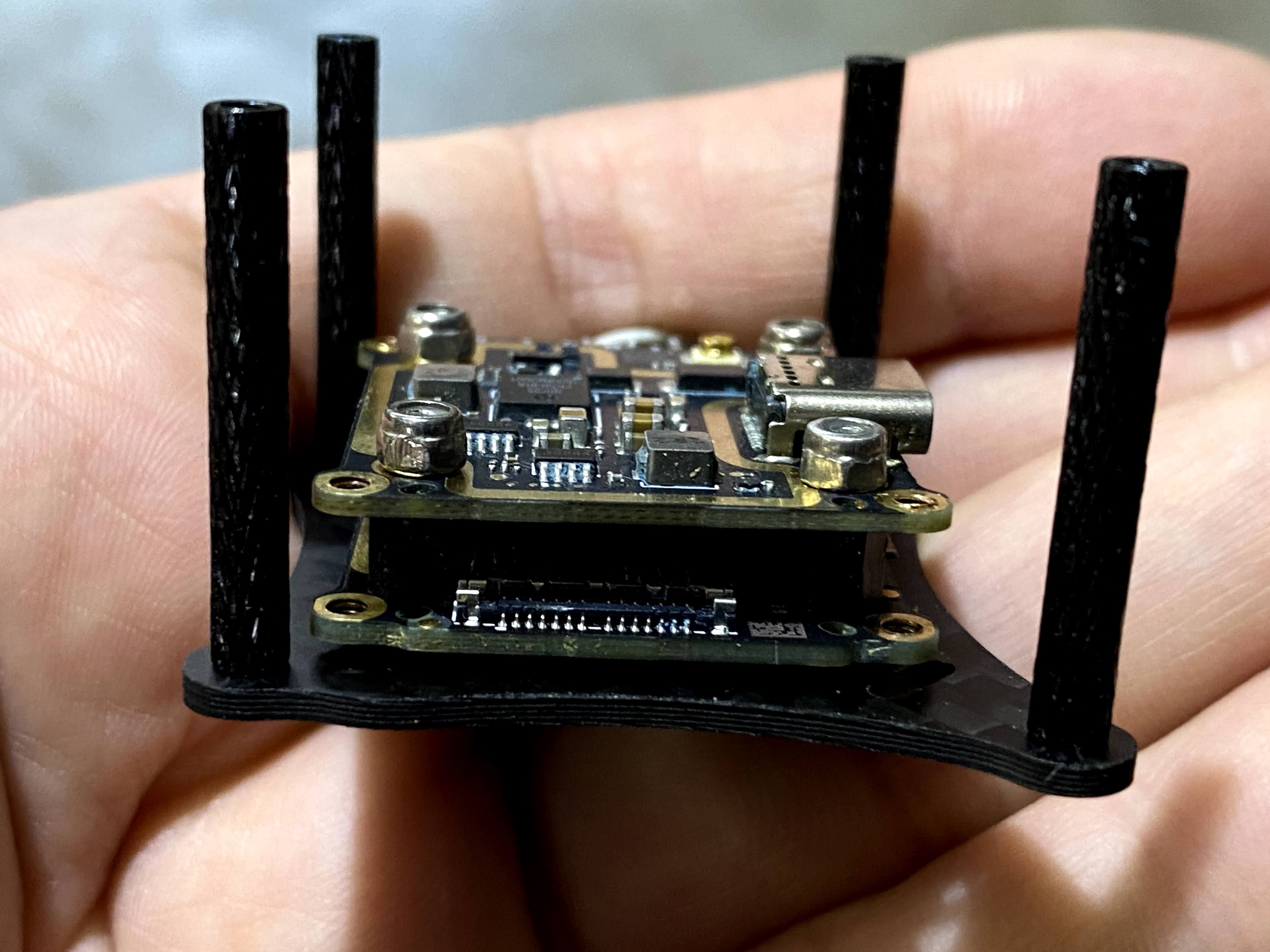
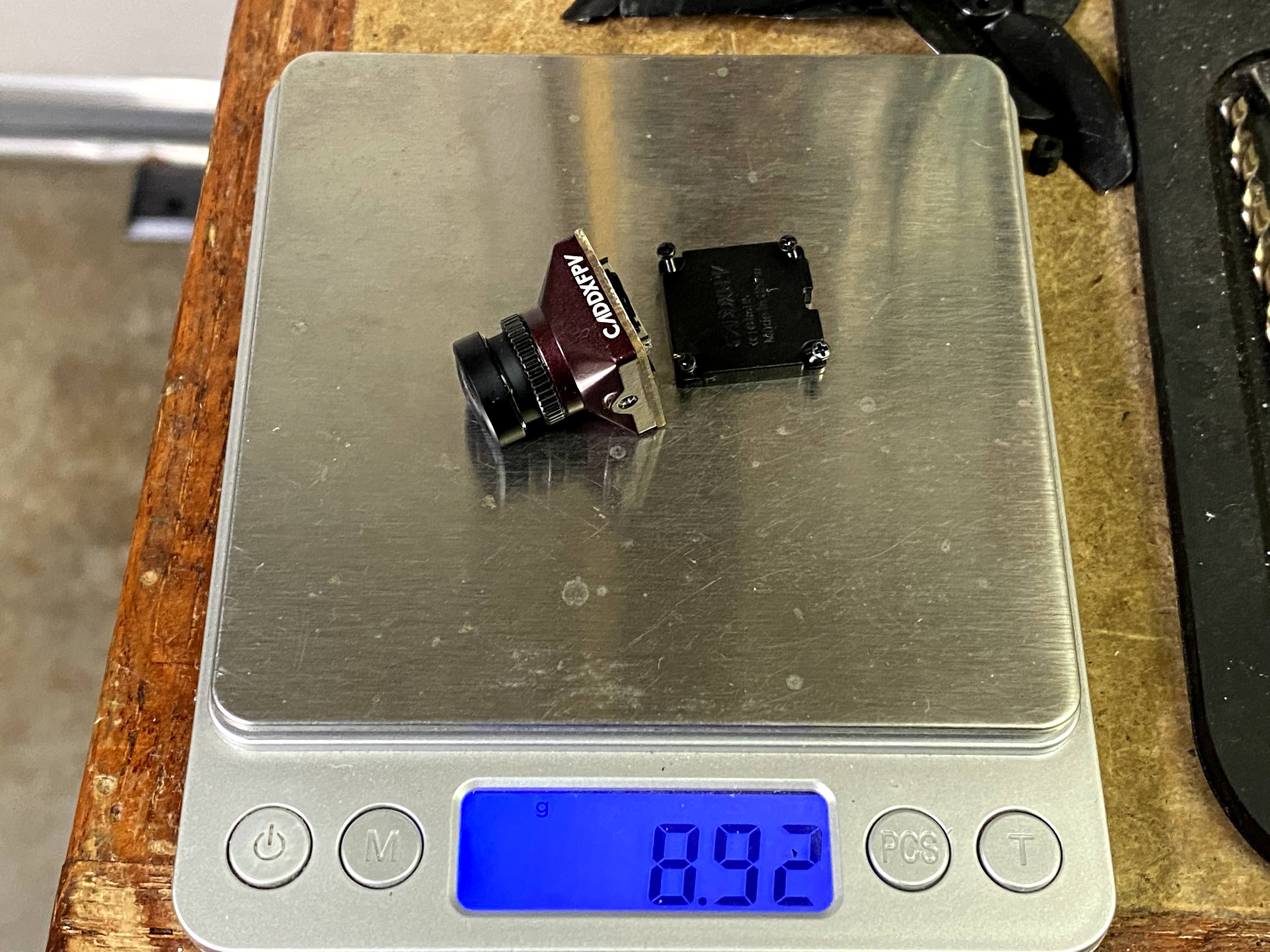
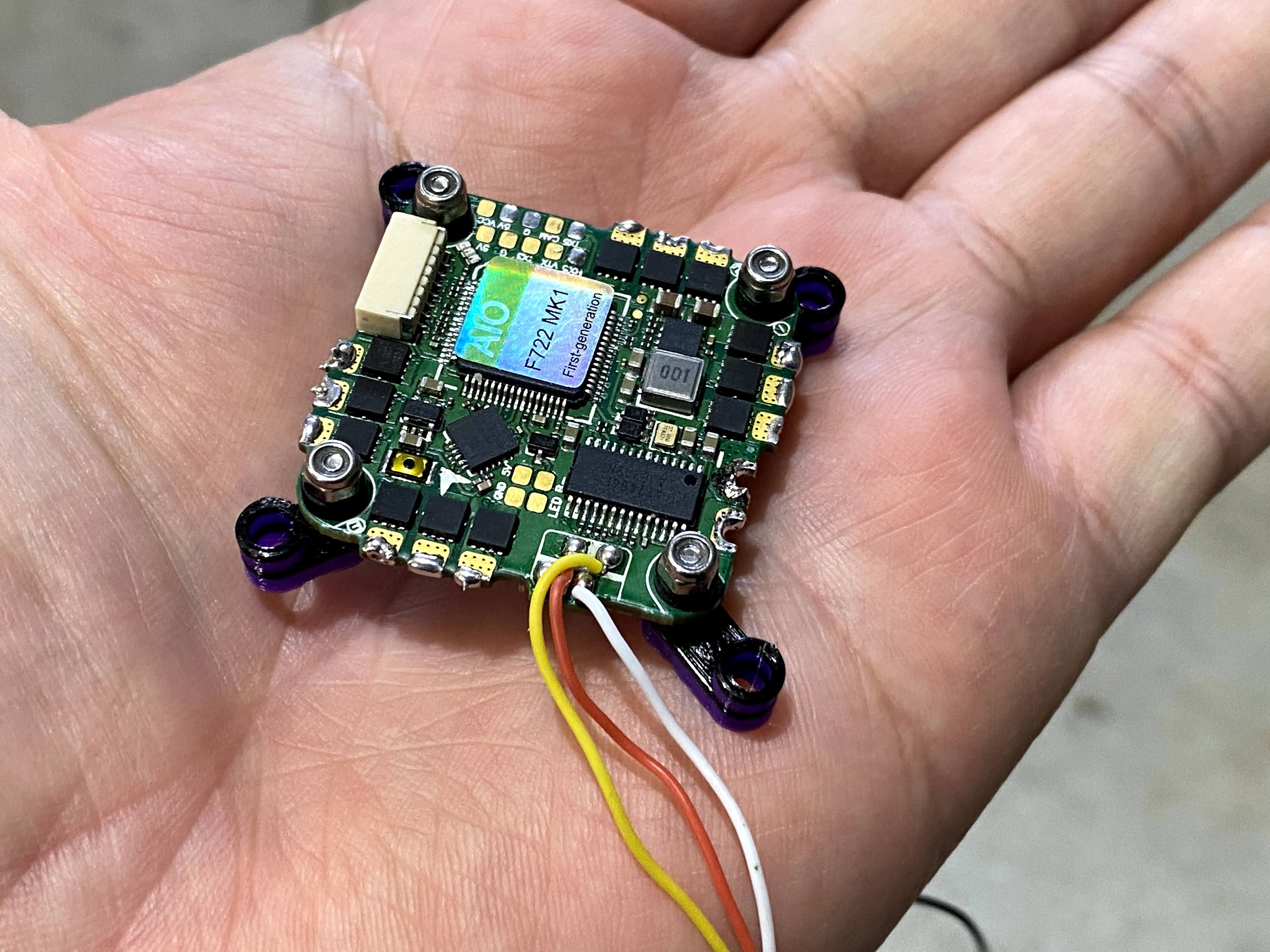
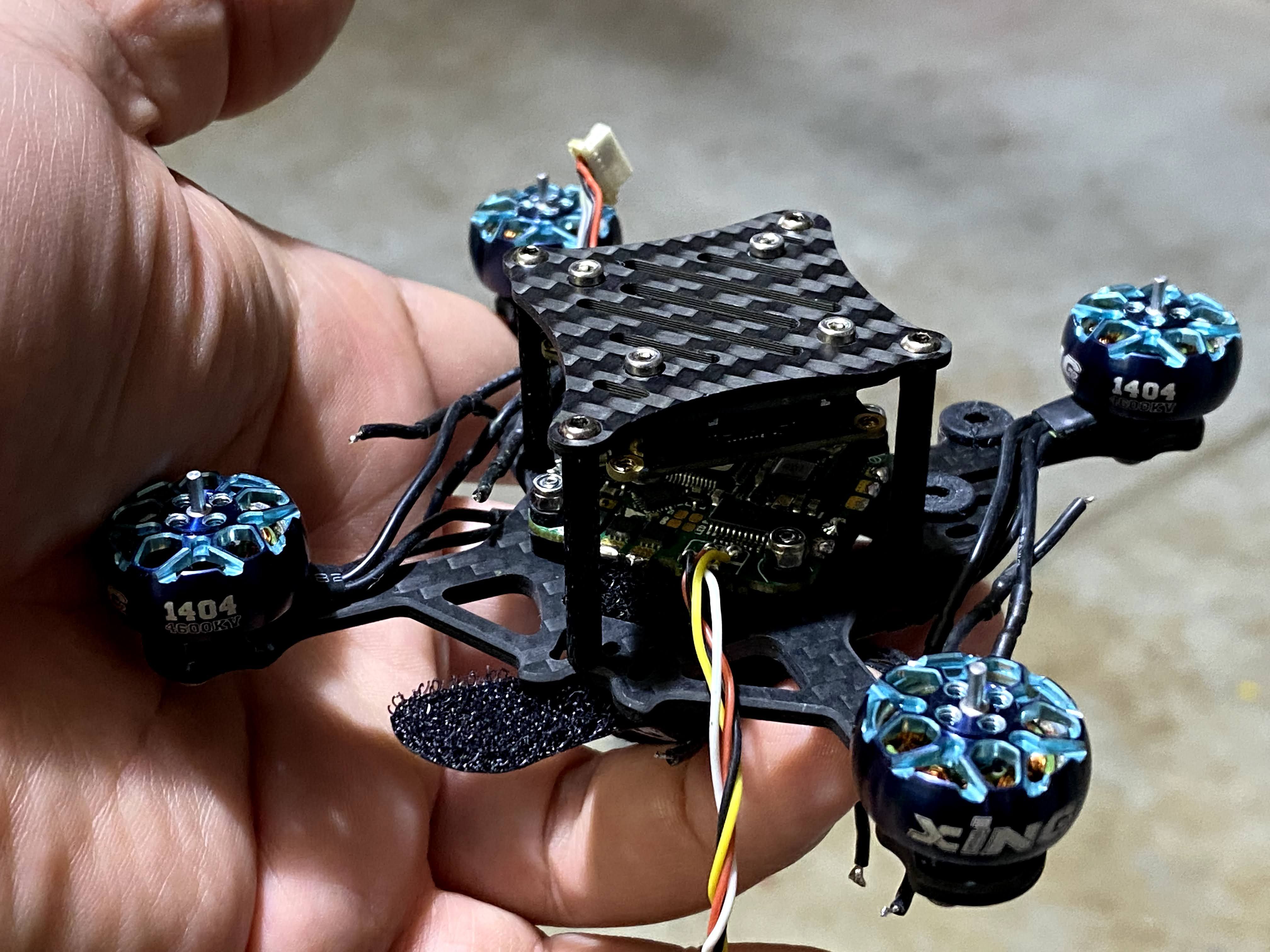
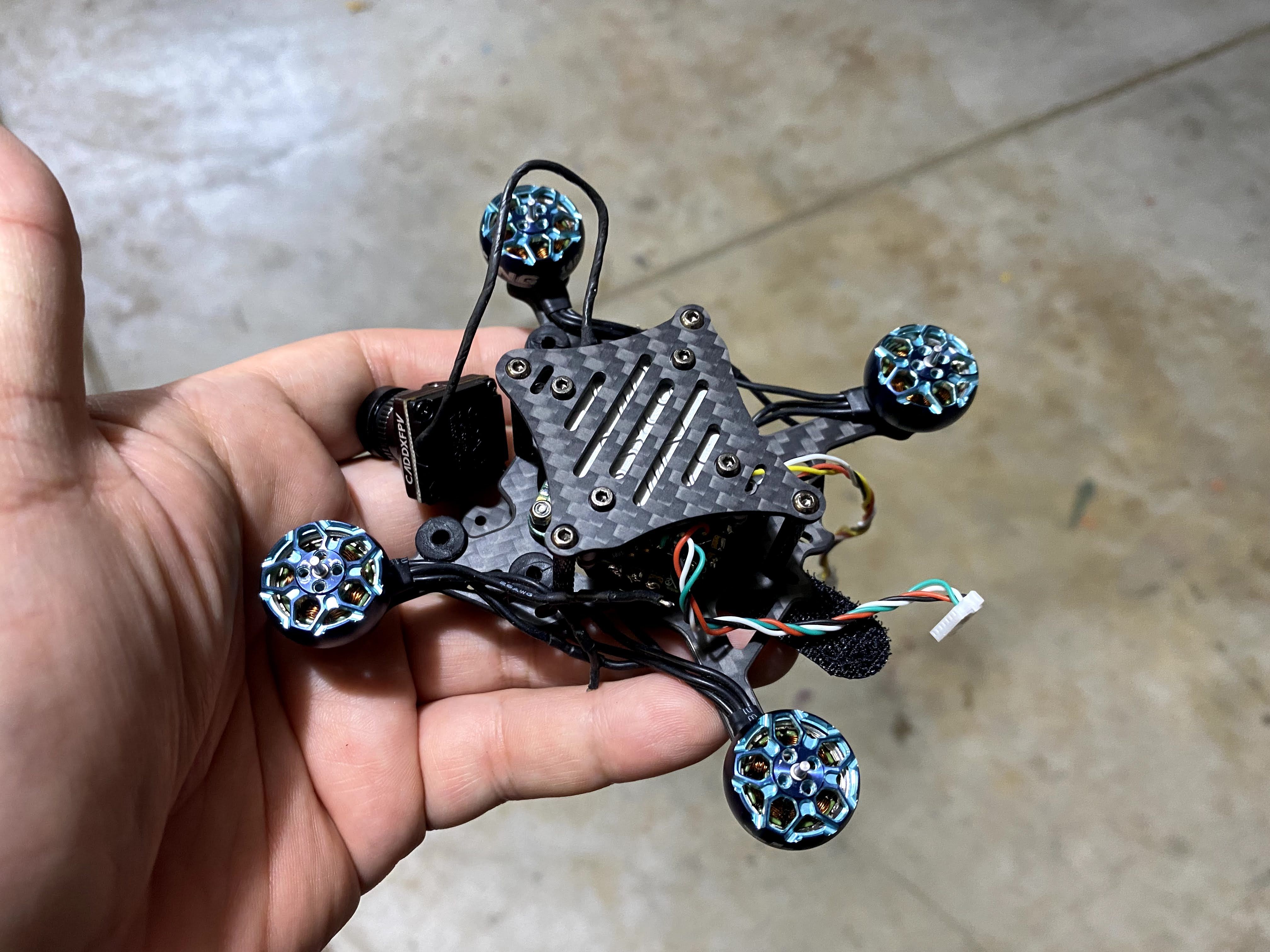
I did not have all the extra parts to build this quad, so I had to pull parts from 3 different quads to built this. The FC and Polar camera came off the Emax BabyHawk II HD, Naked Vista from the iFlight A85, and XING2 1404 4600kv motor from the Turtle 149. I guess you can say I am trying to keep this build light because I am using a de-cased Caddx Vista to try and save 9g. But that polar camera quite heavy, weighing in at 8.92g. If I really wanted to save even more weight, I would use a Nebula Pro because that only weighs 6.10g. I think I might benefit from look light capabilities with the Polar camera so I will take the extra weight for now.
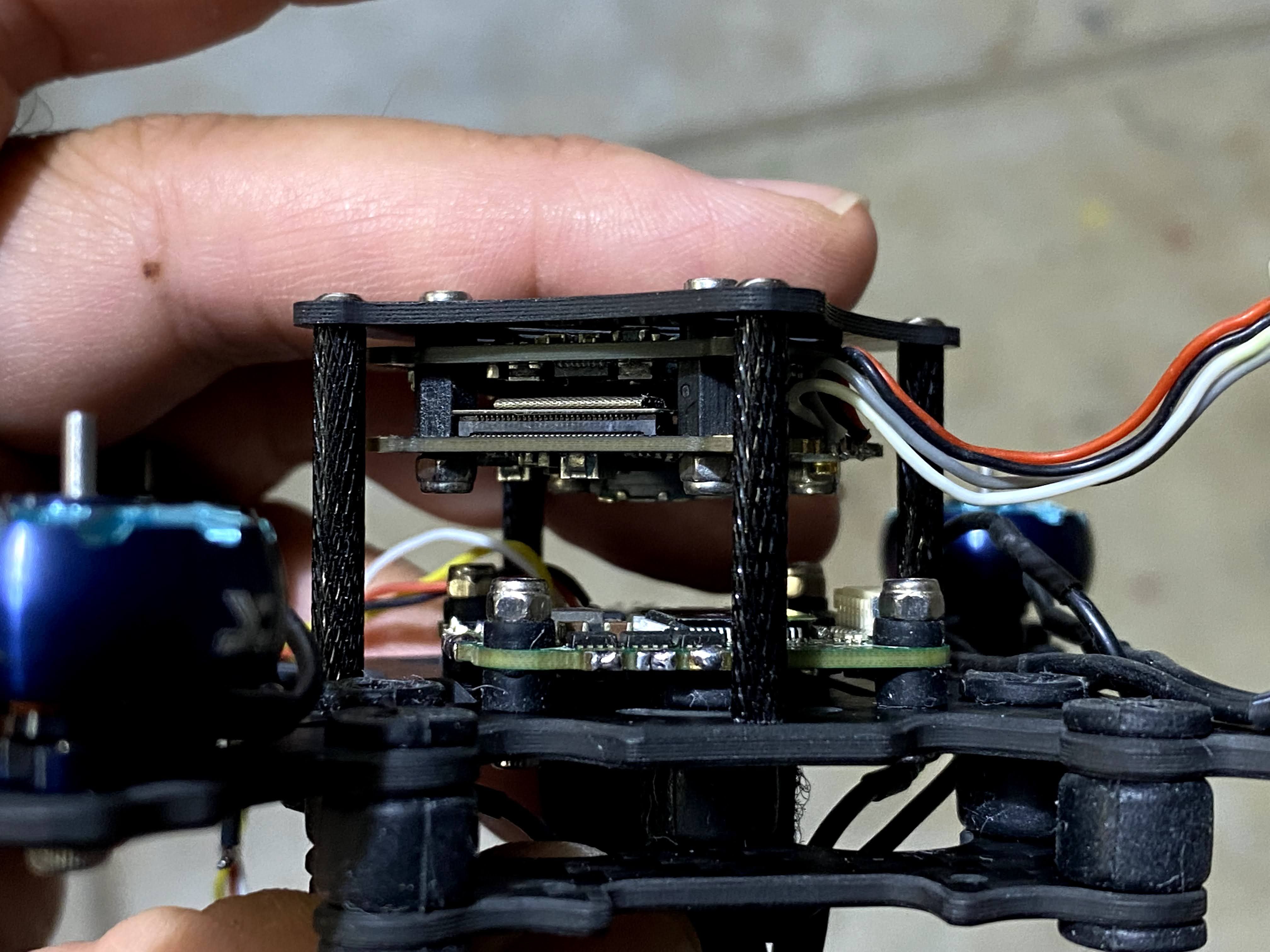
Since I was able minimize the height of the Caddx Vista (de-cased it), it gave me a lot of space to stuff the Crossfire Nano RX between the FC and Vista.

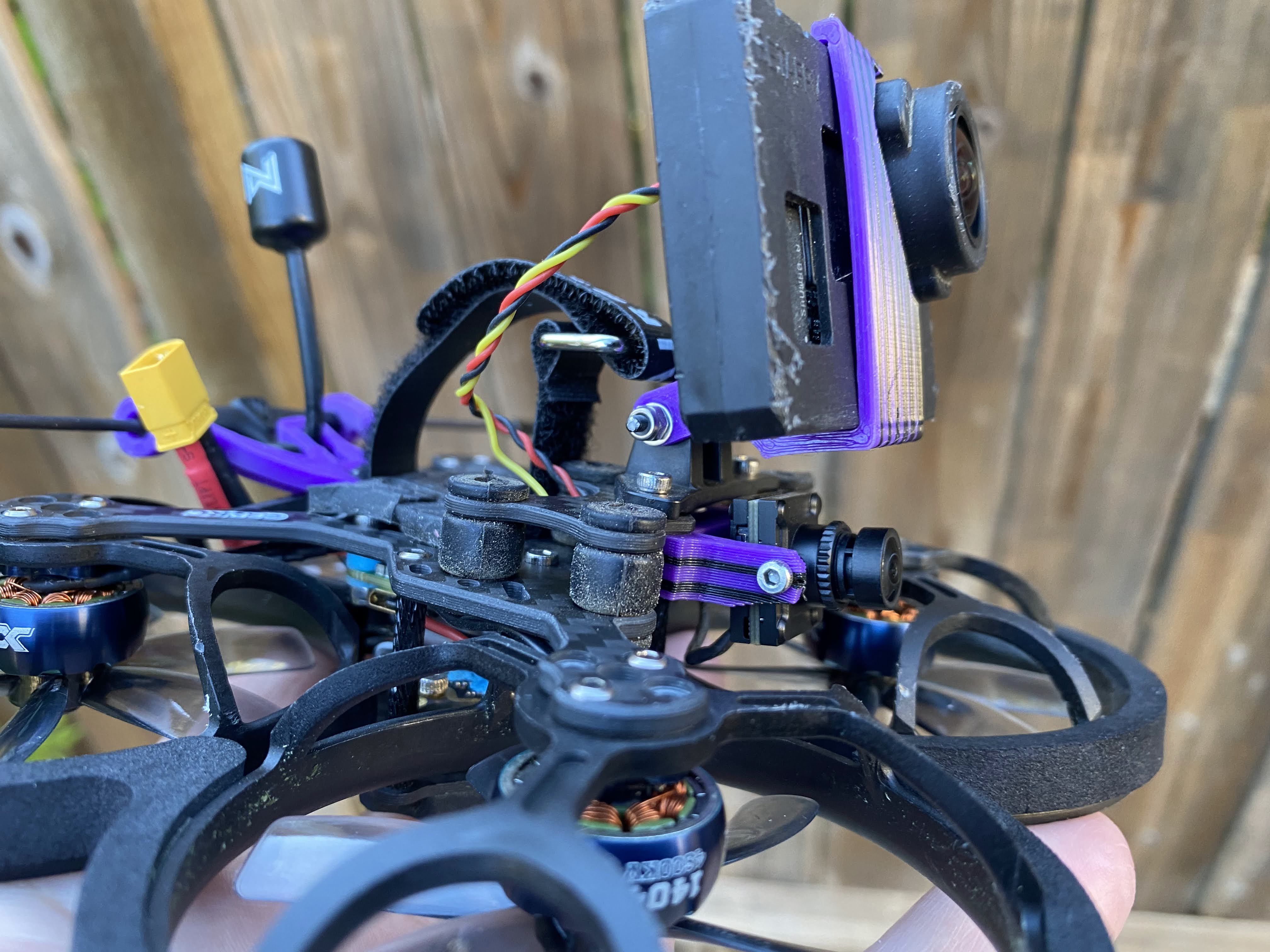
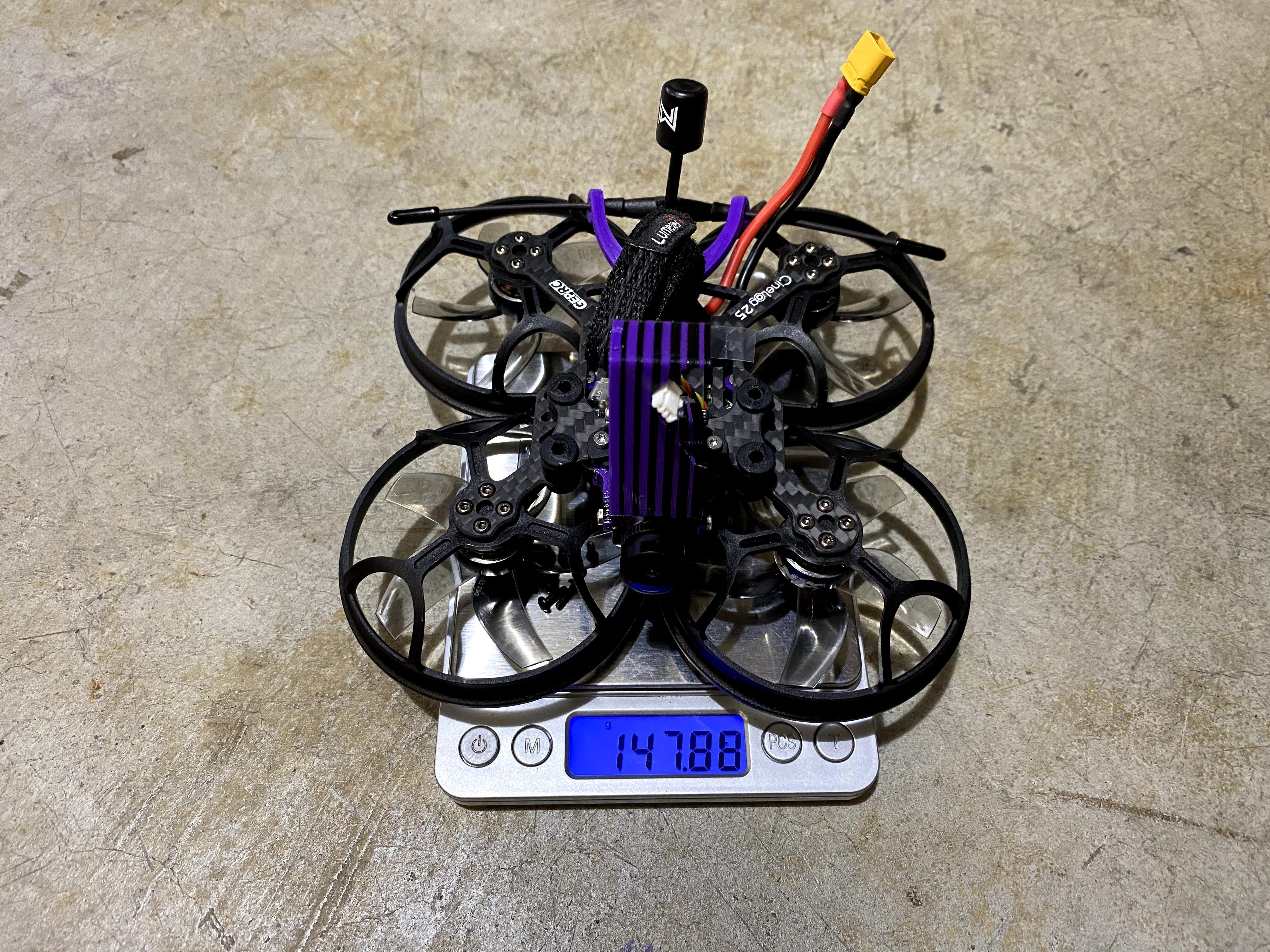
I am not of fan of having the Capacitor on the XT30 plug because you are supposed to have it as close to the FC as possible. So, the best place I found for it is the rear of the quad, right in between the two prop guards. It is hot glued in place, and it seems like it will be fine sitting there.

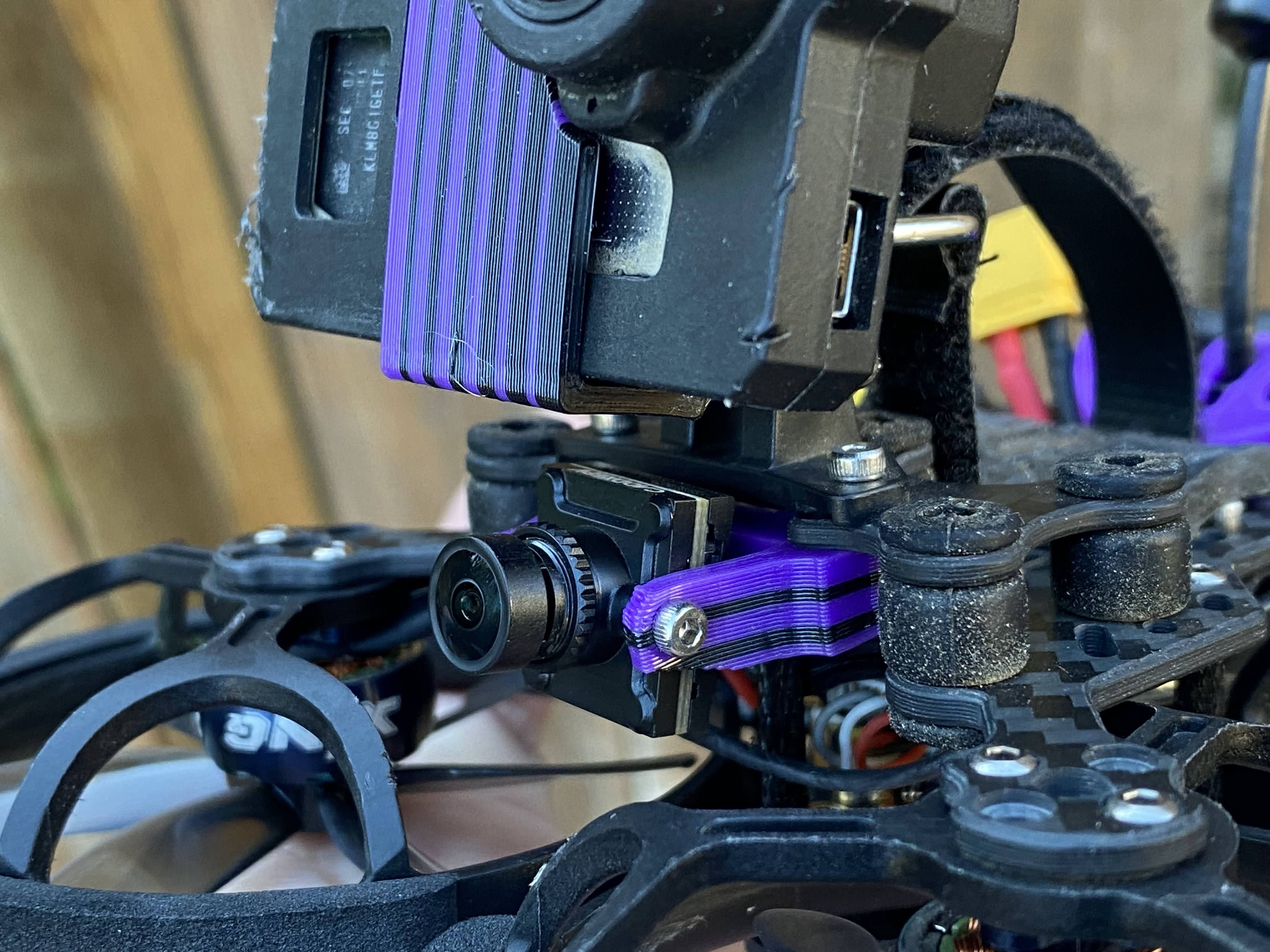
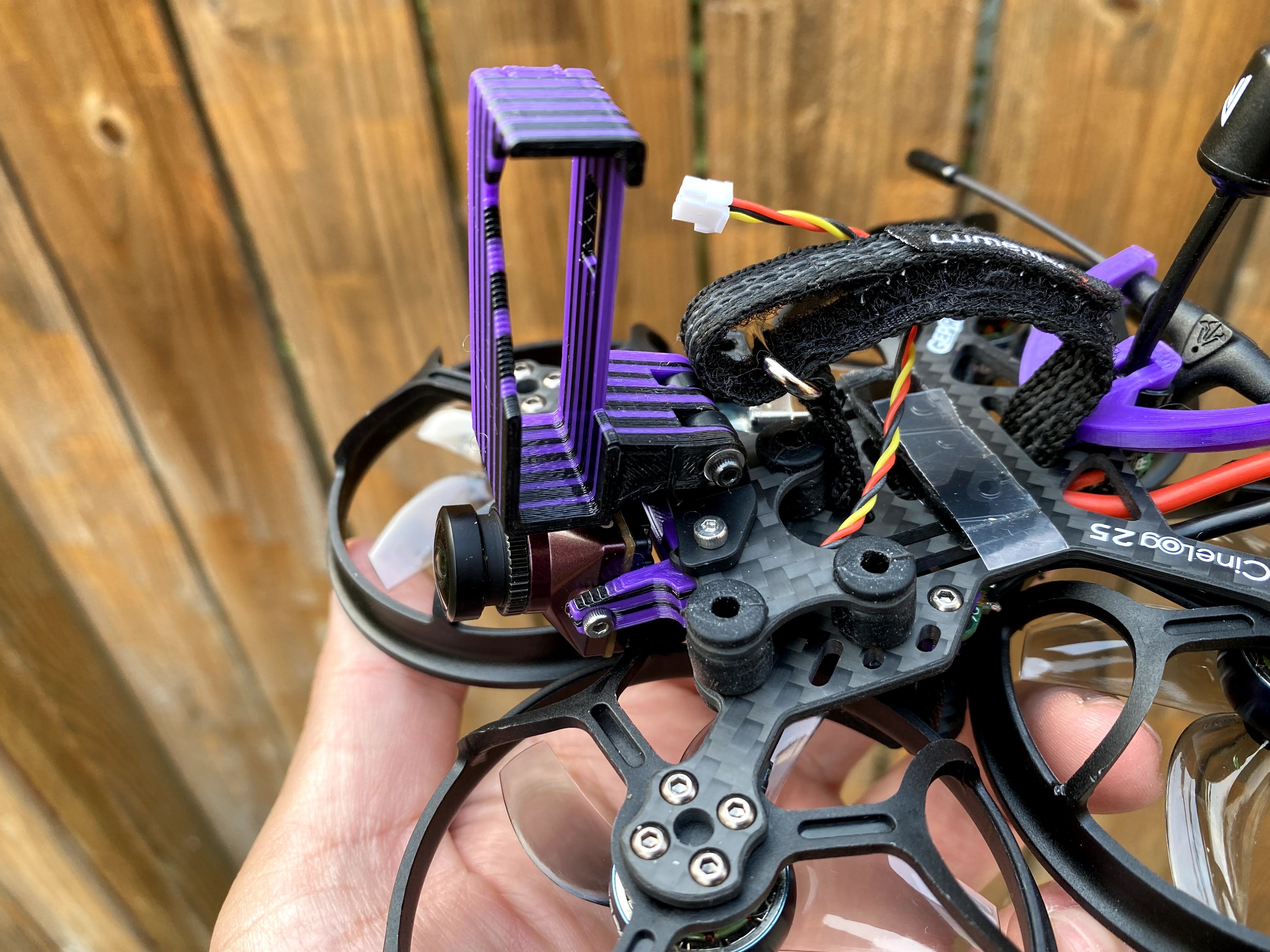
The 3D printed parts that were included with the frame kit was ugly (poorly printed) so, I printed my own. The Naked GoPro mount was my friend's idea to move it forward so the props guards will not be in view when using SuperView mode. The FPV camera mount was downloaded from Thingiverse but I remixed it to add more support on the arms and extended the camera forward so I can get more angle if I need to.

The rear Immortal T / Caddx Antenna mount was also downloaded from thingiverse but remixed so I can use a ziptie to secure the antenna so it would not move around.
Updated (Aug 22, 2021)
The de-cased Caddx Vista was not doing too well. I was getting horrible range and the camera cable keeps popping off. I switched back to the regular Caddx Vista air unit.
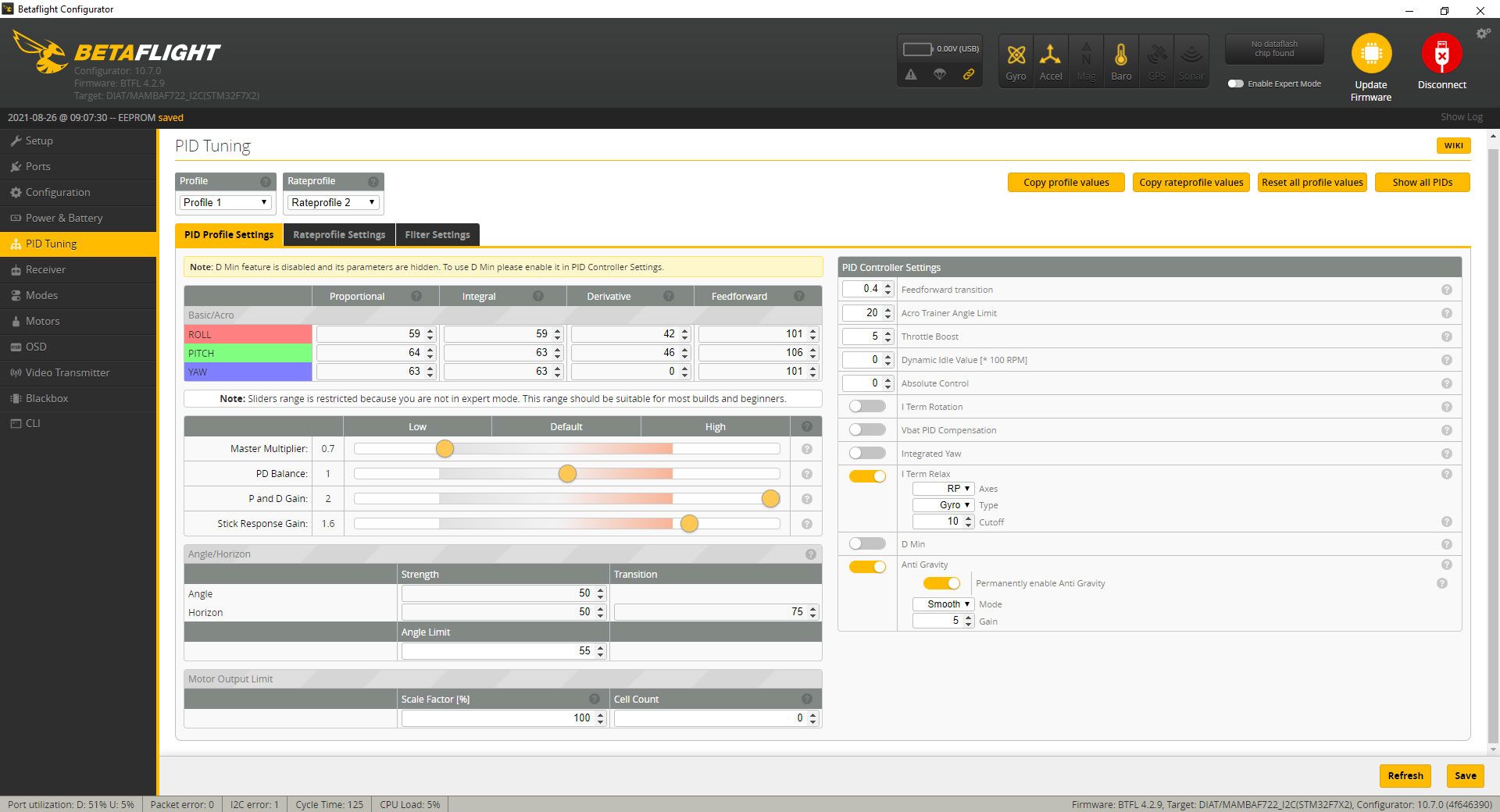
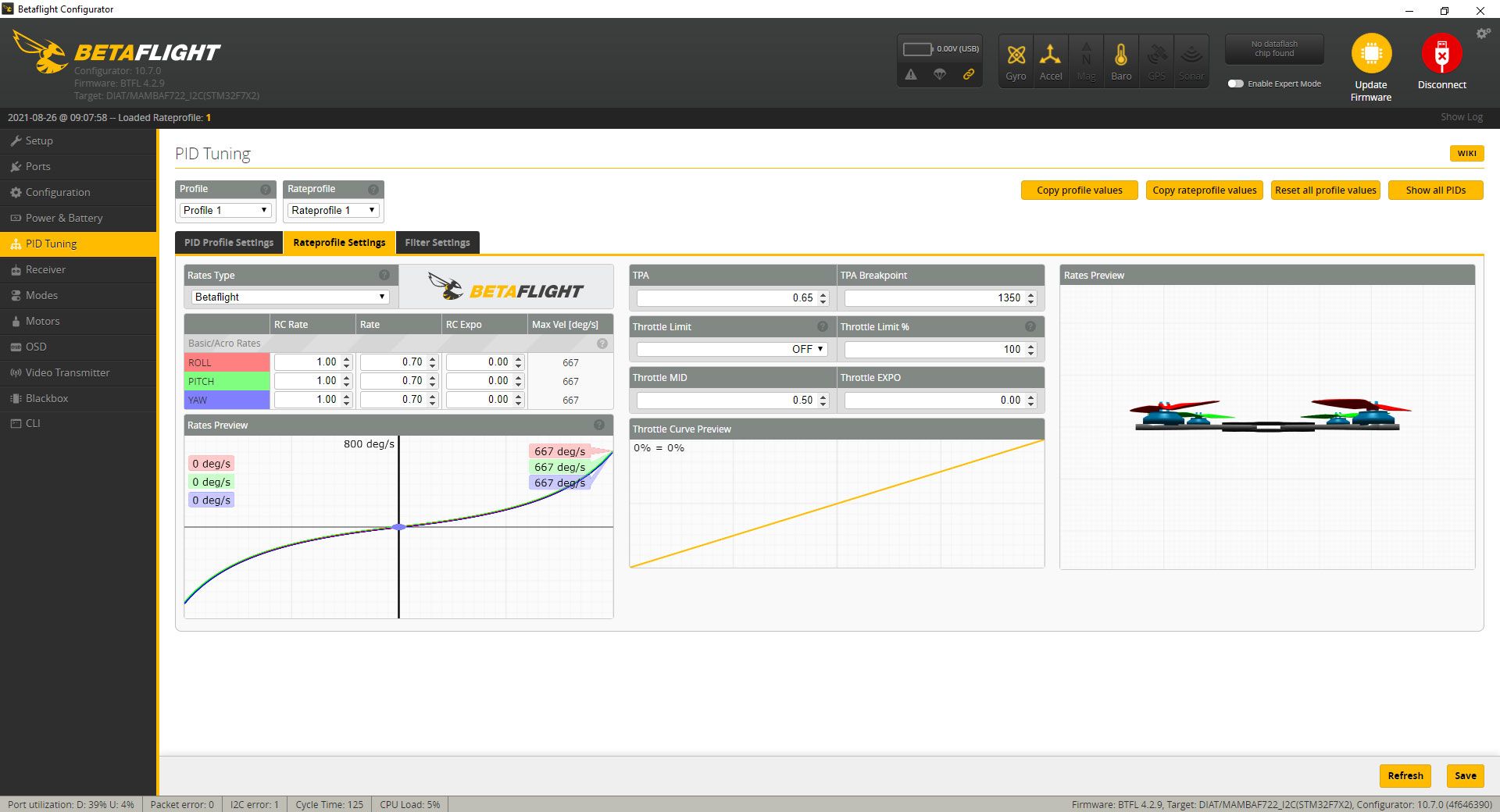
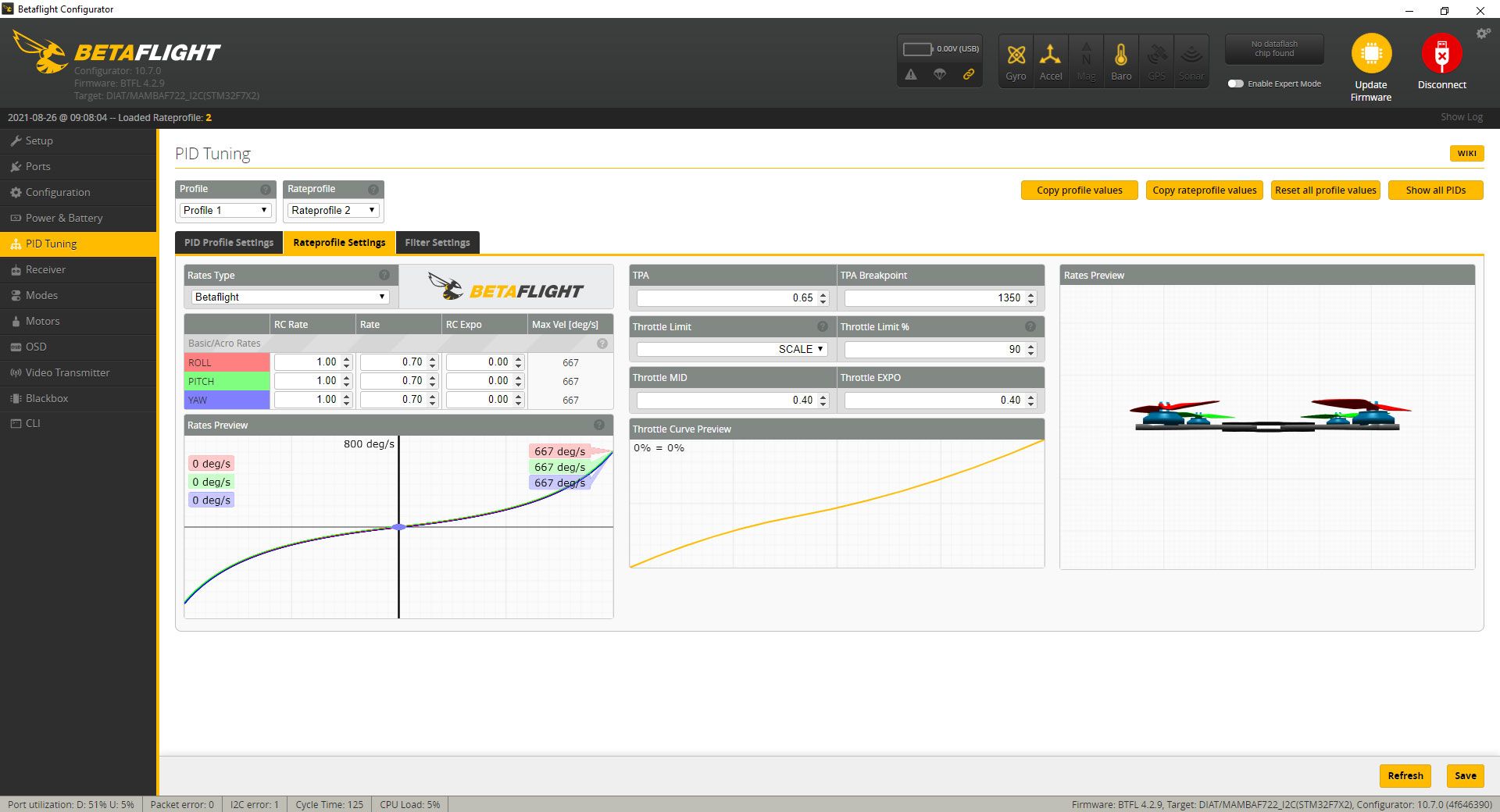
PID Tunes
I took the following profile settings from GEPRC Dump file for the CineLog 25:
profile 0
profile 0
set profile_name = -
set dyn_lpf_dterm_min_hz = 91
set dyn_lpf_dterm_max_hz = 221
set dyn_lpf_dterm_curve_expo = 5
set dterm_lowpass_type = PT1
set dterm_lowpass_hz = 150
set dterm_lowpass2_type = PT1
set dterm_lowpass2_hz = 195
set dterm_notch_hz = 0
set dterm_notch_cutoff = 0
set vbat_pid_gain = ON
set vbat_sag_compensation = 0
set pid_at_min_throttle = ON
set anti_gravity_mode = SMOOTH
set anti_gravity_threshold = 250
set anti_gravity_gain = 5000
set feedforward_transition = 0
set acc_limit_yaw = 0
set acc_limit = 0
set crash_dthreshold = 50
set crash_gthreshold = 400
set crash_setpoint_threshold = 350
set crash_time = 500
set crash_delay = 0
set crash_recovery_angle = 10
set crash_recovery_rate = 100
set crash_limit_yaw = 200
set crash_recovery = OFF
set iterm_rotation = OFF
set iterm_relax = RP
set iterm_relax_type = GYRO
set iterm_relax_cutoff = 15
set iterm_windup = 100
set iterm_limit = 400
set pidsum_limit = 500
set pidsum_limit_yaw = 400
set yaw_lowpass_hz = 0
set throttle_boost = 5
set throttle_boost_cutoff = 15
set acro_trainer_angle_limit = 20
set acro_trainer_lookahead_ms = 50
set acro_trainer_debug_axis = ROLL
set acro_trainer_gain = 75
set p_pitch = 64
set i_pitch = 63
set d_pitch = 46
set f_pitch = 106
set p_roll = 59
set i_roll = 59
set d_roll = 42
set f_roll = 101
set p_yaw = 63
set i_yaw = 63
set d_yaw = 0
set f_yaw = 101
set angle_level_strength = 50
set horizon_level_strength = 50
set horizon_transition = 75
set level_limit = 55
set horizon_tilt_effect = 75
set horizon_tilt_expert_mode = OFF
set abs_control_gain = 0
set abs_control_limit = 90
set abs_control_error_limit = 20
set abs_control_cutoff = 11
set use_integrated_yaw = OFF
set integrated_yaw_relax = 200
set d_min_roll = 0
set d_min_pitch = 0
set d_min_yaw = 0
set d_min_boost_gain = 37
set d_min_advance = 20
set motor_output_limit = 100
set auto_profile_cell_count = 0
set launch_control_mode = NORMAL
set launch_trigger_allow_reset = ON
set launch_trigger_throttle_percent = 20
set launch_angle_limit = 0
set launch_control_gain = 40
set ff_interpolate_sp = AVERAGED_2
set ff_spike_limit = 60
set ff_max_rate_limit = 100
set ff_smooth_factor = 37
set ff_boost = 15
set idle_min_rpm = 0
set idle_adjustment_speed = 50
set idle_p = 50
set idle_pid_limit = 200
set idle_max_increase = 150
set level_race_mode = OFF
NOTE: This is from a dump file so there are a lot of settings are just Default.
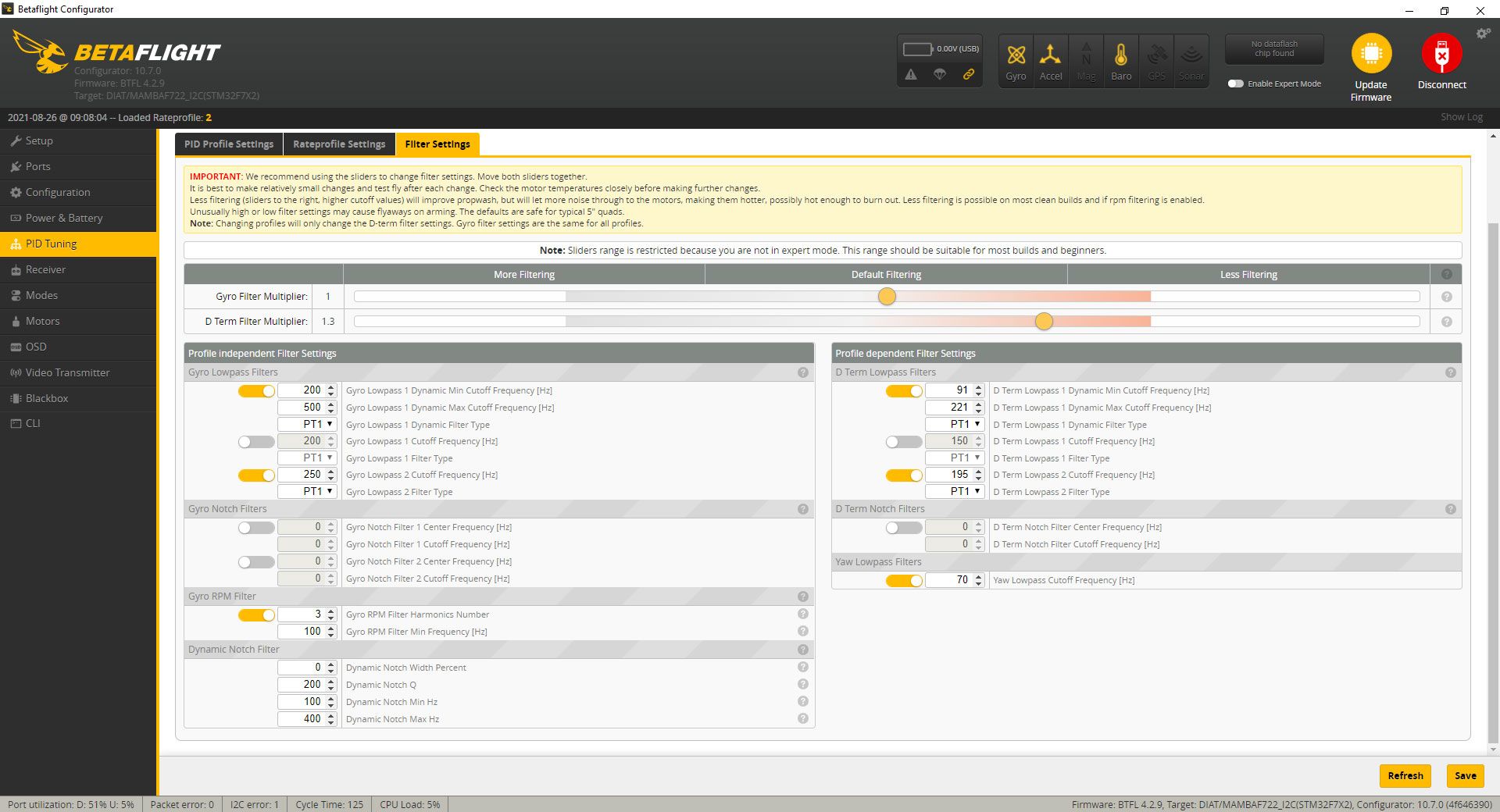
I also added the following Betaflight presets:
HD (smoothed FF for HD cameras, strong low turn rate smoothness, low iterm relax to minimise bounce back)
set iterm_relax_cutoff = 10
set rc_smoothing_auto_smoothness = 20
set ff_interpolate_sp = AVERAGED_3
set ff_smooth_factor = 40
set ff_spike_limit = 55
set ff_boost = 0
set feedforward_transition = 40
set yaw_lowpass_hz = 70
set throttle_boost = 5
set throttle_boost_cutoff = 10
set dyn_lpf_dterm_curve_expo = 7
set gyro_rpm_notch_q = 800
Vbat Compensation
set vbat_sag_compensation = 100
set vbat_pid_gain = off
The stock Cinelog 25 is not running bidirectional DSHOT, but I enabled it. I will add a screen shot of the filter settings shortly. I have to make sure it works well before I share it. Im just using the same filter settings from a different build. I will also need to work on the rates too.
Maiden Flight - Gemfan D63 Prop - GNB 850mah 4s
Faster Flight - Gemfan D63 Prop - Glacier 850mah 4s
UPDATE - Jul 24, 2022 - Rebuild
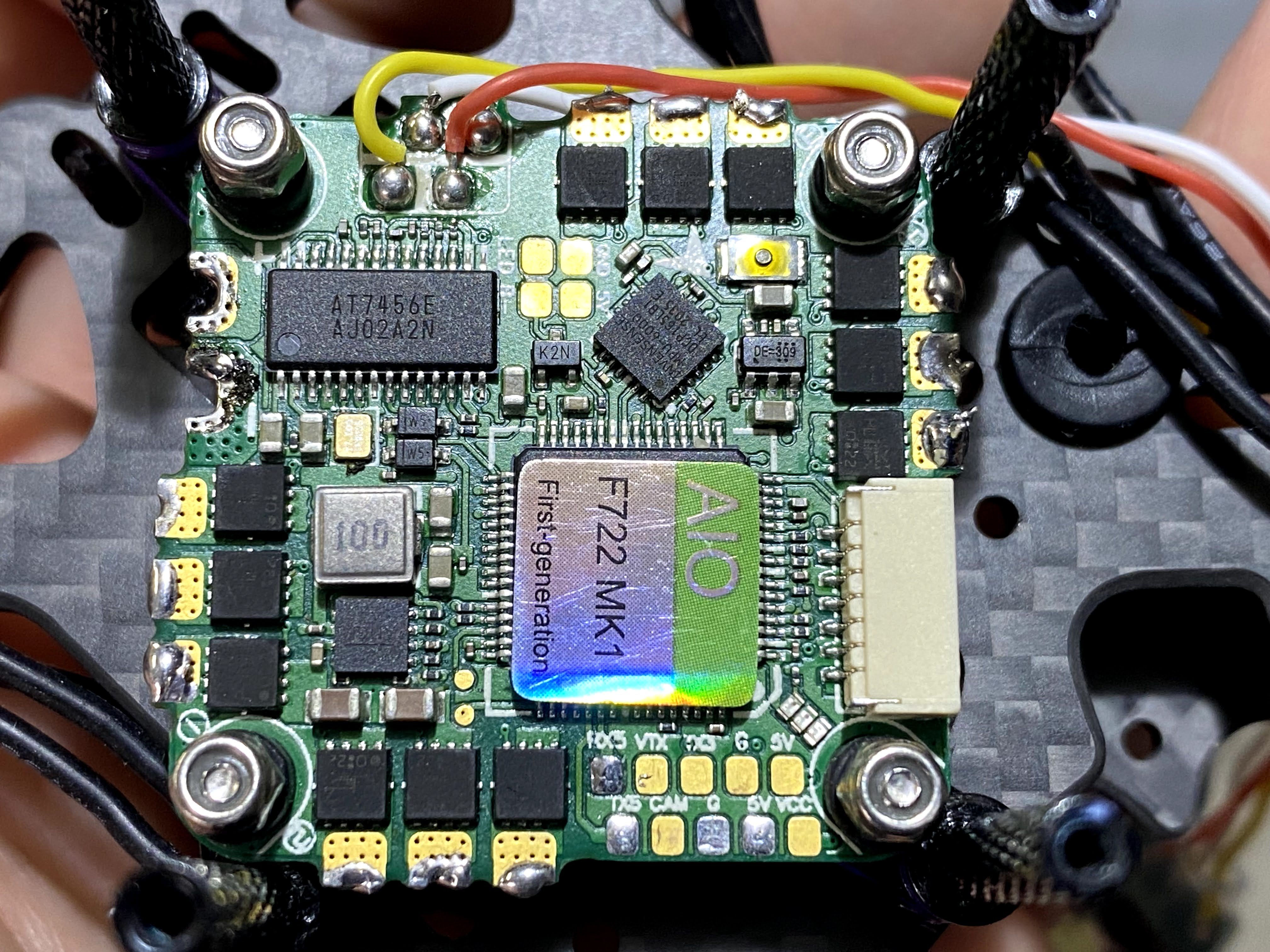
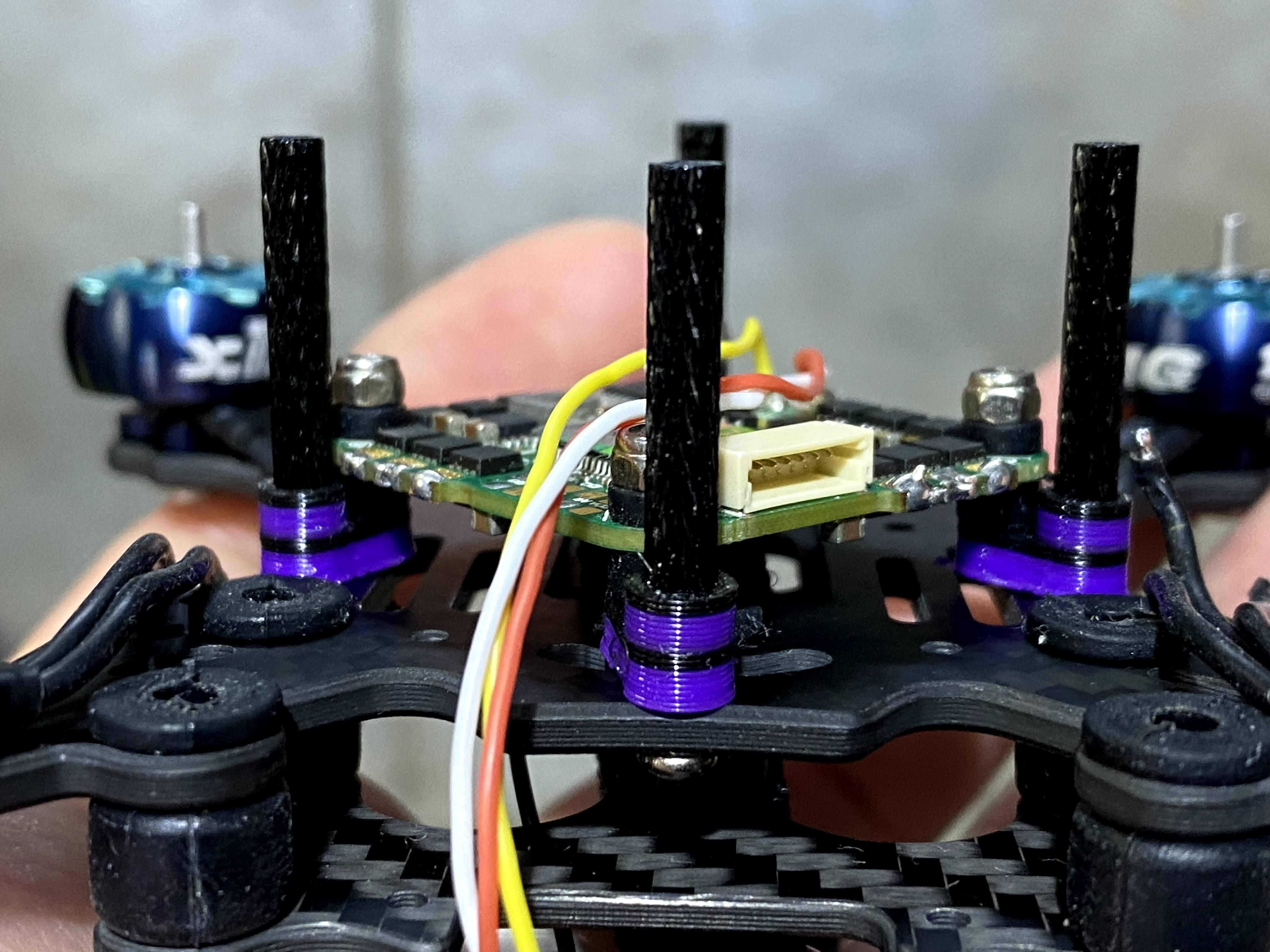
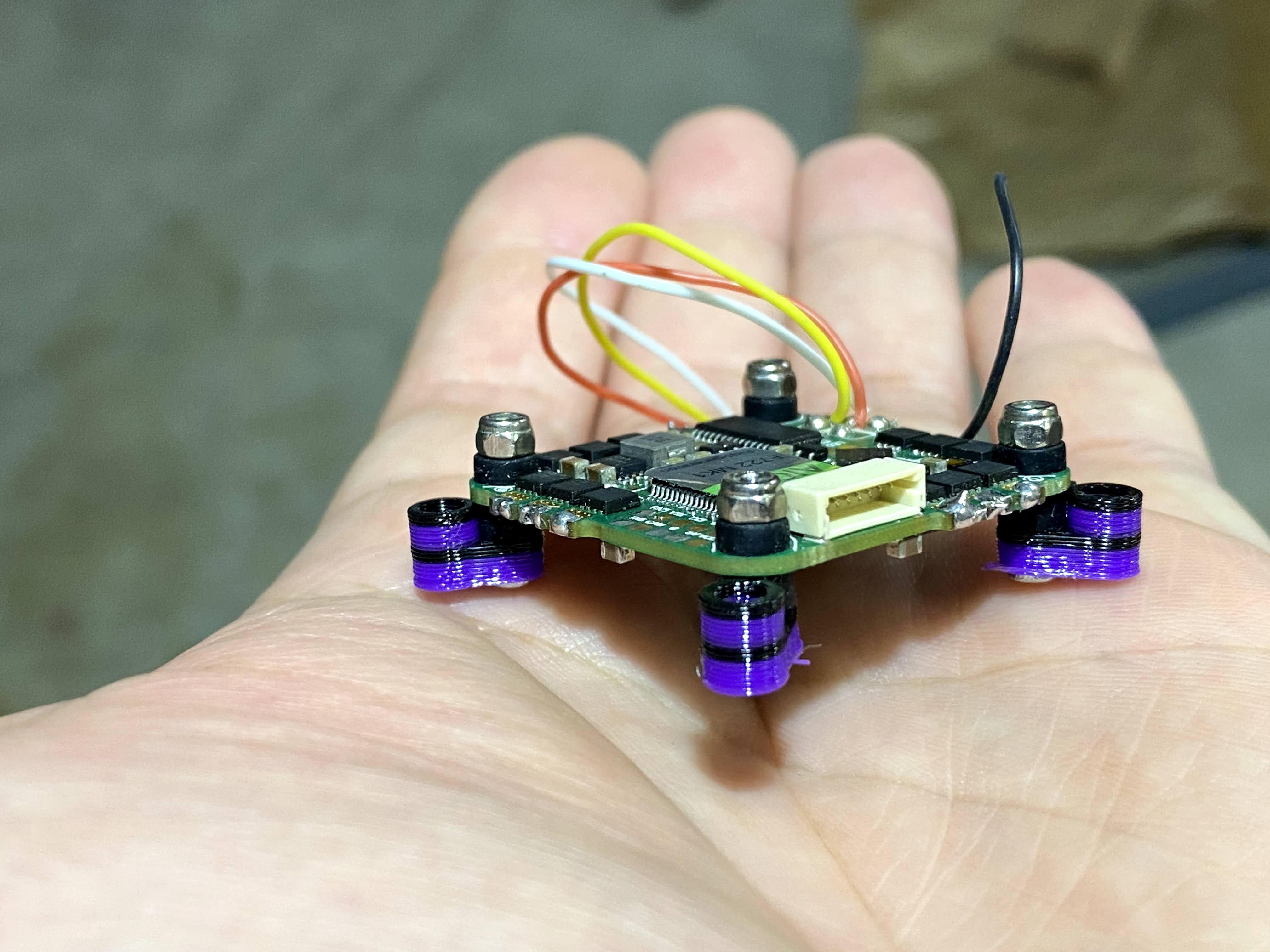
Replaced the old FC with the exact same board except it has a permanently attached USB port, instead of the external one (MamBA AIO F722 MK1 F7 Flight Controller 35A 2-6S Blheli_S). In the process of taking the quad apart I decided to make a few changes. When I first built this quad, I rotated the FC 45 degrees so it will fit like how all whoopstyle AIO boards was designed to fit, like a diamond. I used some 3D printed mounts to rotated it but over time the board shifted, and it looked awkwardly positioned. That is why I went back to the original frame design and mounted the board directly to the frame like how a typical 20x20 stack would sit. I also tried for the first time, the new ESC firmware, Bluejay (https://esc-configurator.com/).
Next, I Switched out the Caddx Vista Polar with a Naked Caddx Vista and Nebula Pro Nano, so I can save some weight. Even after the rebuild and BlueJay ESC firmware, I am still getting vibration in the FPV videos feed with the Gemfan D63 5 Blade props. Once I switched over to the HQ T63MMX6 prop it reduced the amount of visible vibration in the FPV video.
I recent learned about some new props that the Foxeer FoxWhoop are using and decied to give it a try. Here are my thoughts comparing the HQ T63MMX6 and DAL Cyclone T2530 props. The HQ props are a little quieter and grips the air better but the DAL is noticeably more efficient. During my first test and I was cruising at various speed and still getting over 7 minutes of flight time with Auline 850mah 4s lipo. I also notice a slightly more vibration in the FPV video feed. But still second best to the HQ prop. I would totally accept the slight flaws the DAL props have to gain the extra flight time. Without I doubt, I would totally get rid of the Gemfan D63 5 blade props when compaired to the HQ T63MMX6 and DAL Cyclone T2530 props.
Sample Video of the Current Setup (Rebuilt with Naked Vista Nebula Nano Pro & DAL 2530 Props):
Naked GoPro 7 Black w/ Hypersmooth
Same video as above - DJI DVR view
Photos






































Part List
Show stores (4)Guides & Reviews

AirbladeUAV has done it again and this time they've brought long range to the 5" class! Based on the popular Transformer Mini, the new Transformer 5" Ultralight adopts a lot of the same design philosophies with larger props and more payload capacity. It can fly upwards of 20 minutes on a 4 cell Li-Ion battery pack and in ideal conditions it's got a range of over 4 to 5 miles. In this guide I'll walk..
Read more
With the release of the DJI FPV Drone cinematic FPV has become a lot more accessible, but you certainly don't want to crash a $750 drone! The QAV-CINE Freybott is a compact, lightweight cinematic FPV drone that can take a hit and keep going. It's a lot safer to fly indoors and around people. With a naked GoPro or the SMO 4k you can capture some great stabilized footage. In this guide I'll show you..
Read more







New Message for wrong17