
I've gotten back into whoops due to cold weather and a revival in the local racing scene. 65mm 1s seems to be the best combo and there are dozens of options for builds but seem dominated by the Mobula 6 or the newbeedrone AcroBee or Hummingbird. I have to do something different so when I saw the Fractal Engineering 65 board I was smitten
The Fractal frame addresses several issues with tiny whoop frames:
- Weak unibody frames that can feel 'floppy' during flight
- Easily broken ducts and frame connections - breaking one duct usually leads to throwing away the whole frame
- Boring
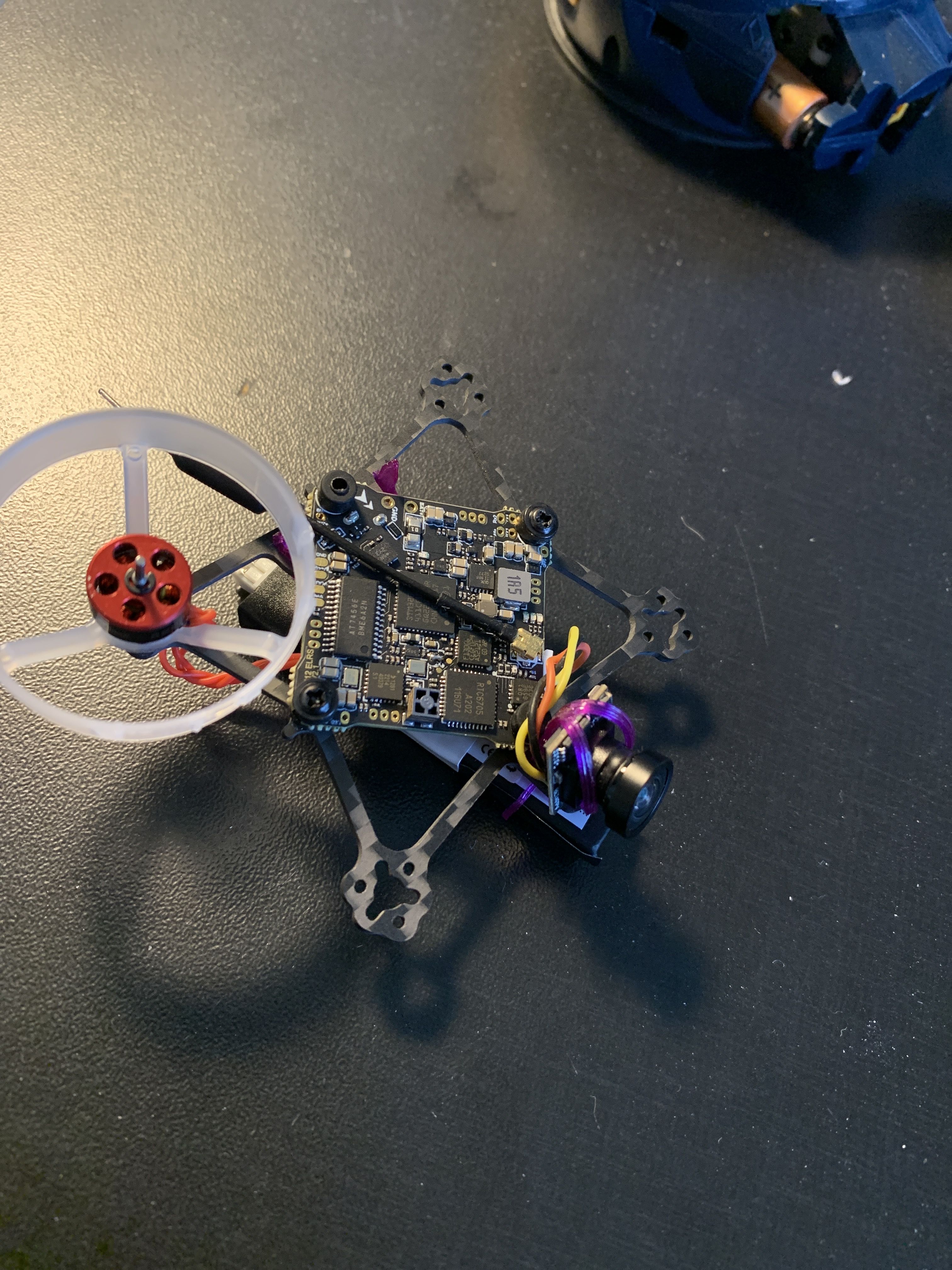
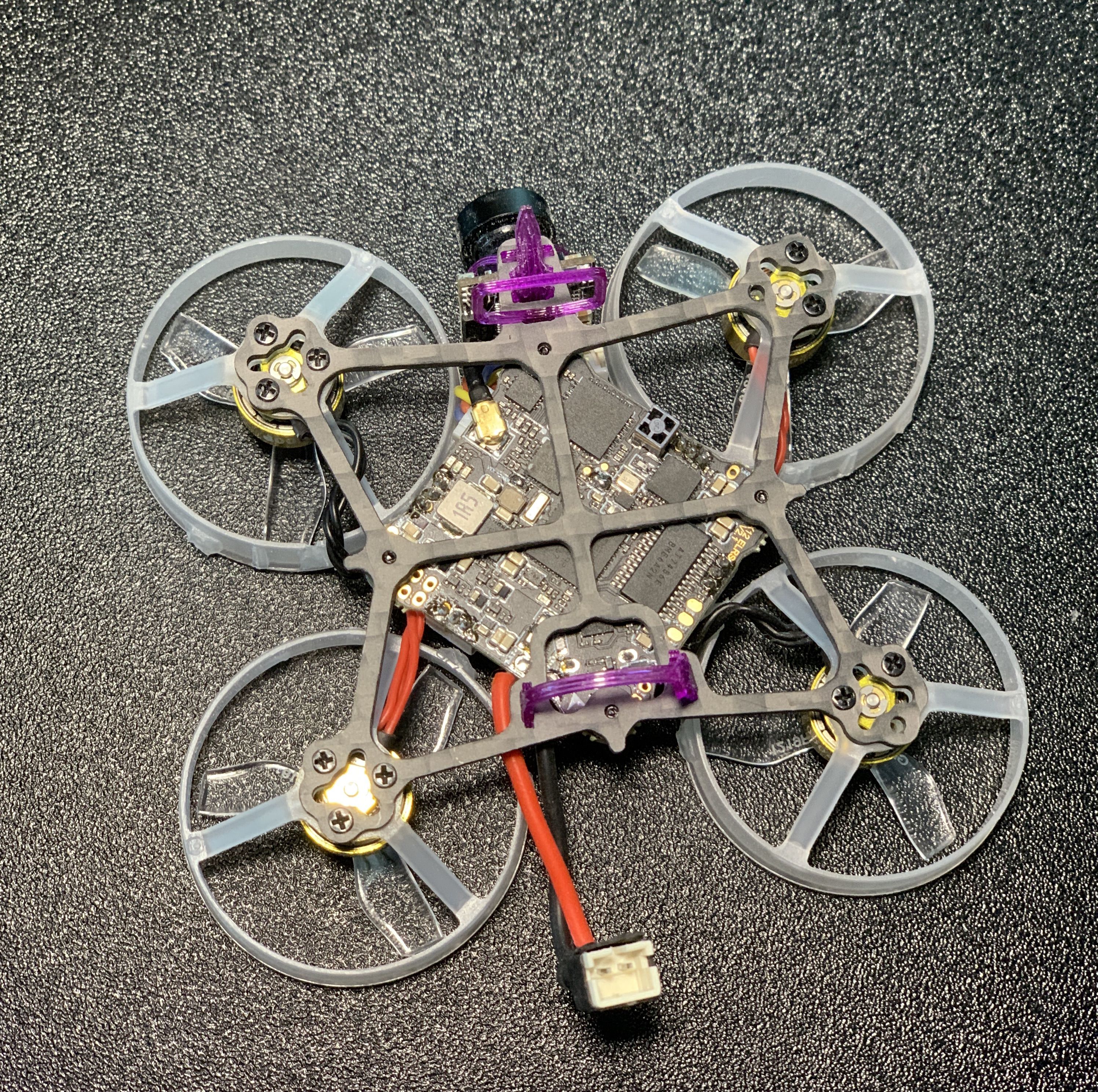
The design of the frame accounts for a common USB port location of whoop boards facing down through the bottom. I mounted it facing up but I love this detail. The individual ducts protect the electronics pretty well, though the camera kinda hangs out there. Finally the TPU battery and camera holders work well enough but I'd like to see a little more camera protection available.
The only worry I have about this frame involves the mounting screws, eventually I think they'll wear through the frame holes if you re-mount the AIO too much.
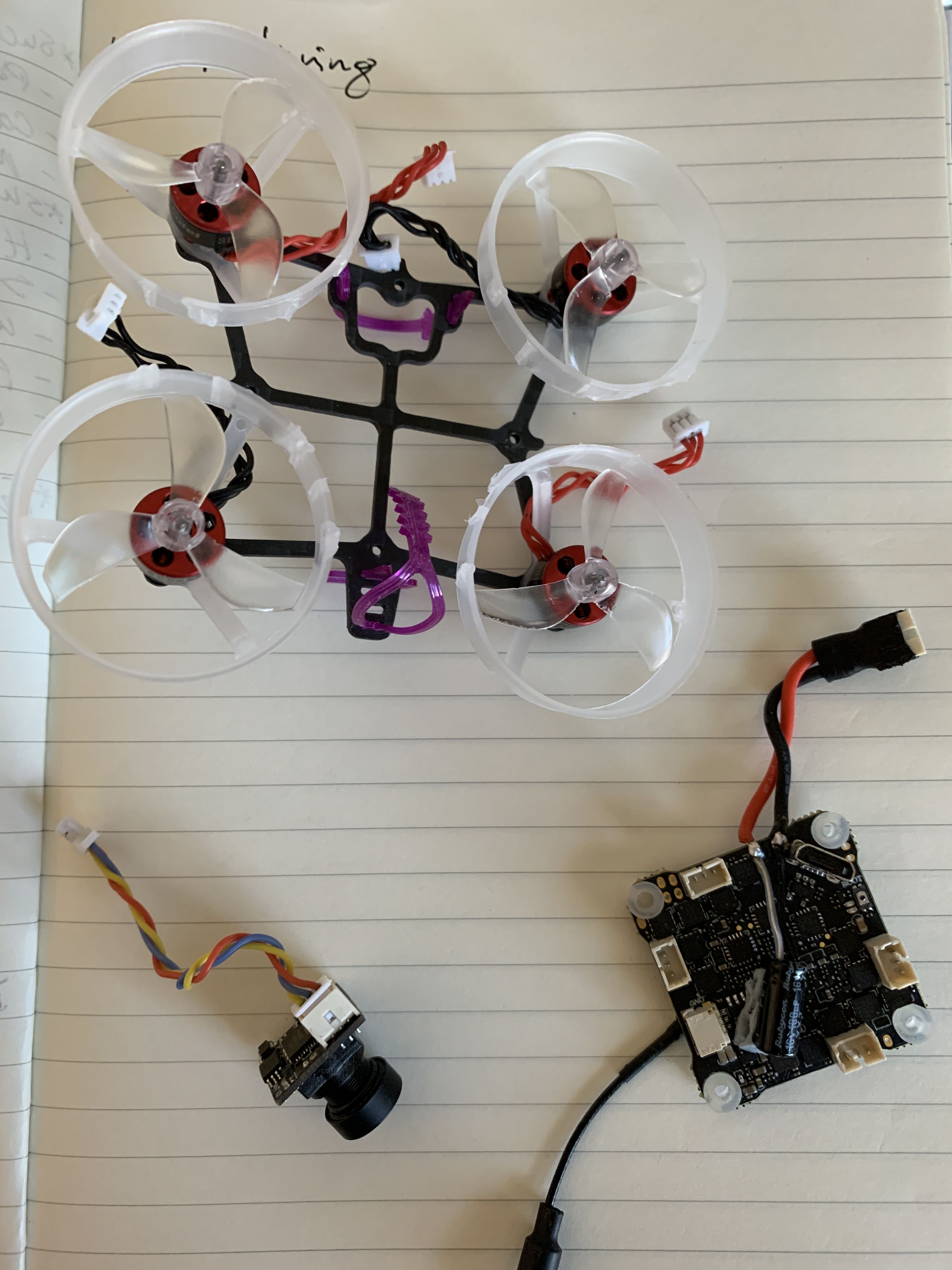
While the Happymodel DiamondF4 is recommended, I picked the X12 v2.1 for its 12A ESC's. I've run into issues burning out HM ESC's under high load so insurance costs a few extra grams. I also prefer motor plugs since I hate micro soldering; including a camera plug means there's almost no soldering needed other than the PH2.0 battery connector. Both of these AIO's have everything you need including ELRS and a 400mw VTX. Adding a 100uF capacitor (not included with the AIO) seems to smooth out some of the video.
If you've bought this AIO, make sure you save a dump of the config! Built-in ELRS is a little clunky these days since the RX code has to be merged into Betaflight directly. The config included with 'baseline defaults' of newer BF releases will not work well. Also if you plan to flash with Bluejay, be sure to set the Min/Max start power to maximum amounts in configurator if you're using 48 or 96khz PWM frequency.
Another tuning protip: disable Airmode, you will need to add a little more throttle during slow maneuvers, but it helps with stability during hovers.
My favorite micro camera (Caddx Ant Nano Lite 4:3) needed a little modification by desoldering the camera control input, otherwise the camera-holder TPU band won't fit around it.
For motors, TinyWhoops 22,000kv 802 unibells rip like there's no tomorrow and the gold bling really sets them apart. Gemfan 1219 3-blade fans compliment these motors with enough stiffness and light weight while keeping us under 8-9Amps during crazy flying. Initially I tried using HM ex0802 16,000kv motors, but they wouldn't spin reliably and fly under 1s.
Photos




Part List
Frame |
Fractal 65 – Frame Kit
Store.fractalengineering.net
|
$19.99 |
Flight Controller |
Happymodel X12 ELRS Special
Store.fractalengineering.net
|
$64.99 |
Motors |
802 22,000kv Tiny Whoop Onesies Brushless Motors - Deuce Juice
(5 builds)
Tinywhoop.com
|
$39.99 |
Propellers |
Gemfan 31mm 3-Blade 1mm Shaft - Blueberry
Tinywhoop.com
|
$4.20 |
FPV Camera |
Caddx Ant Lite Nano 1200TVL CMOS PAL/NTSC FPV Camera - Choose Your Aspect Ratio
(11 builds)
Racedayquads.com
|
$15.89 |
Batteries |
Tiny Whoop 1S 300mAh HV Battery - PH2.0 Connector - V2.0
Tinywhoop.com
|
$6.49 |










I'm curious as to how disabling airmode helps in a hover? are you using bi-dir dshot and dynamic idle? great build and write-up though.
Thanks for the comment! I've found airmode can really mess with whoops and toothpicks that have high power/weight ratio when you're hovering close to the ground or are just taking off. From what I've seen airmode keeps seeking an equilibrium and tends to 'bounce' a lot at ground-effect height. I am using bluejay with bidirection dshot and default filtering. I haven't setup dynamic idle but I might give it a shot.
just wondering but does disabling airmode still allow 0% throttle maneuvers? I remember that it was initially placed in BF to allow the drone to still have control at 0% throttle but would you still need that with dynamic idle on?
i would think so from a theoretical perspective but I'd ask on betaflight slack or discord or whatever they use if you want to know for sure. But I'm pretty sure air mode raises (or lowers at full throttle) individual throttles to keep motor differentials able to control the quad. dynamic idle is more like a blheli_32 setting in that it keeps the motor spinning a certain rpm to avoid desyncs while allowing the motor to be driven at a lower throttle setting when rpms are still high to quicken deceleration. so airmode raises overall throttle to keep the differences in motor speed useful, dynamic idle only effects each individual motor. with air mode off and dynamic idle on your props wouldn't stop but you would still lose authority at low throttle.
That was a great explanation! I never really thought of it that way but it makes total sense! I guess both are still important to keep then but Thank you very much for the explanation! but that still begs the question. Is it worth removing airmode when for those smaller type of quads with high power/weight ratios?
I'm not sure if turning off air mode is the right call since i don't fly anything like that. but what you're probably looking for is this https://github.com/betaflight/betaflight/wiki/4.3-Tuning-Notes#Linear-and-Dynamic-mixer-options. it's made to help with things like bouncing off the ground and lots off similar issues i think.