KingKong188
 By miromir237 on Apr 25, 2017
By miromir237 on Apr 25, 2017
Begginer quadcopter model for a friend from my old parts.
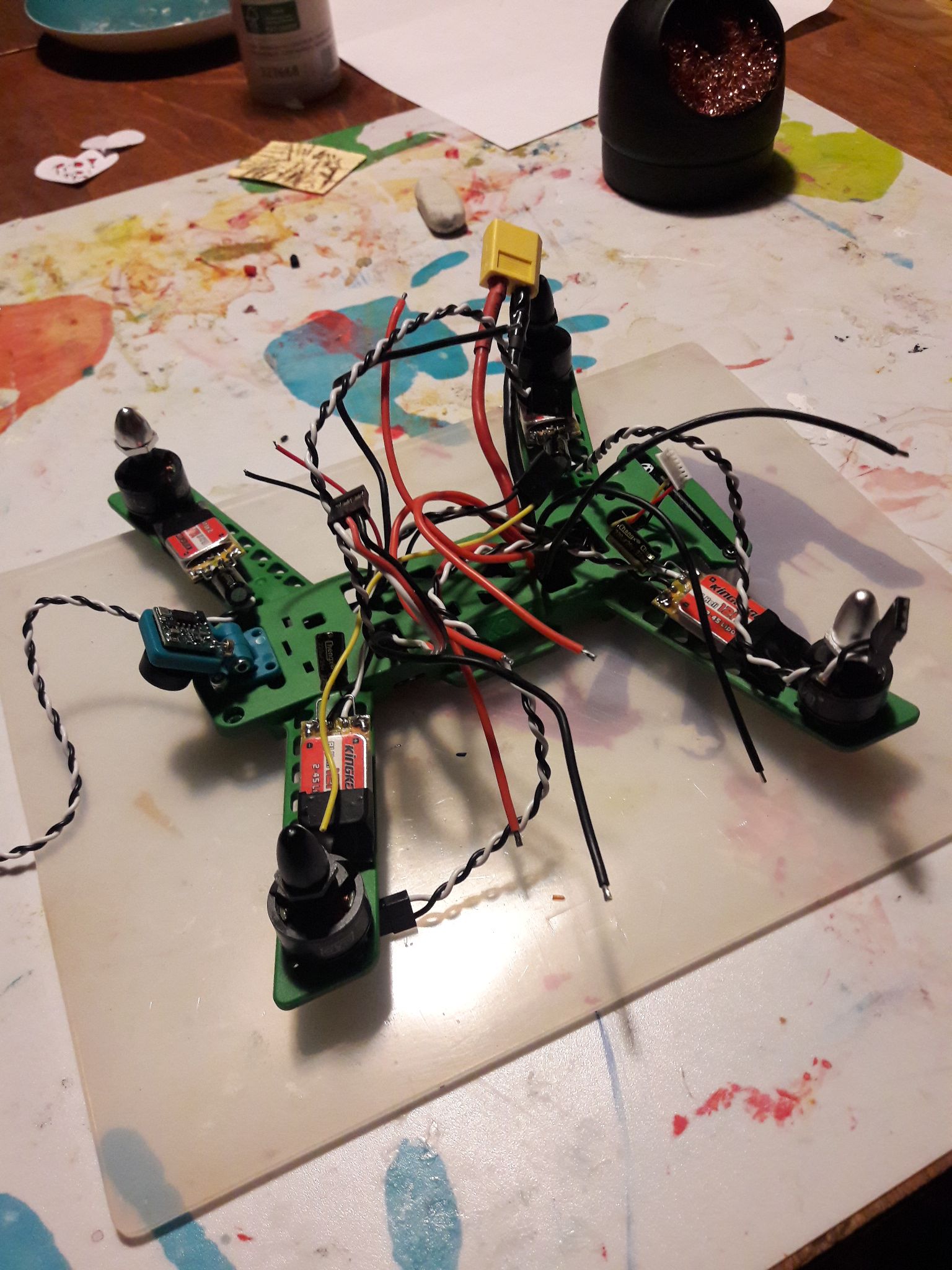
KK188 has integrated PDB with 5v BEC on the bottom. So first I strated with soldering all the wires to PDB so I can mount it first. This meant desoldering ESC power wires first and soldering them later. Same applied to camera and VTX wires. After that I shortened the wires to needed lenght and soldered them to quad components. Finally I mounted FC and connected all the wires.
Initial start and setup looked OK but I discovered one faulty motor during motor ESC calibration. So the DYS 1306 3100kv were replaced by Racerstar BR1407 3500kv that I ordered for other build.
I have flashed ESC with latest posible BLHeli 14.9.
FC flashed with Betafilght 3.1.7, set Oneshot125, receiver on Uart1 with iBus, Micro MinimOSD on UART3.
During hower test I found out that I switched ESC 1 and 2 which caused wierd yaw /roll flips. When put correctly copter howered just fine.
Realy flight test was not much successfull. Copter flies but it seems to react with some delay. I was playing with Gyro/PID loop times but that does not seem to help. Next I will try to downgrade to Betaflight 3.0.1.
Downgraded to BF3.0.1 with 1kHz/1kHz loops and it flied quite well. Just to be sure I flashed BF3.1.7 back and set 2.66/1.33 kHz loops (that is the most BF let me) and now it flies well also. I also changed props to Diatone 4025. That might helped aswell.
Photos











Wow, thats a great little build for the price! looks like a great way to introduce someone to the hobb.