
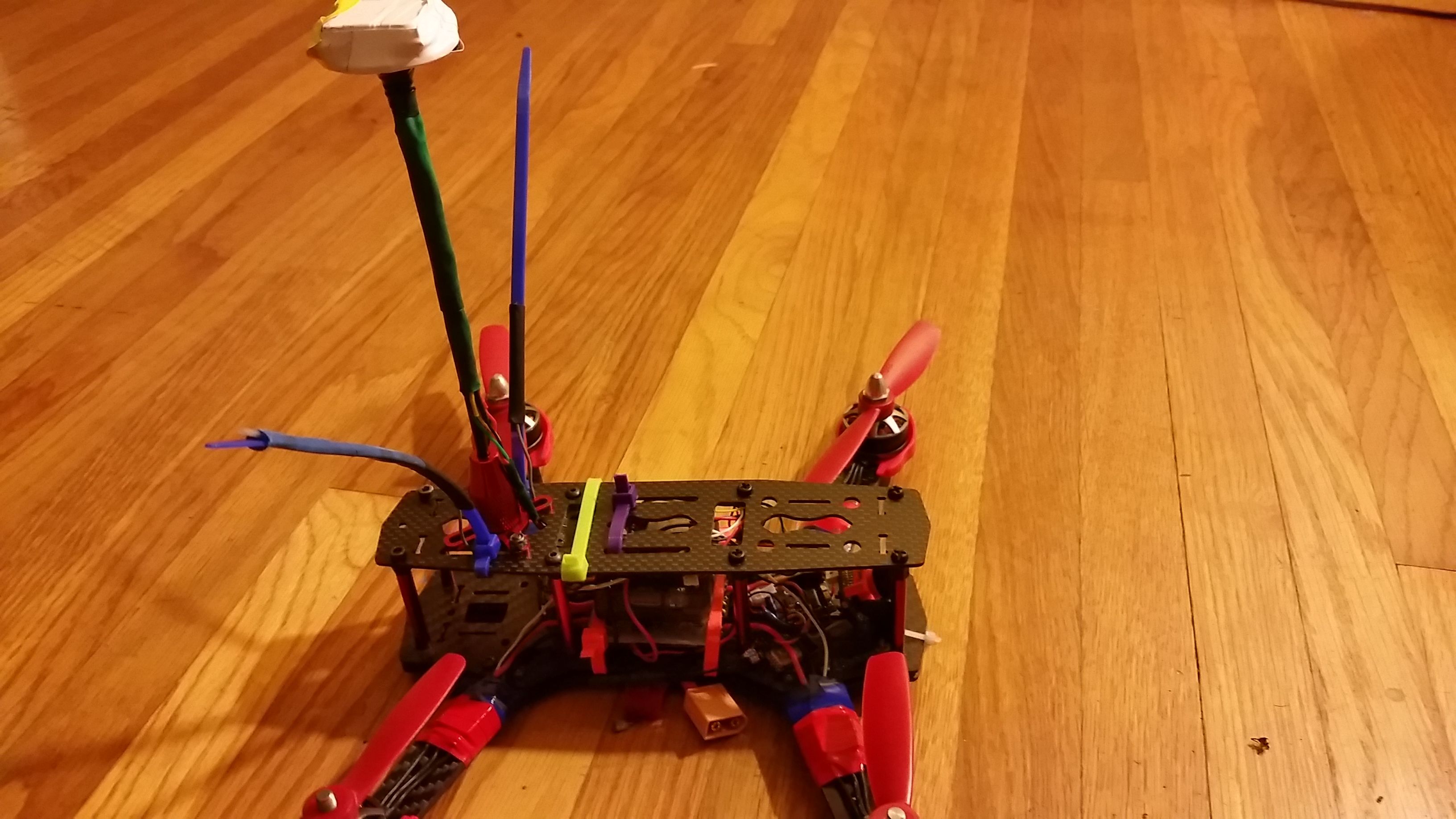
A 250mm quad capable of running on 4S. Includes OSD, 3DR Telemetry and GPS/Barometer/Compass, in addition to 2 RunCam cameras.
Uses include photo and videography, GPS navigation to survey/explore terrain, and waypoint missions for reconnaissance, etc.
Current configuration is as follows:
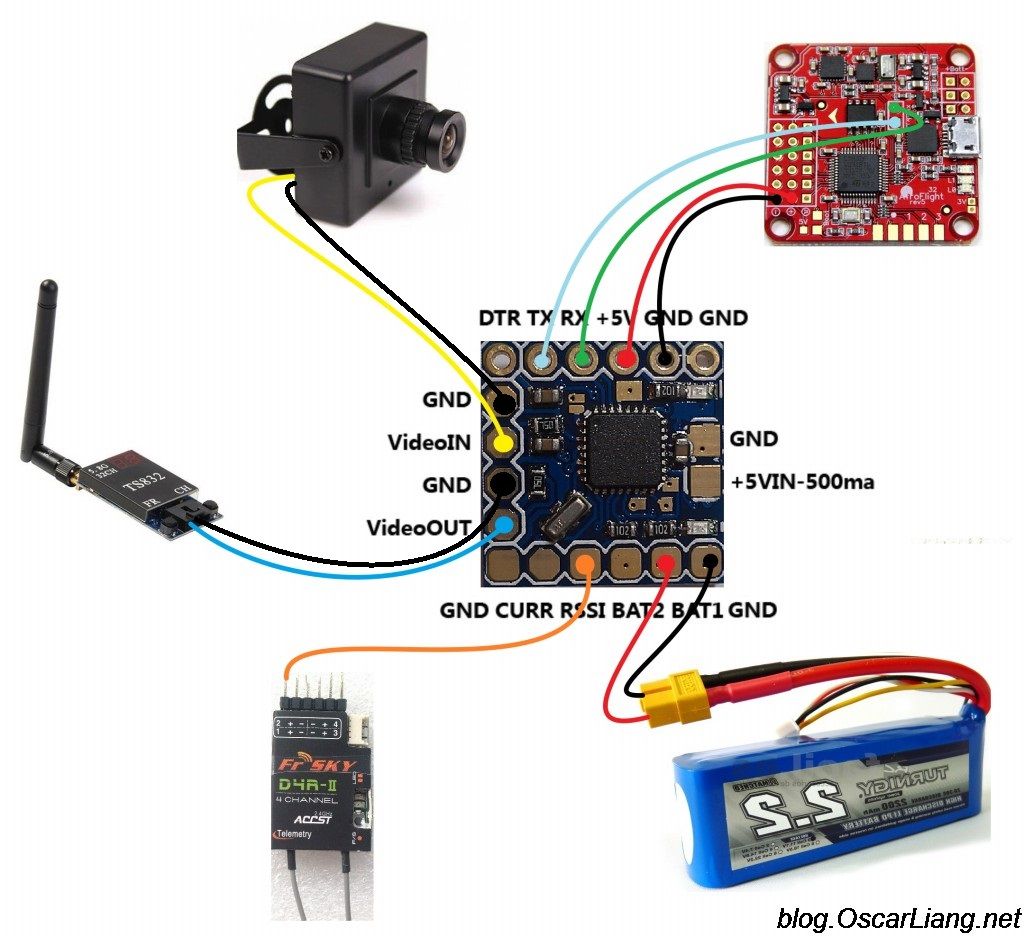
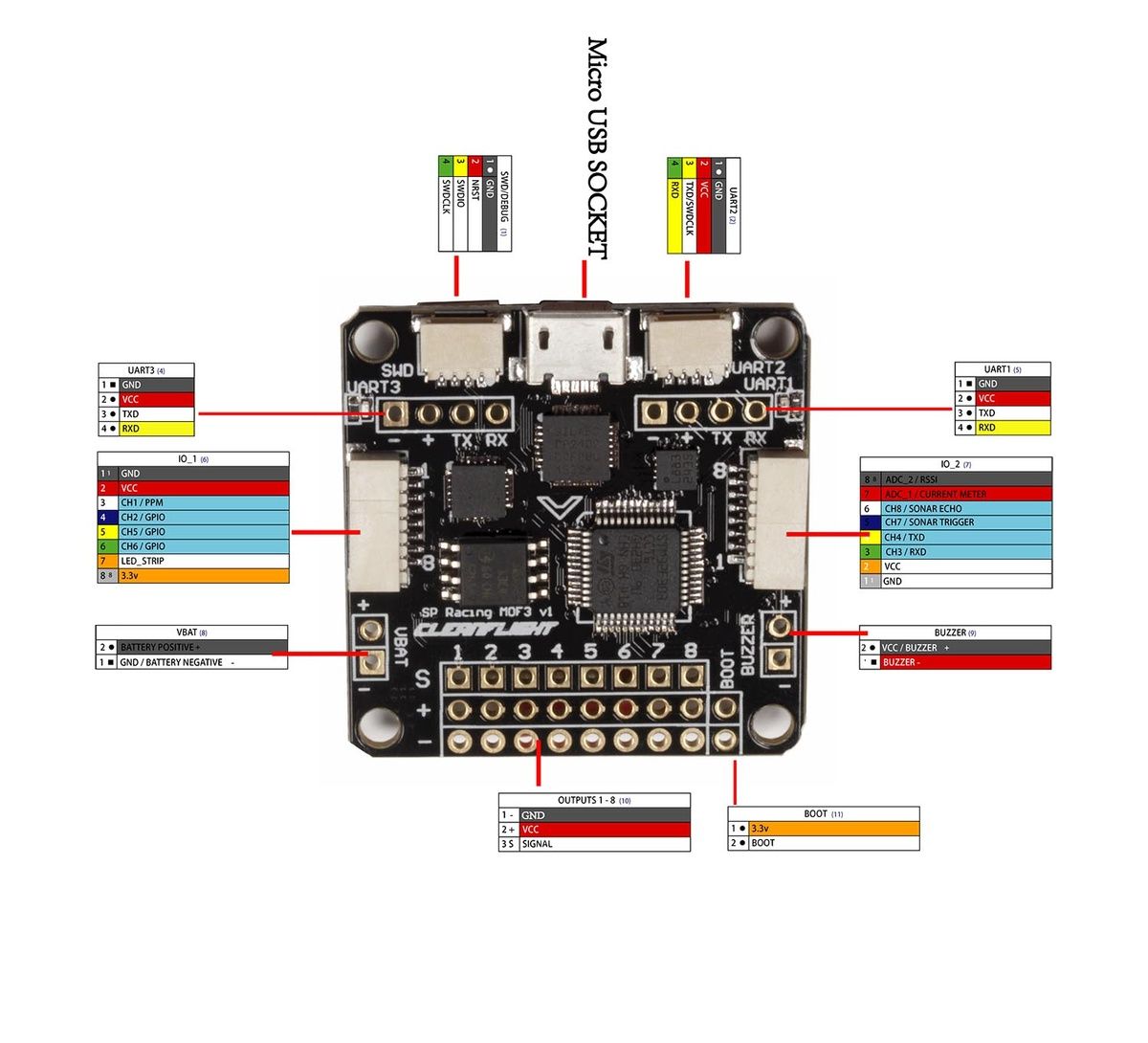
F3 board is powered by 5v BEC on PDB, to 8th signal pin. RX is on UART3 by breakout adapter. OSD is on soft serial 2. GPS is on UART 2. Telemetry is on UART1, shared with USB.
Camera and VTX is powered by 12v from PDB, OSD by signal 7 pins on FC.
Photos

Part List
Show stores (10)Guides & Reviews

AirbladeUAV has done it again and this time they've brought long range to the 5" class! Based on the popular Transformer Mini, the new Transformer 5" Ultralight adopts a lot of the same design philosophies with larger props and more payload capacity. It can fly upwards of 20 minutes on a 4 cell Li-Ion battery pack and in ideal conditions it's got a range of over 4 to 5 miles. In this guide I'll walk..
Read more
With the release of the DJI FPV Drone cinematic FPV has become a lot more accessible, but you certainly don't want to crash a $750 drone! The QAV-CINE Freybott is a compact, lightweight cinematic FPV drone that can take a hit and keep going. It's a lot safer to fly indoors and around people. With a naked GoPro or the SMO 4k you can capture some great stabilized footage. In this guide I'll show you..
Read more







A few things that I've noticed... iNav 1.5.1 is the latest release that will work with the mag/baro on this (clone) SP Racing F3 Deluxe. iNav also doesn't have proper serial passthrough, so I've been dumping the config and flashing to cleanflight to flash the ESC's or adjust the OSD, then flashing back to iNav and reading the config.
Additionally the OSD was somewhat tricky to setup, needing to be powered after the serial adapter was plugged in. Also had to find version 1.6.8 of scarab-osd to match the mwosd configuration version.
spracing f3 including manual: http://seriouslypro.com/spracingf3
Scarab-OSD 1.6.8: https://github.com/ShikOfTheRa/scarab-osd/archive/v1.6.8.0.zip
iNav docs for spracing f3: https://github.com/iNavFlight/inav/blob/master/docs/Board%20-%20SPRacingF3.md
I've since been running betaflight, after trying cleanflight for a bit. It flys decently, but something is off, I think the PIDs are too high, the quad jerks after a heavy yaw.
So after installing the ZMR 250 PDB from massiverc.com, the build is a little cleaner.
I've realized that I was sold a clone sp3 board, of which only the barometer works a little better than eying it, but otherwise the board is decent.
Running Betaflight 3.1.7 with Dshot150. Also added an esp8266-01 which let's me connect wirelessly to the CLI and configurator, in addition to allowing wireless access to EZ-GUI, which has voice feedback - a poor man's taranis.