
Packed with a lot of 'safe' fun! I just a dRonin compatible Mini OWL with a good outdoor camera. This one Just behaves like a bigger inductrix with a bit more of everything.
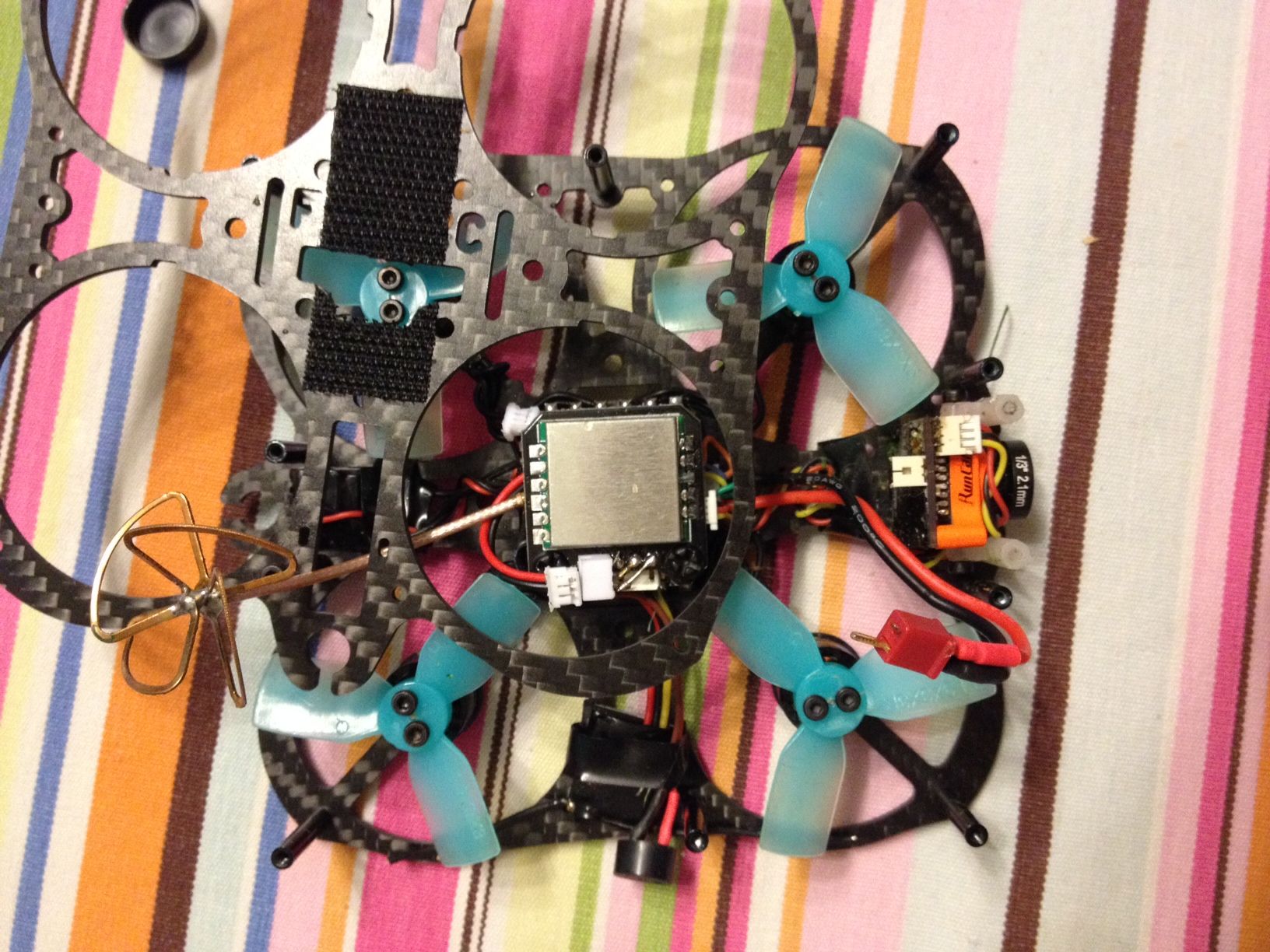
Originaly built as a standard (motors right side up) quadcopter, this quad was reworked as a pusher (motors “upside down”). This yields two major benefits: first the efficiency and autonomy is much better, and second the fitting the camera is much easier.
With motors right side up, fitting the microswift/micro-arrow requires to remove the video connector in order to exit the video cables in front of the camera (i.e away from the props). A CCD camera makes a big difference for whoever wants to fly outdoor. This quad was originally fitted with a microswift that died after a few months of fun. I replaced it by a micro-arrow that was highly discounted. Low light handling is better with the micro-arrow but I liked the micro-swift better outdoor.
The innova OSDVTX is really nice on these, it may need external UBEC depending on the number of accessories flight controller has to feed, power must be limited to 25mw, and one should upgrade MWOSD using VTX branch (https://github.com/ShikOfTheRa/scarab-osd/tree/VTX) with free MWOSD R1.6 GUI (not 1.7). Note that the MWOSD team is currently merging the VTX branch, so this VTX will soon accept the offical MWOSD (not tested yet).
Autonomy was limited to 2min30 with the leightweight 350mah nanotec. Made a few more experiments but bottom line is : battery should weight less than 50gr. Heavy battery (high capacity or Graphene) is not a solution as I could only get 3min15 with a 800mah battery and the aircraft felt really heavy. In the end I've rebuilt the frame as a pusher layout together with the latest Hulkies props and dropped as much dead-weight as I could: aluminium/titanium screws, standard whip antenna, lighter foxeer camera, no more bec, no more diversity satellites as it requires a BEC, etc... Autonomy is ~4min with nanotech 450mah!
dRonin makes the PikoBLX really gentle and it holds horizon quite well (dRonin new vibration filtering rocks).
Photos


Part List
Show stores (3)
Can you post more pictures of how you mounted the micro swift?

More details on the MicroSwift mount : FlexRC sent some 3D printed pilar with eyelets that can be used to mount the camera.
I had to unsolder the video plug and solder it back to the front of the camera in order to keep the video cables away from the prop wash.
This being said, the quad-copter efficiency is 10% higher when motors are facing down. In this case the video cables are above the prop wash, so no need for complex soldering.
Guides & Reviews

AirbladeUAV has done it again and this time they've brought long range to the 5" class! Based on the popular Transformer Mini, the new Transformer 5" Ultralight adopts a lot of the same design philosophies with larger props and more payload capacity. It can fly upwards of 20 minutes on a 4 cell Li-Ion battery pack and in ideal conditions it's got a range of over 4 to 5 miles. In this guide I'll walk..
Read more
With the release of the DJI FPV Drone cinematic FPV has become a lot more accessible, but you certainly don't want to crash a $750 drone! The QAV-CINE Freybott is a compact, lightweight cinematic FPV drone that can take a hit and keep going. It's a lot safer to fly indoors and around people. With a naked GoPro or the SMO 4k you can capture some great stabilized footage. In this guide I'll show you..
Read more







What pins did you connect the micro osd vtx to? Also, how can you set the power input on it?
FuriousFPV had lots of problems with these boards, connection diagram for this product have been removed. Here is an old link with all possible diagrams https://www.fpv4drone.com/fr/recepteurs-emetteurs/355-furious-vtx-osd-innova.html .
V1 board (i.e the one without built-in BEC) should be powered through the led "output" port, this may seem strange but this is what FFPV was recommending. Bear in mind that when used in conjunction with the PikoBLX, the OSD is linked to UART2 (not UART1).
Okay, I happened to recive a v2 board, any difference?
This one (V2) has a built-in BEC, so it get its power supply from the Bat+Bat- pin. In the V1, these pins are only used to sense voltage while here they also feed the board. So no risk to max-out the BEC of your flight controller (the Piko BLX has a weak BEC).