
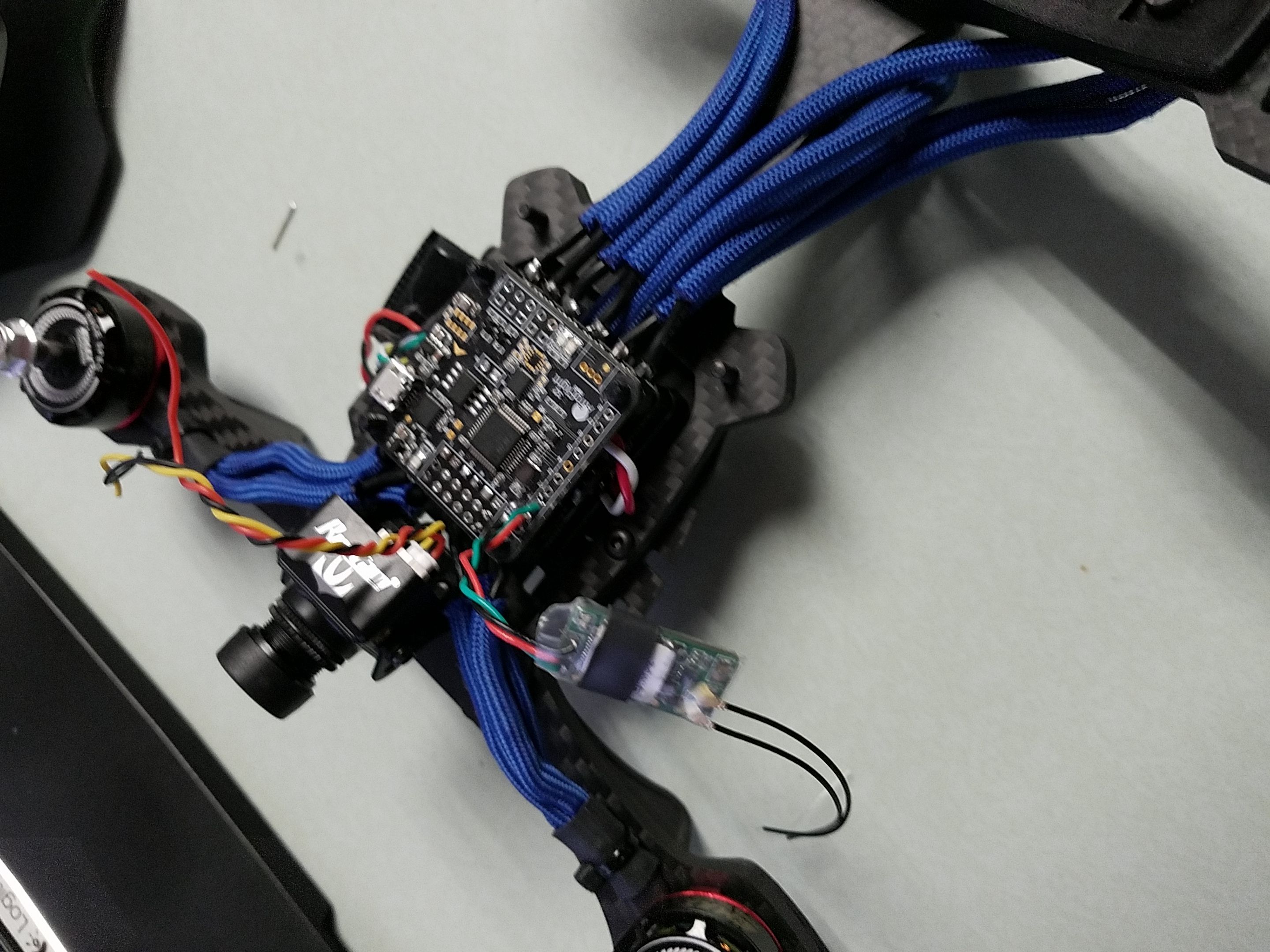
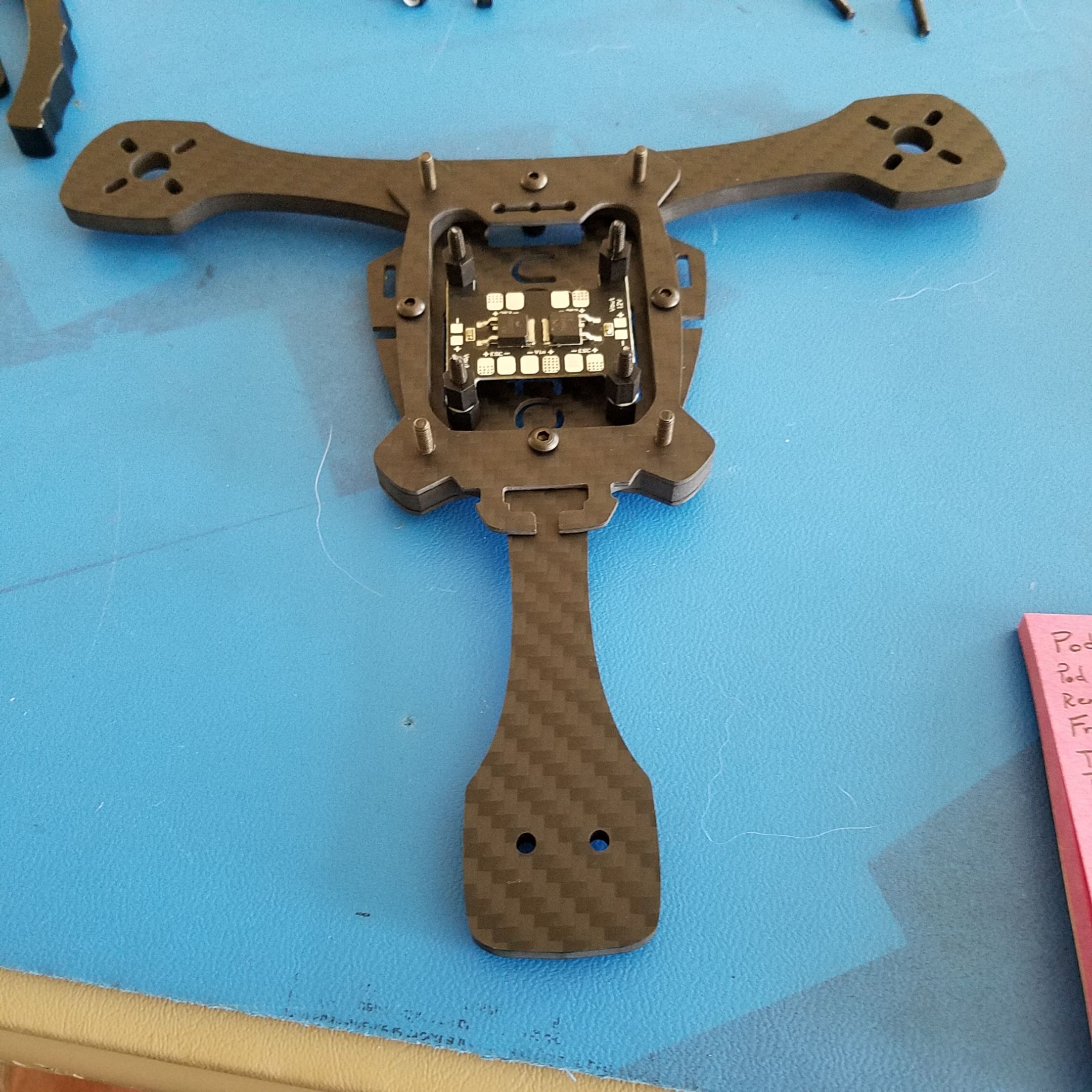
This is my build for the Neato Widowback. This is my favorite frame hands down. It is currently being tested. There probably will be many more changes to this frame as it is continued to be developed.
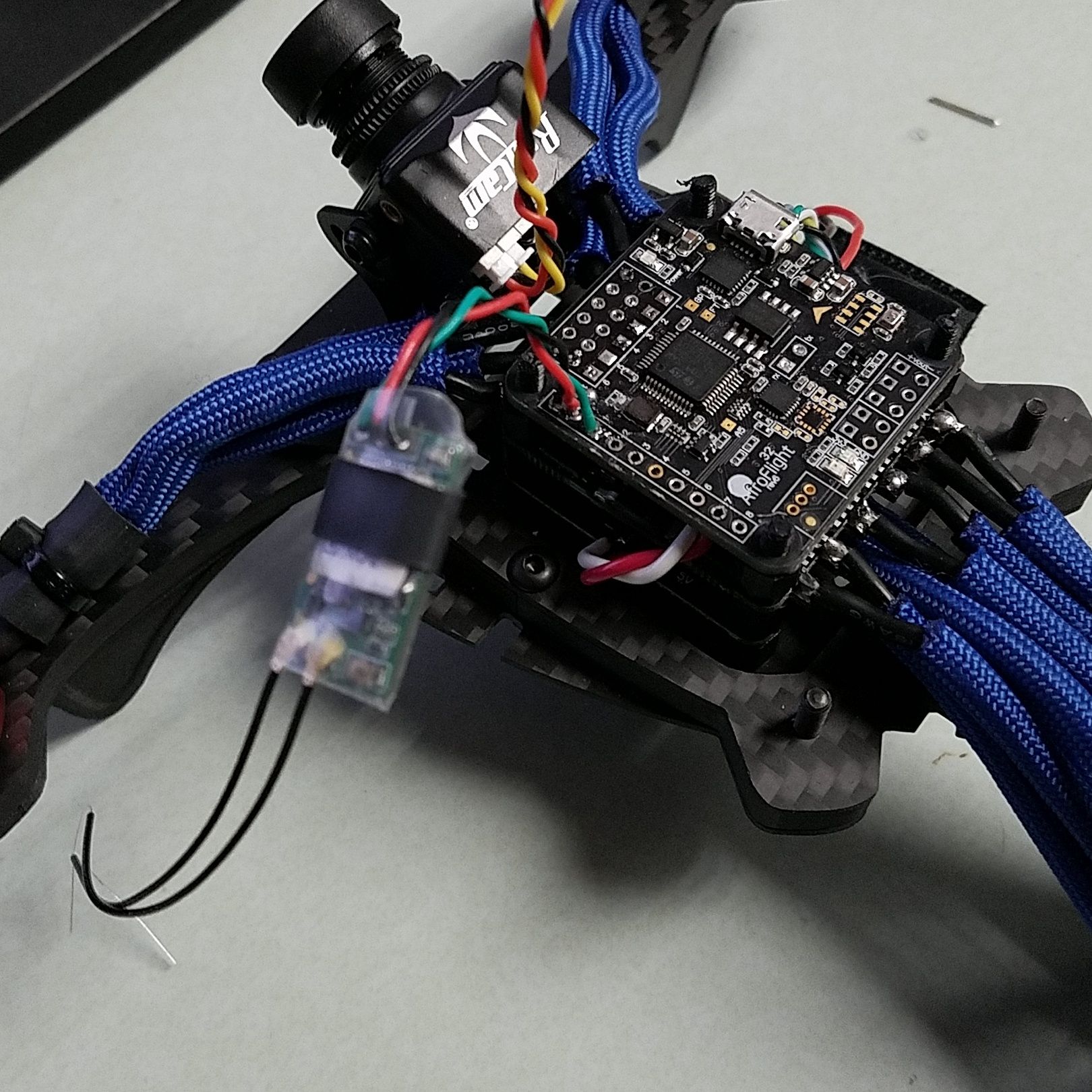
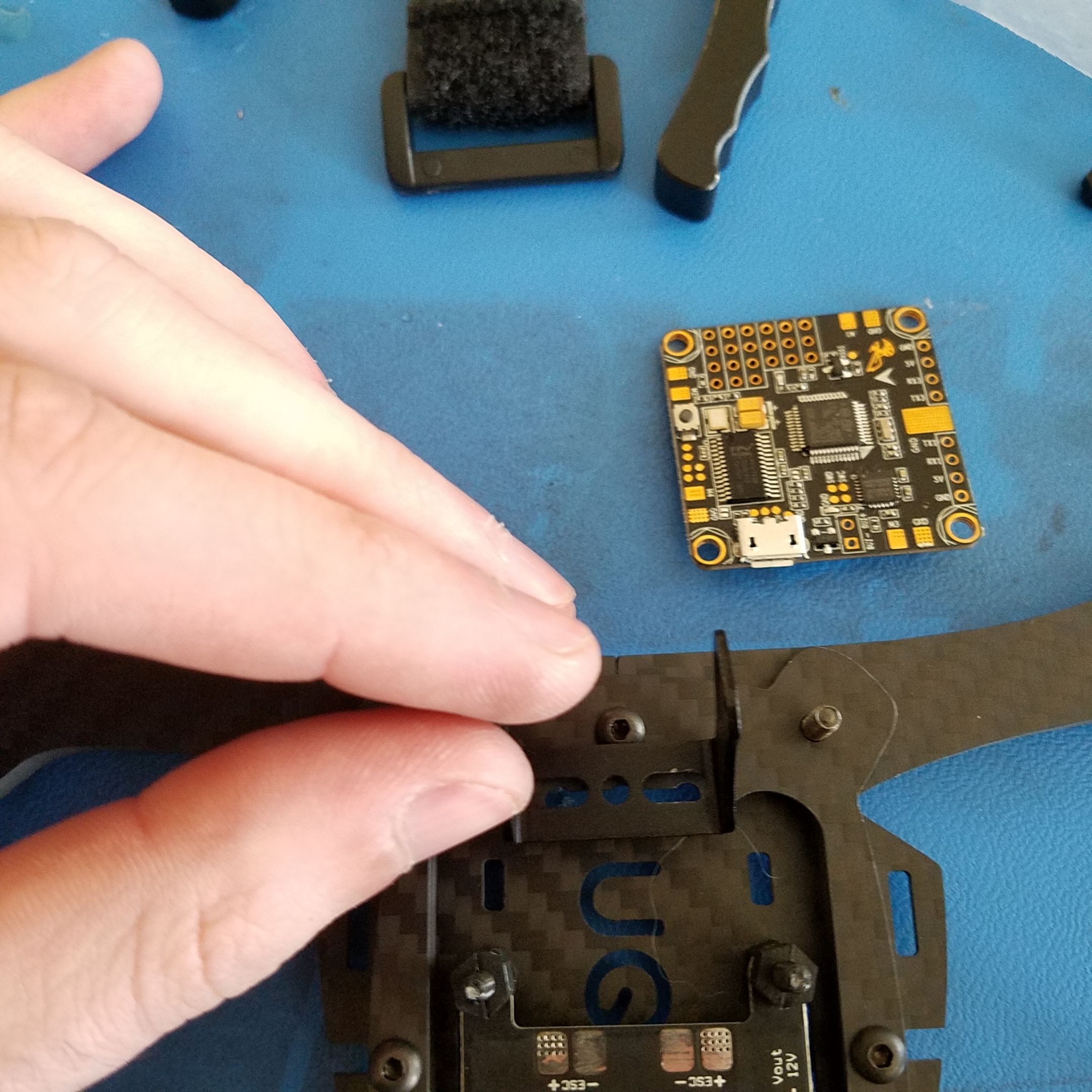
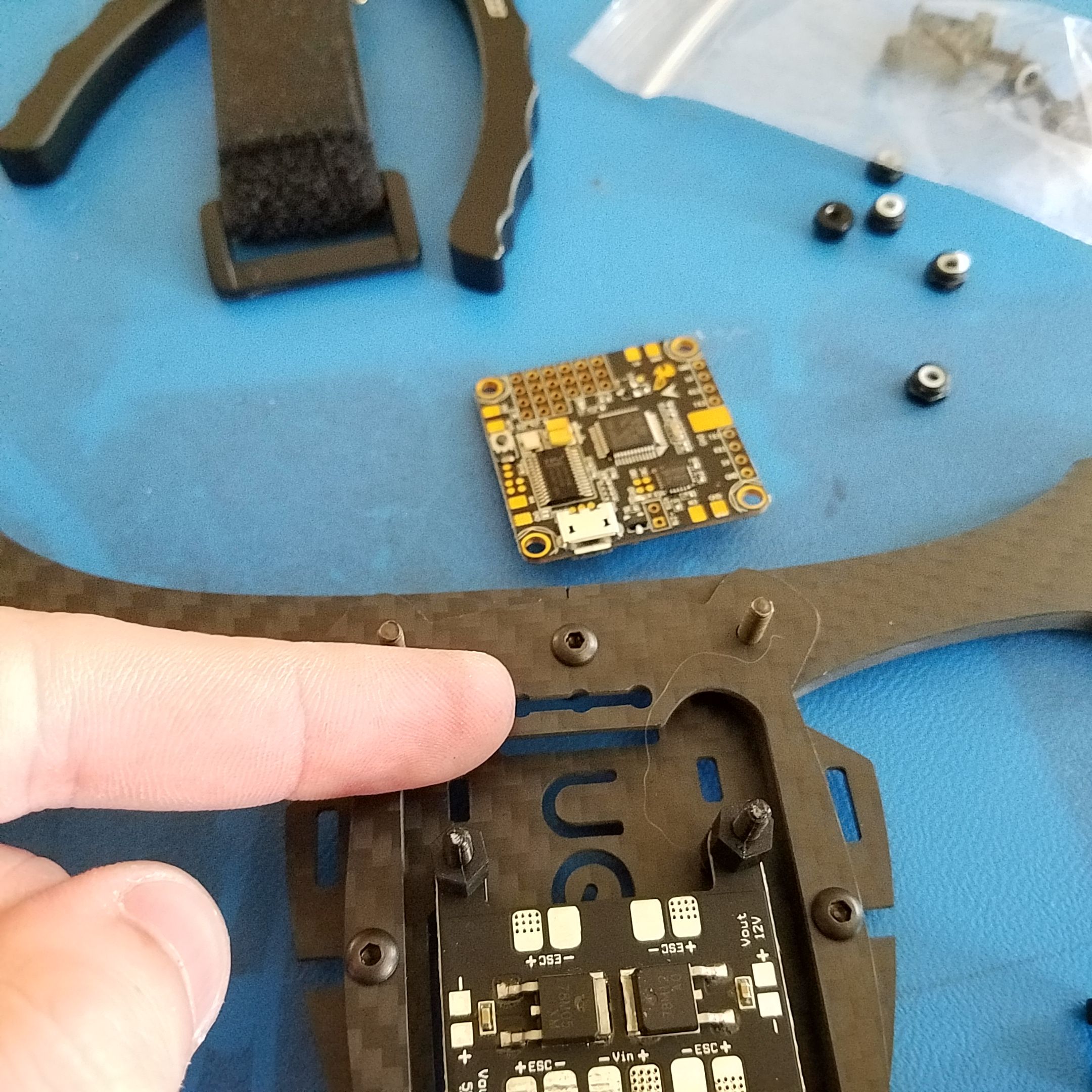
Quick note for the build though. I don't think I have had a flight controller more buggy and problematic than the Betaflight F3. I STRONGLY advise against going through this. I had to download the IDE and modify the code to get it to work as the Betaflight configuration tool didn't want to play nice.
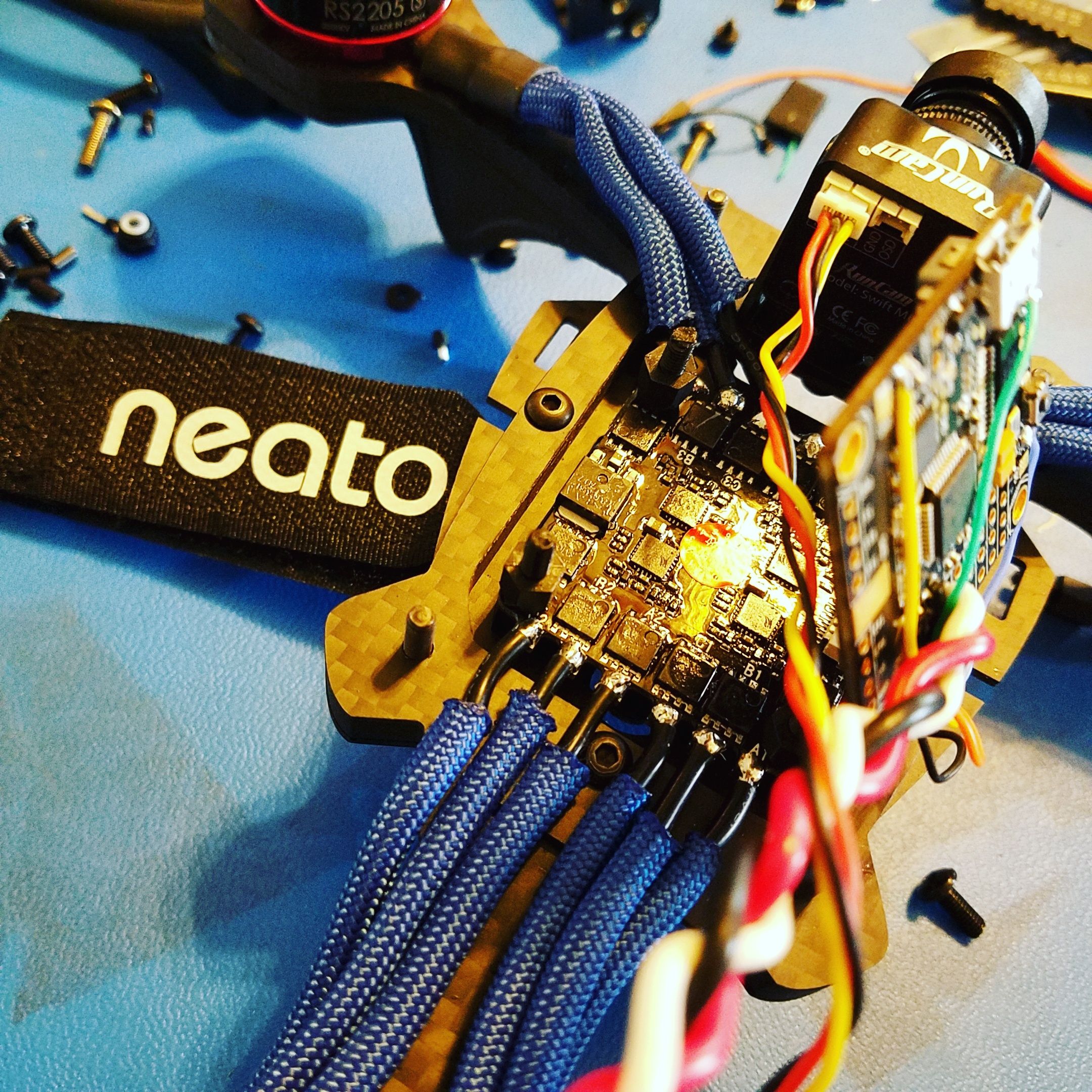
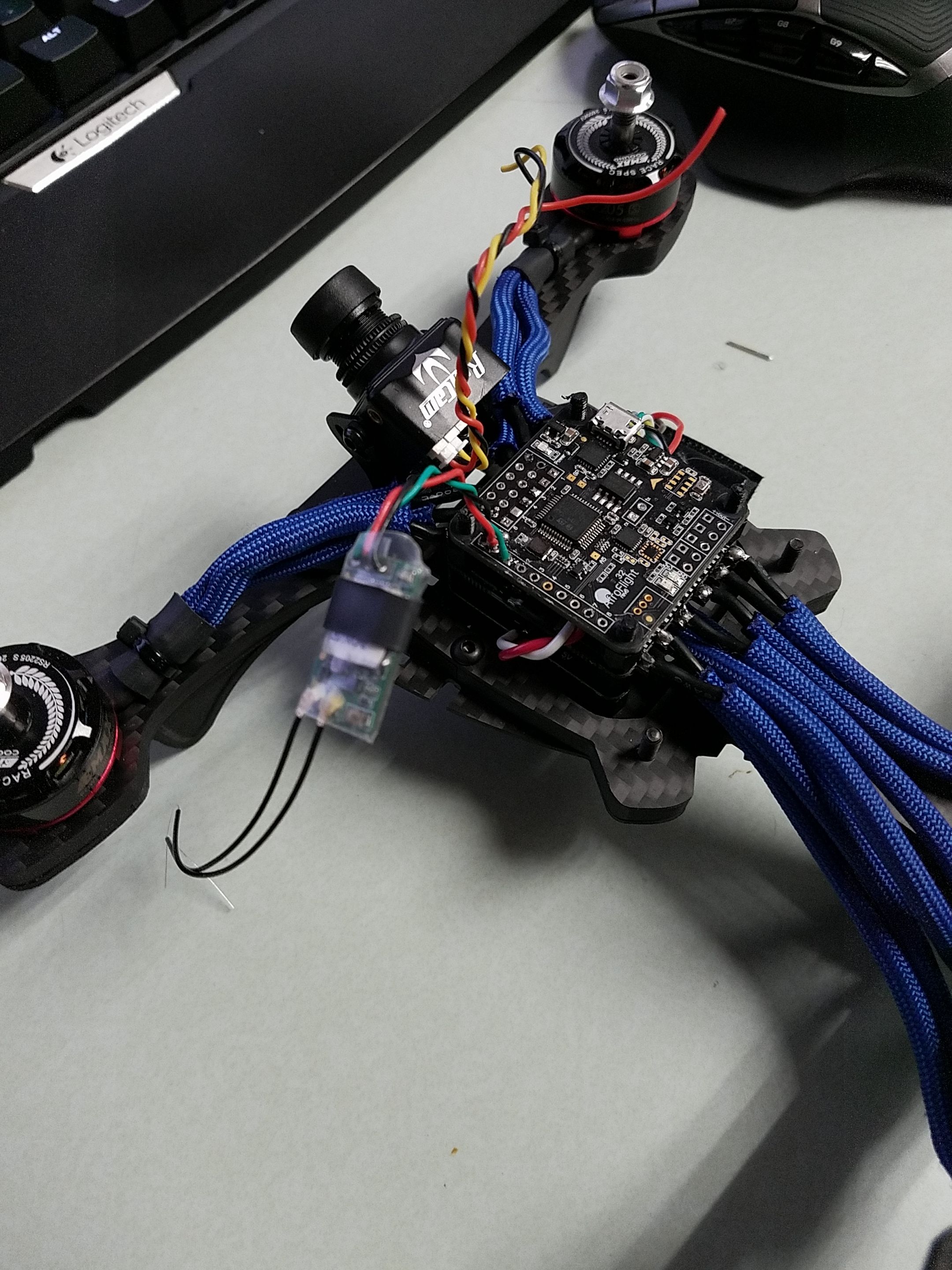
Photos





















Part List
Show stores (7)
What is that mesh like wrap around your wires called?

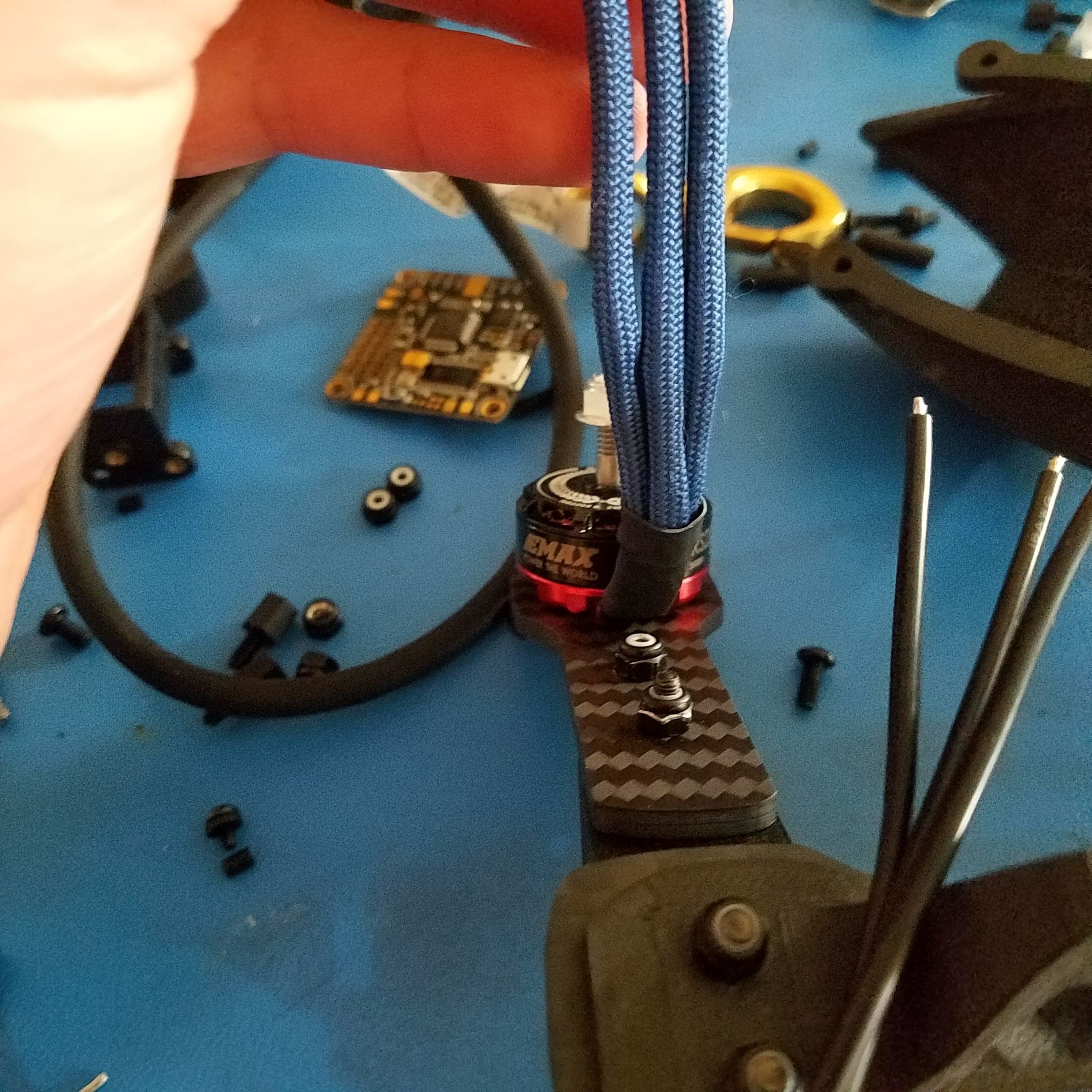
The frame looks really really interesting! Did you have to do any special configuration on Betaflight, considering the rear motors are upside down?
Also, I can imagine breaking props on the rear motors very often because of the angle, and well, landing is hard sometimes. Haven't you experience that?

Betaflight has a configuration for V-tails which makes it a lot easier. As for the rear motors, all you need to do is put the propellers on upside down as well and it acts just like the motors are right side up! So far I haven't broken a prop, they also designed some landing gear to help with landing and not slamming your props on the ground. I removed it though and I had some issues with vibrations on the back end when I utilized the landing gear. When I land I hover a few inches from the ground and disarm.








How does the V tail effect you experience? What are the benefits?
So, with the v-tail you do lose thrust on the back end, and it makes it feel sort of "swoopy." It is very similar to a tri-copter in a lot of ways. What I really like about the v-tail though is that despite the lack of thrust on the back end, your yaw and roll work together taking less effort (in my opinion) on the sticks to maintain a smooth turn. Hopefully that answers your question!
Do you race or freestyle?
I actually haven't gotten into freestyle yet. I am currently working on a freestyle quad though! I am a race guy so far.