
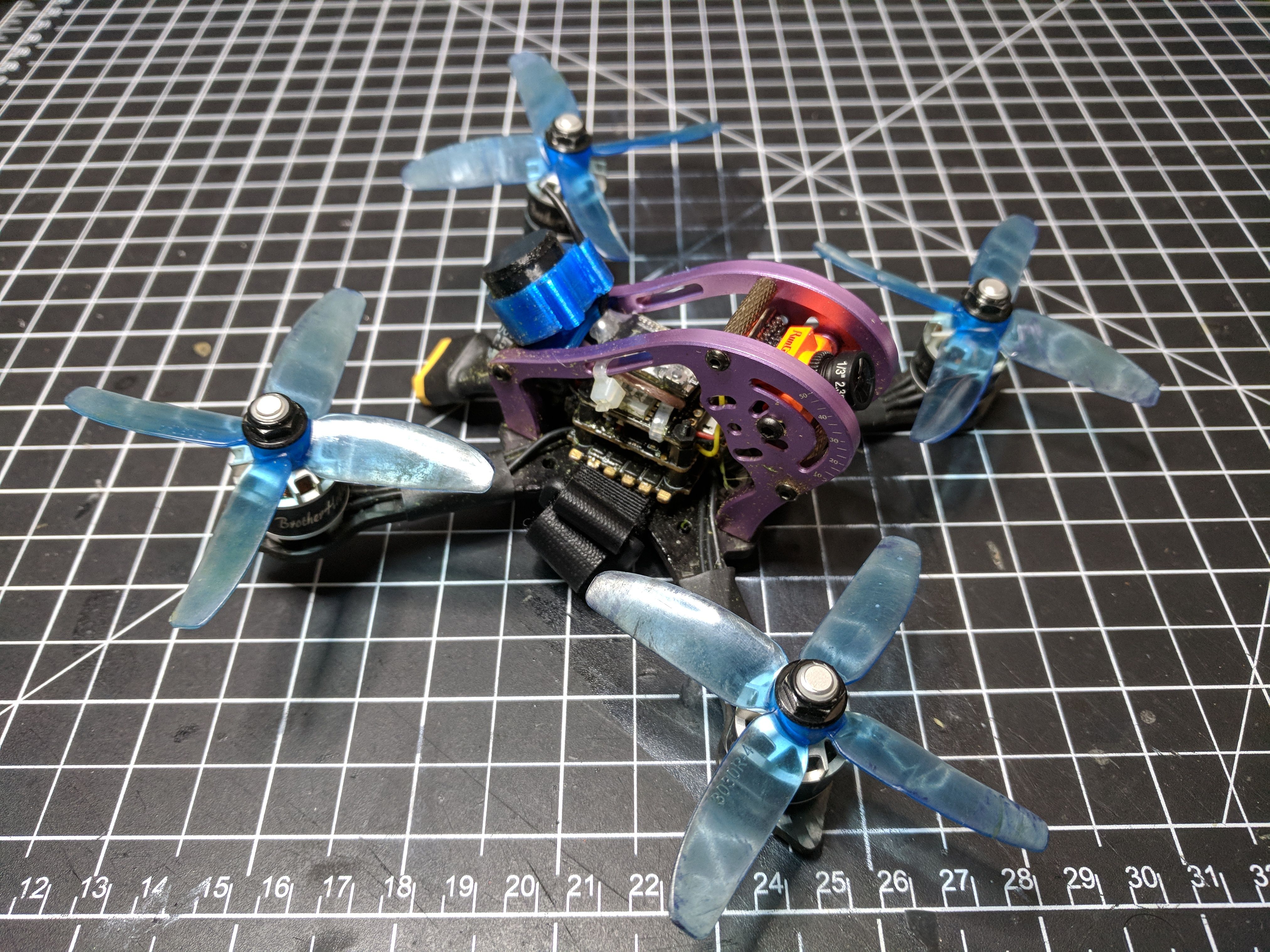
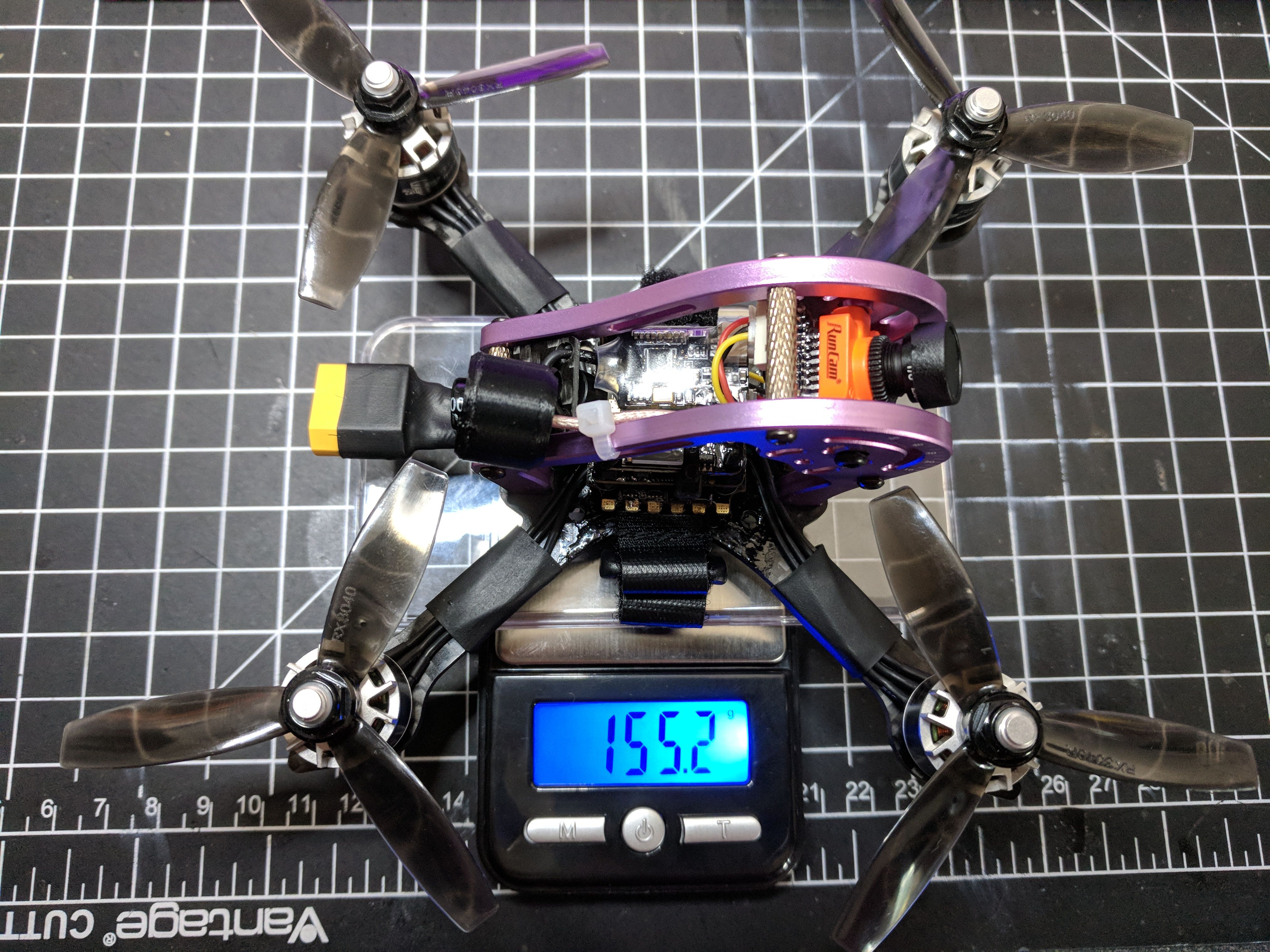
My 3" build. Something small and easy for those quick outdoor flights over the winter.
- Conformal coated everything before soldering. Touched up over the solder points after soldering. I had a situation at a rainy race, where one motor failed to spin at the line, but then started working again back at the bench. The Quad had everything conformal coated pre-soldering, but I didn't touch up post soldering, so I'm guessing a water drop bridged a motor connection. Here's hoping I'll have fixed that and have a good winter flyer.
- Liquid electrical tape under/around the stack as extra insurance.
- Used steel screws to attach the HGLRC stack to the base plate.
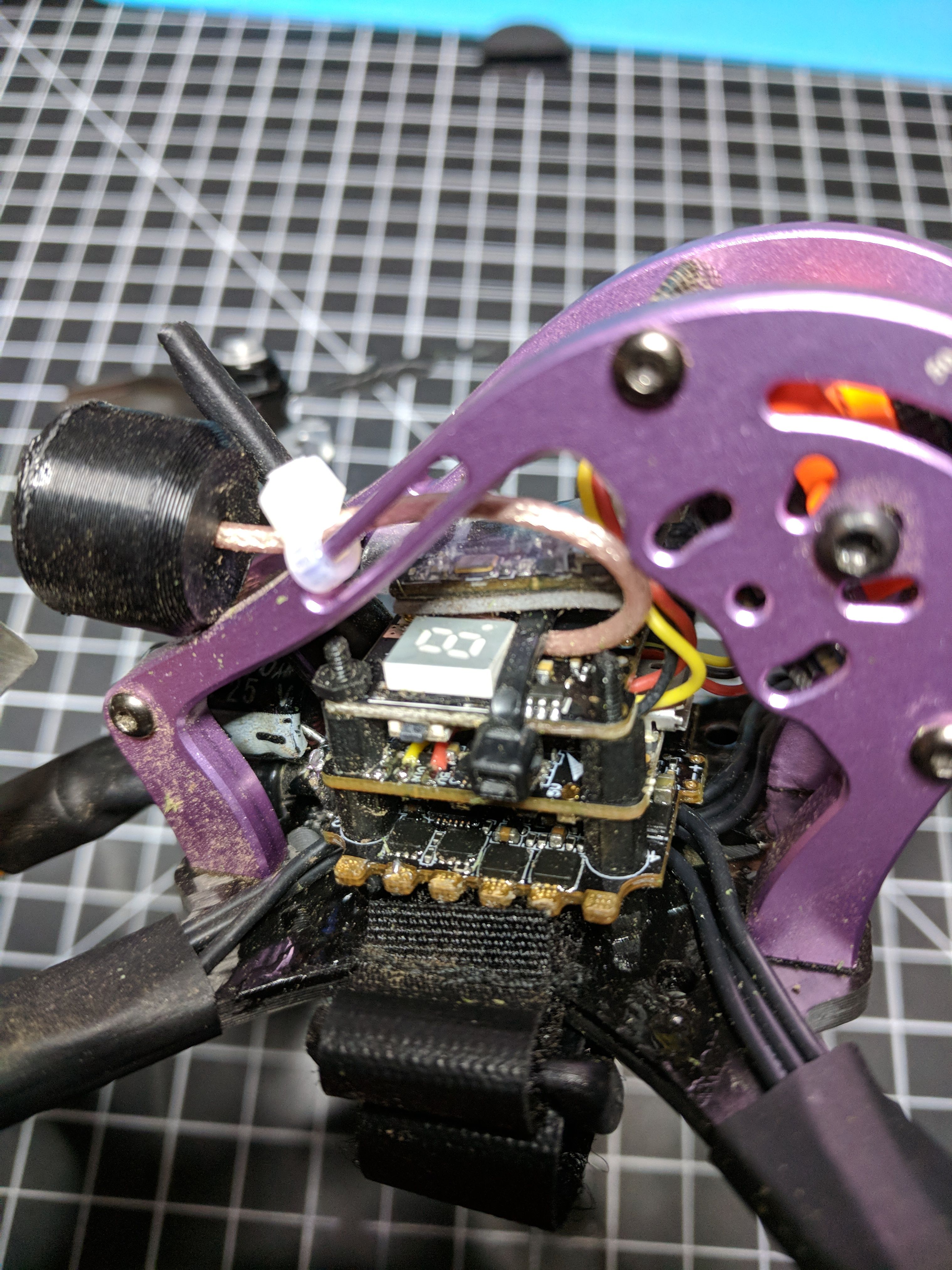
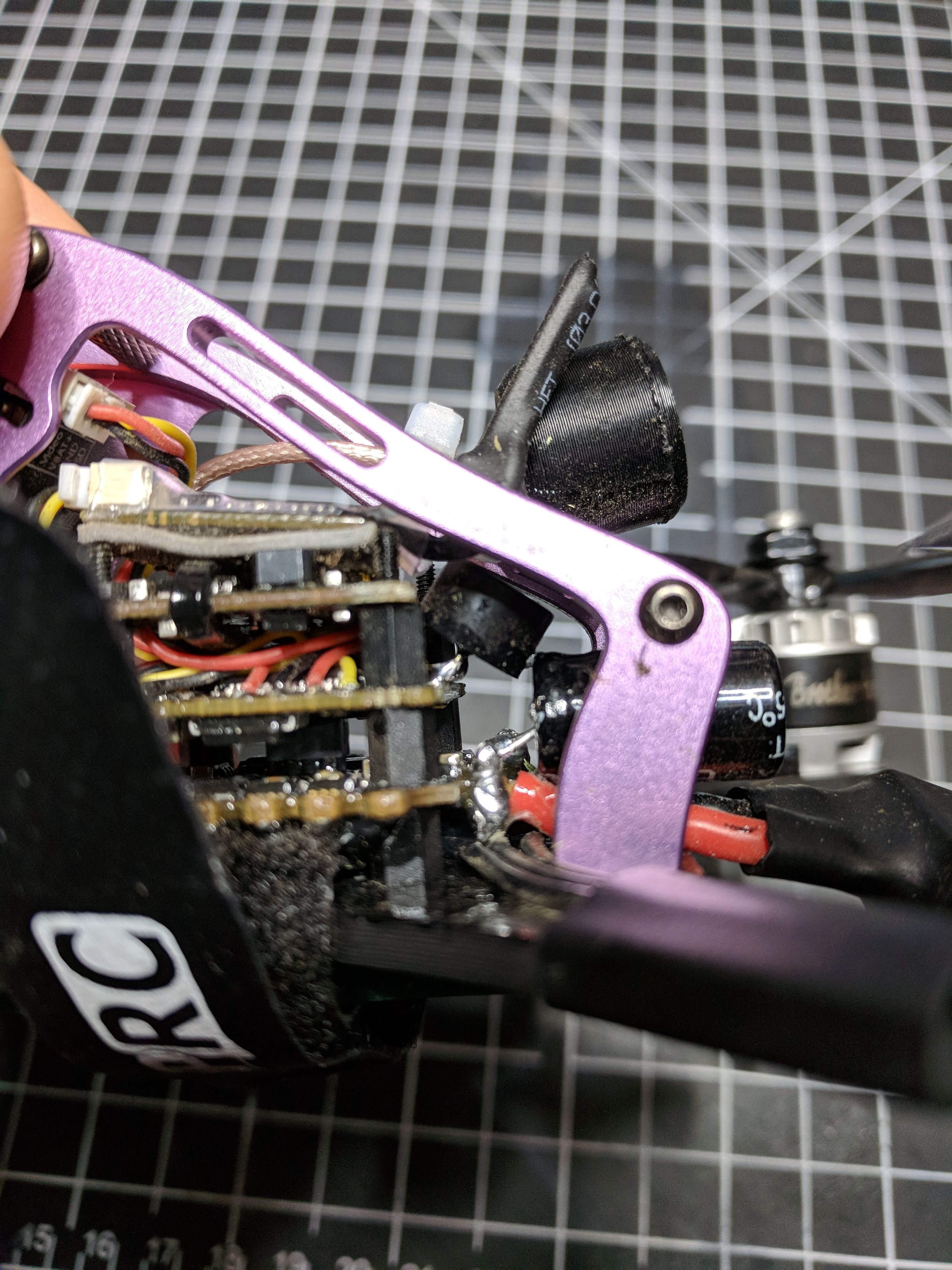
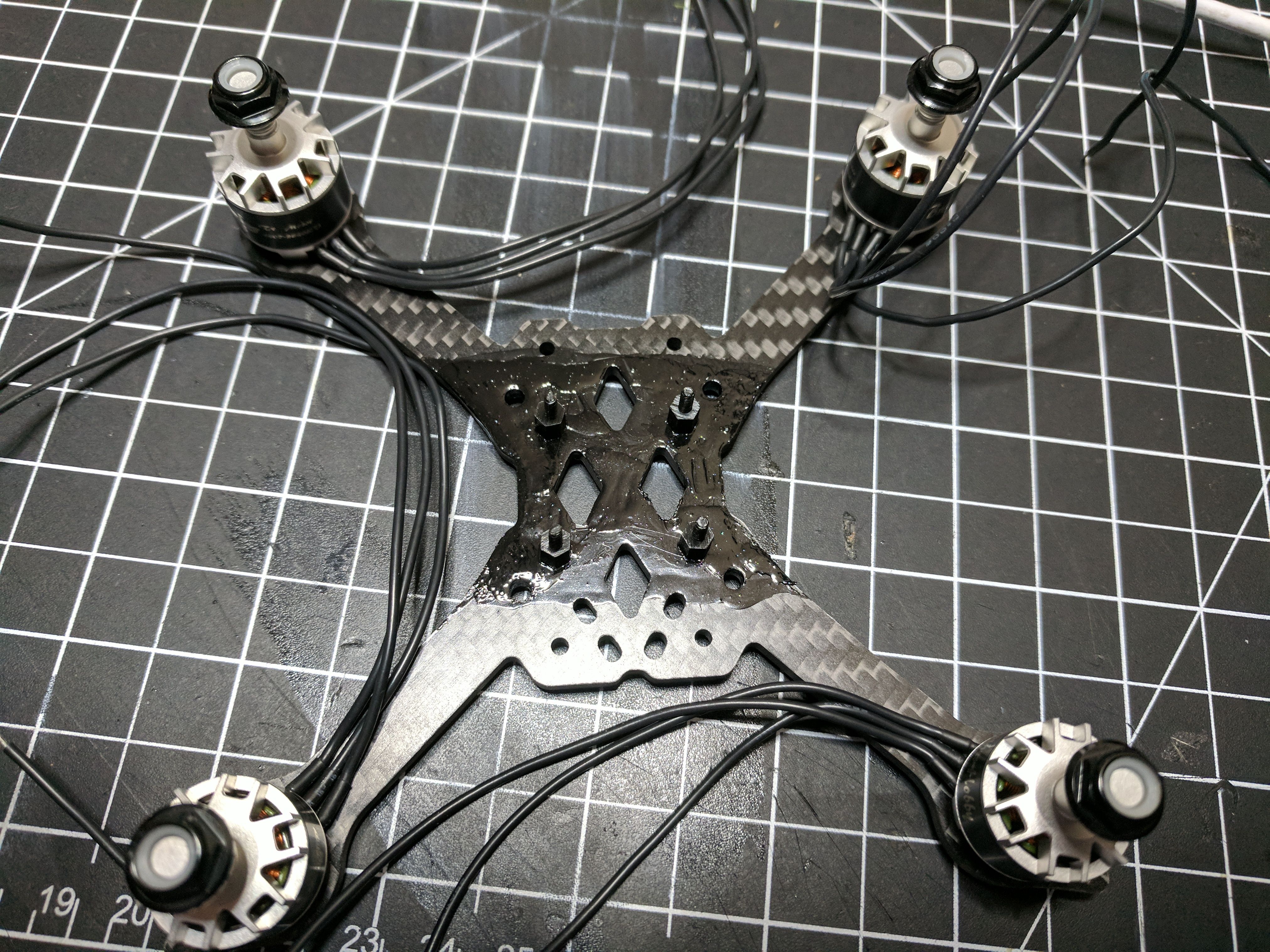
- Routed motor wires under the ESC - Kind of a pain in the ass, probably won't do that again, would be just as neat over the ESC.
- Heat shrinked the wires to the arm to keep things neat - easy to find heat shrink that fits over the arms on a 3" :)
- Used 16awg for the lipo leads, hope its enough, but its the biggest I could get to attach securely to the woefully undersized lipo pads on the ESC. Soldering the lipo leads to the ESC was really hard. I soldered them to the bottom of the board, but they detached and lifted the pads when I tried to secure the leads with a ziptie. I ended up soldering a bare wire as a bridge between the pads on the top and bottom of the boards, with liberal solder to keep things all together and act as strain relief. Lets hope it stands up to the current flow - the ziptie should help protect it from the lead getting yanked. I'll probably need to buy a replacement at some point.
- Added a 1000uf 25V capacitor to the top of the lipo pads. Note that doing so means there is no room to add the LED strip.
- Soldered micro buzzer direct to the buzzer pads on FC - sits nicely right above capacitor
- Ziptied ufl lead to the vtx to keep it from popping off.
- Ziptied near the AXII end of the vtx antenna to the frame - too much of a pain to route it through the antenna holder CF plate. If I switch to a SMA+Stubby AXII, then I'll use the plate.
- VHB taped receiver to the top of the vtx. and ran the antenna up through one of the holes on the antenna plate. Added a ziptie/heatshrink to stop it flopping around. Unsure of the range I'll get on the FS82, but the X6B just seemed too big to fit. Used the DSMX pad for IBUS, and got 5v/Gnd elsewhere. The DSMX pad maps to UART1.
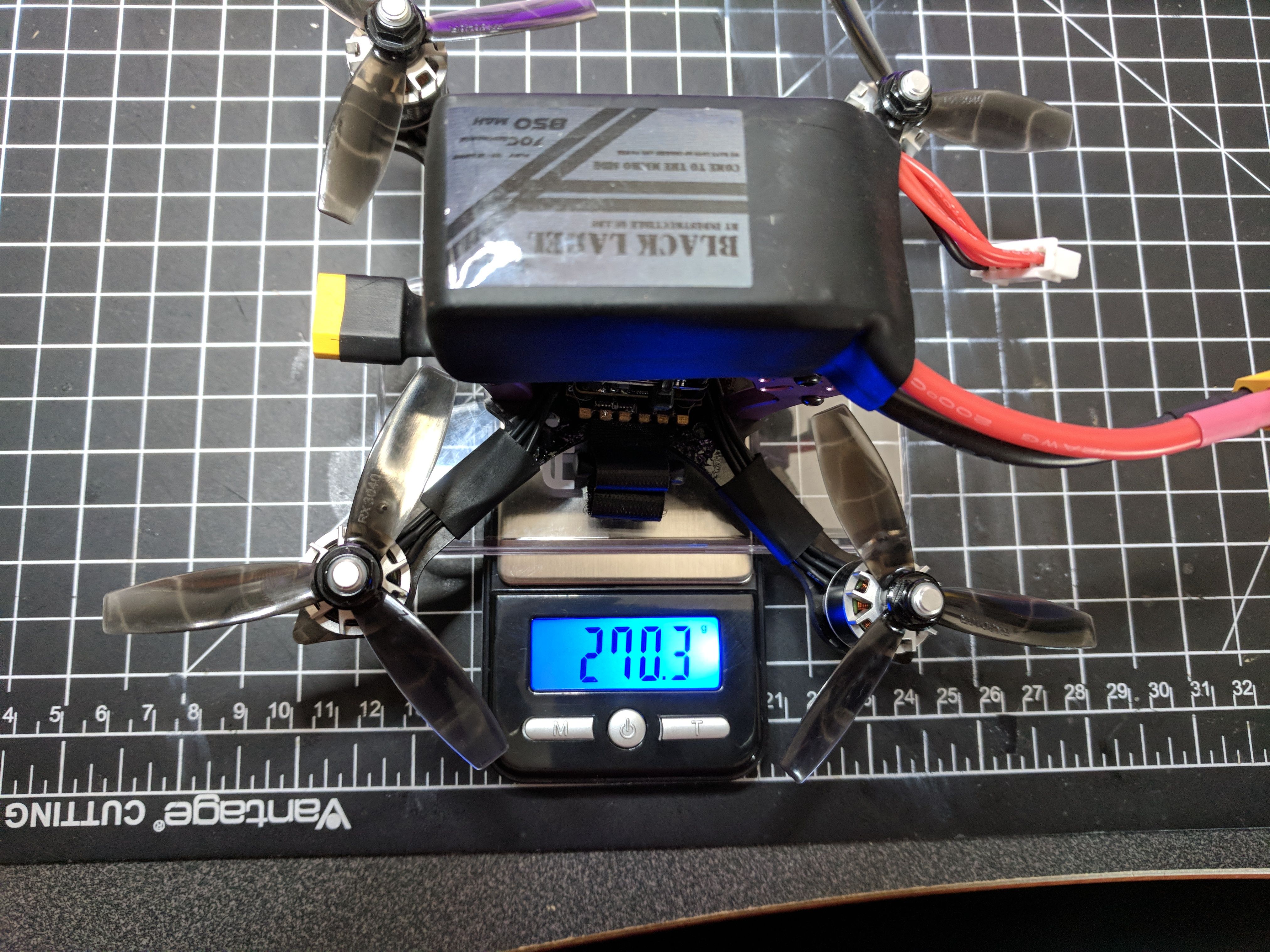
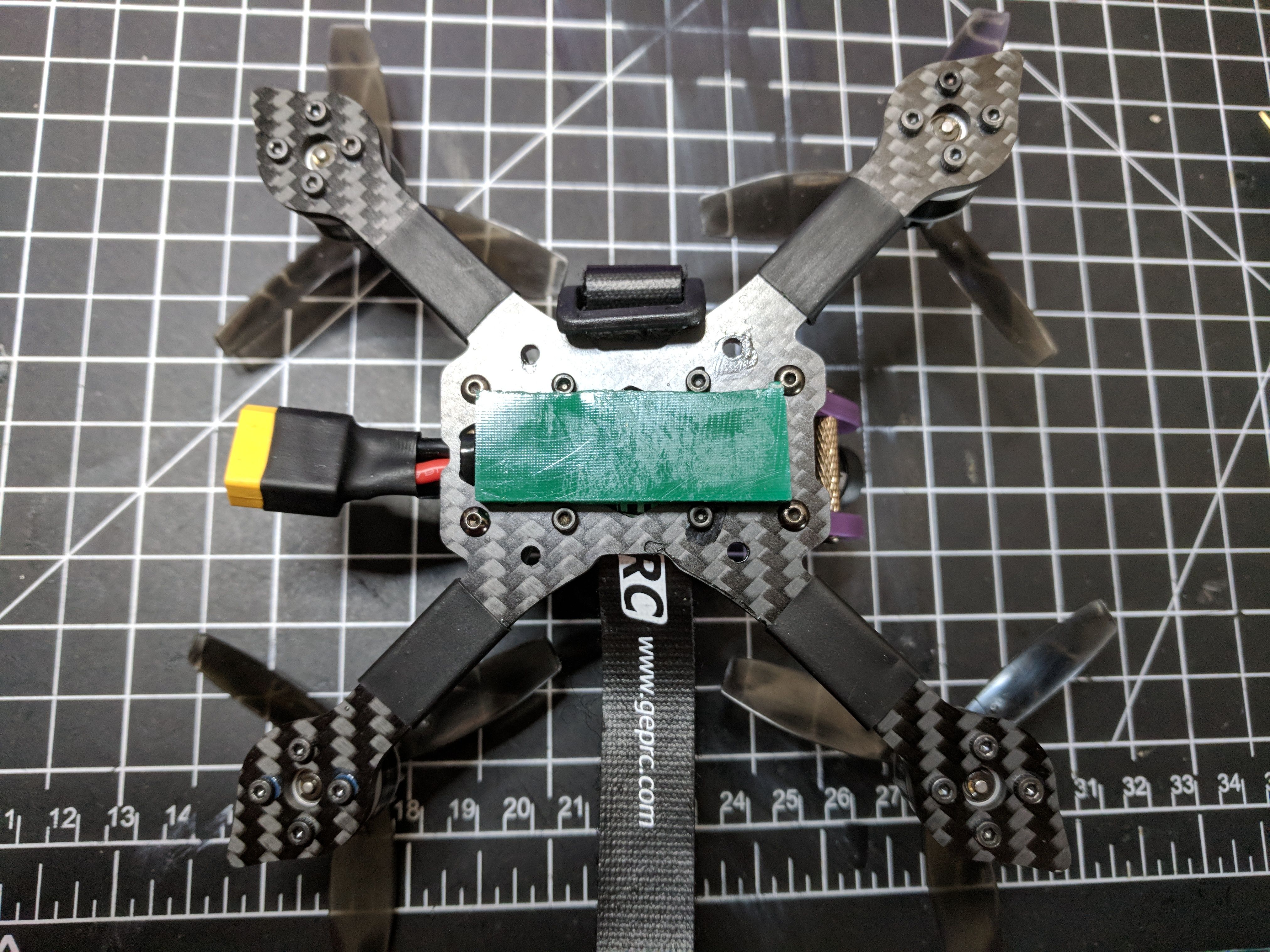
- Used an XT60 because the 4S batteries I bought came that way.
- Added a gel pad to the bottom to grip the battery. It's a little heavy, maybe I'll prune it or replace with something lighter, but I really like these pads.
- Blue loctite on all motor screws, frame screws, camera screws.
- Updated ESCs to BLHELI_S 16.67 to get dshot commands.
- Using Betaflight 3.2.1
- Remapped motor resources in betaflight to account for the way I oriented the ESC and FC. USB cable plugs in through the front without any issues.
- Did not need to reverse any motors in BLHeli, but I am running reversed props.
Betaflight diff:
# diff
# version
# Betaflight / OMNIBUSF4 (OBF4) 3.2.1 Oct 15 2017 / 19:42:16 (434db9a36) MSP API: 1.36
# name
name wr0ngway
# resources
resource MOTOR 1 B01
resource MOTOR 2 A02
resource MOTOR 3 B00
resource MOTOR 4 A03
# mixer
# servo
# servo mix
# feature
feature AIRMODE
feature ANTI_GRAVITY
feature DYNAMIC_FILTER
# beeper
# map
# serial
serial 0 64 115200 57600 0 115200
# led
# color
# mode_color
# aux
aux 0 0 0 1300 2100
aux 1 1 1 900 1200
aux 2 2 1 1275 1700
aux 3 13 3 1600 2100
aux 4 35 2 1600 2100
# adjrange
# rxrange
# vtx
# rxfail
# master
set baro_hardware = NONE
set min_check = 1010
set max_check = 1990
set serialrx_provider = IBUS
set motor_pwm_protocol = DSHOT600
set align_board_yaw = 90
set beeper_dshot_beacon_tone = 3
set yaw_motors_reversed = ON
set small_angle = 180
set deadband = 5
set pid_process_denom = 1
set osd_tim2 = 1281
set osd_vbat_pos = 352
set osd_rssi_pos = 40
set osd_tim_1_pos = 54
set osd_tim_2_pos = 2455
set osd_flymode_pos = 120
set osd_throttle_pos = 225
set osd_vtx_channel_pos = 377
set osd_crosshairs = 200
set osd_ah_sbar = 200
set osd_ah_pos = 200
set osd_current_pos = 0
set osd_mah_drawn_pos = 321
set osd_craft_name_pos = 2058
set osd_gps_speed_pos = 218
set osd_gps_lon_pos = 82
set osd_gps_lat_pos = 65
set osd_gps_sats_pos = 51
set osd_home_dir_pos = 302
set osd_home_dist_pos = 303
set osd_compass_bar_pos = 266
set osd_altitude_pos = 22
set osd_pid_roll_pos = 423
set osd_pid_pitch_pos = 455
set osd_pid_yaw_pos = 487
set osd_debug_pos = 1
set osd_power_pos = 321
set osd_pidrate_profile_pos = 345
set osd_warnings_pos = 2440
set osd_avg_cell_voltage_pos = 2432
set osd_pit_ang_pos = 257
set osd_rol_ang_pos = 289
set osd_battery_usage_pos = 359
set osd_disarmed_pos = 362
set osd_nheading_pos = 311
set osd_nvario_pos = 279
set osd_esc_tmp_pos = 121
set osd_esc_rpm_pos = 150
set osd_stat_max_spd = OFF
set osd_stat_min_rssi = OFF
set osd_stat_max_alt = ON
set osd_stat_bbox = OFF
set osd_stat_endbatt = ON
set vcd_video_system = 2
# profile
profile 0
# rateprofile
rateprofile 0
Did the maiden flight with RotorX 3040:
Small yard, so didn't dare to punch it, just making sure it mostly worked. Felt a little heavy. Maybe a bigger pitch prop would help with that. Will upload a video when I next fly at a bigger space. No audio for you guys, but man do I like the way the BH 1407s sound!
Did a second maiden at a larger field, verified failsafes, that the Rx was in range for the entire area, did some punchouts and cruising:
Edit 10/22/17:
Designed and printed a holder for the AXII antenna, available at https://www.thingiverse.com/thing:2600736 It seems to stay in the slots on the sparrow frame even though it flexes. For extra insurance you may want to use a ziptie to hold the cable to the frame as shown in the pics
Flew my Sparrow in a race, and got my first 1st in an elimination round!
Edit 11/10/17:
Designed and 3d printed some clips to secure/protect the motor wires:
https://www.thingiverse.com/thing:2637532
Edit 04/24/18:
Designed and 3d printed new combined axii and rx antenna holder:
https://www.thingiverse.com/thing:2877691/edit
Photos








Part List
Show stores (5)
How do you like the Black Label batteries? I saw there making and even smaller 4s now with the same specs.

Awesome build, that 3" has some great power! I'm working my first build and it's very similar to this one, but I'm trying to squeeze a runcam split 2 into the build. Do you think the runcam split would take away take away too much potential power? I am mainly confused about which FC to use since I do not know much about them yet and i'm not sure if I could fit a stack FC in with the runcam split. Could you take a look at my current build and give me any recommendations/brutally honest criticism? Thanks! https://rotorbuilds.com/build/8154
I've decided to opt out of the RunCam Split since I could instead just put a RunCam 2 HD on top to film and still be under 300g. Thinking about going with the RunCam Sparrow Micro, but I have the HD3s so I should probably pick an FPV camera that runs 4:3. Maybe the RunCam Micro Swift? Still looking for an FC I like, but at the moment I've decided to go with the one on your build since I have room for a stack now. Did you try running the build with the 5.8 antenna the stack came with, or would you recommend finding a different one to solder on? Thanks for the reply!
hi, do you experience hot motors for this build? what is your esc settings and protocol? thanks for sharing

Yup, completely stock for ESC settings and PIDs - my betaflight diff above is as-is from my flying quad. I didn't soft mount anything for this build either, though I may add something in the future. Can't imagine the cap would help with overheating motors, and shouldn't be that much warmer flying in that weather. As long as they aren't too hot for a sustained touch, and the quad flies appropriately, I wouldn't worry about it. Note, I don't fly that hard, so that may be why my motors aren't hot (see the videos above for my flying speed) My motors were still only warm when I switched to gemfan 3052 triblades, so your prop pitch should be ok, I don't think those dys are heavy in weight either - but if I'm wrong, maybe try something lighter
Guides & Reviews

AirbladeUAV has done it again and this time they've brought long range to the 5" class! Based on the popular Transformer Mini, the new Transformer 5" Ultralight adopts a lot of the same design philosophies with larger props and more payload capacity. It can fly upwards of 20 minutes on a 4 cell Li-Ion battery pack and in ideal conditions it's got a range of over 4 to 5 miles. In this guide I'll walk..
Read more
With the release of the DJI FPV Drone cinematic FPV has become a lot more accessible, but you certainly don't want to crash a $750 drone! The QAV-CINE Freybott is a compact, lightweight cinematic FPV drone that can take a hit and keep going. It's a lot safer to fly indoors and around people. With a naked GoPro or the SMO 4k you can capture some great stabilized footage. In this guide I'll show you..
Read more







Just got mine built and it's running great! How did you get the battery voltage on the OSD? Mine seems to be stuck saying 5.3V and I can't seem to get the low voltage warning to show up.
The stack I use gives direct battery to the FC, so I just made sure the option in the BF OSD was turned on - see my betaflight CLI diff to see which option it was