
I wanted to build a freestyle photography rig with full GPS capabilities, and add on a long range crossfire upgrade later. The Matek F722-STD has a barometer on board and ic2. I added a M8N GPS with a compass and flashed INAV. It flies great, INAV has air/acro modes just like Betaflight. It doesn't support d-shot yet and that's about the only drawback I see. Adding navigation to the OSD is great, latitude and longitude, direction home, distance from home, atitude, and ground speed. I run a DVR in case of crash I have exact coordinates. GPS lock mode for filming and return to home in case of panic or signal loss. A few grams of hardware brings so much to this build. Silicone conformal coating and corrosion x for the lovely Michigan weather.
Photos




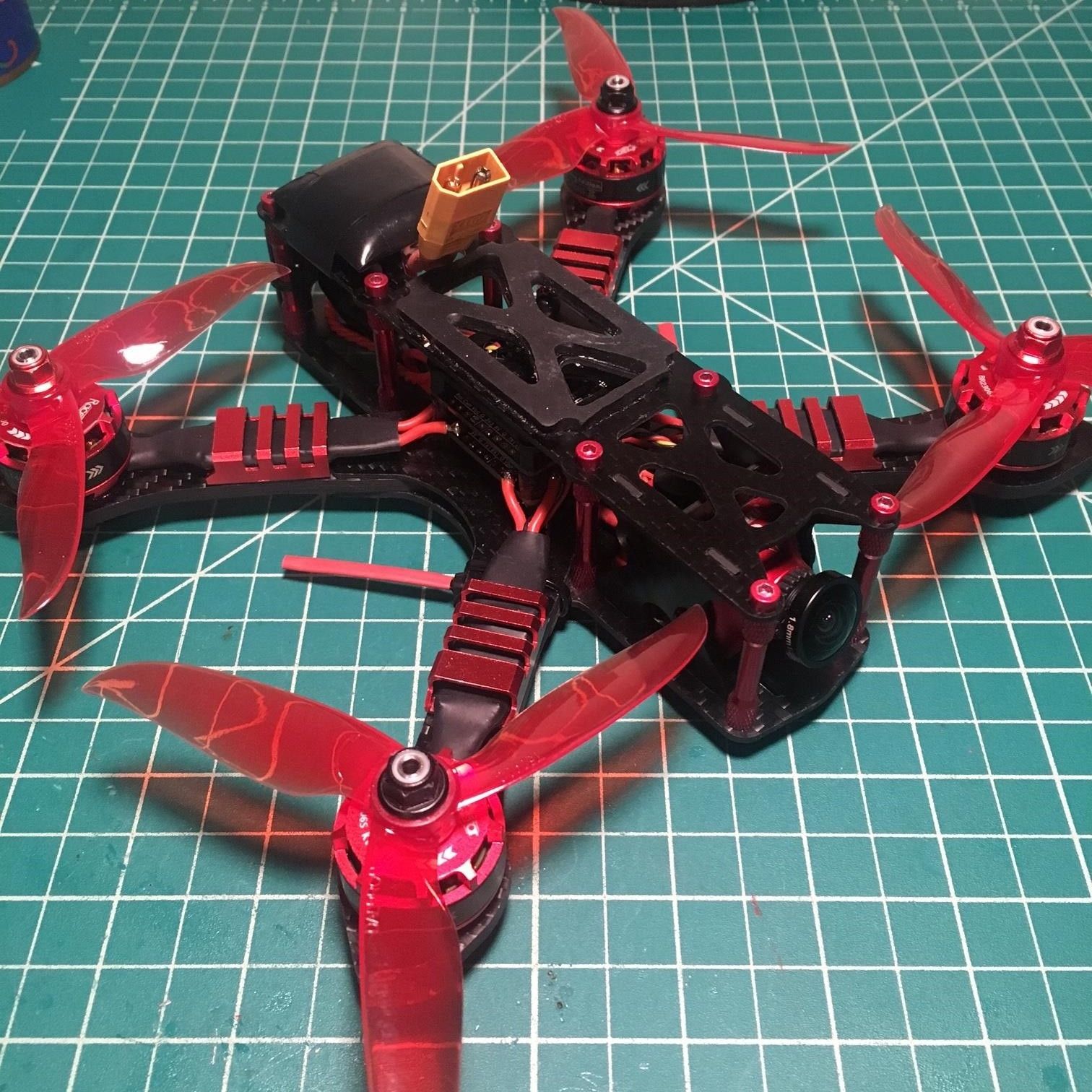



Part List
Show stores (7)
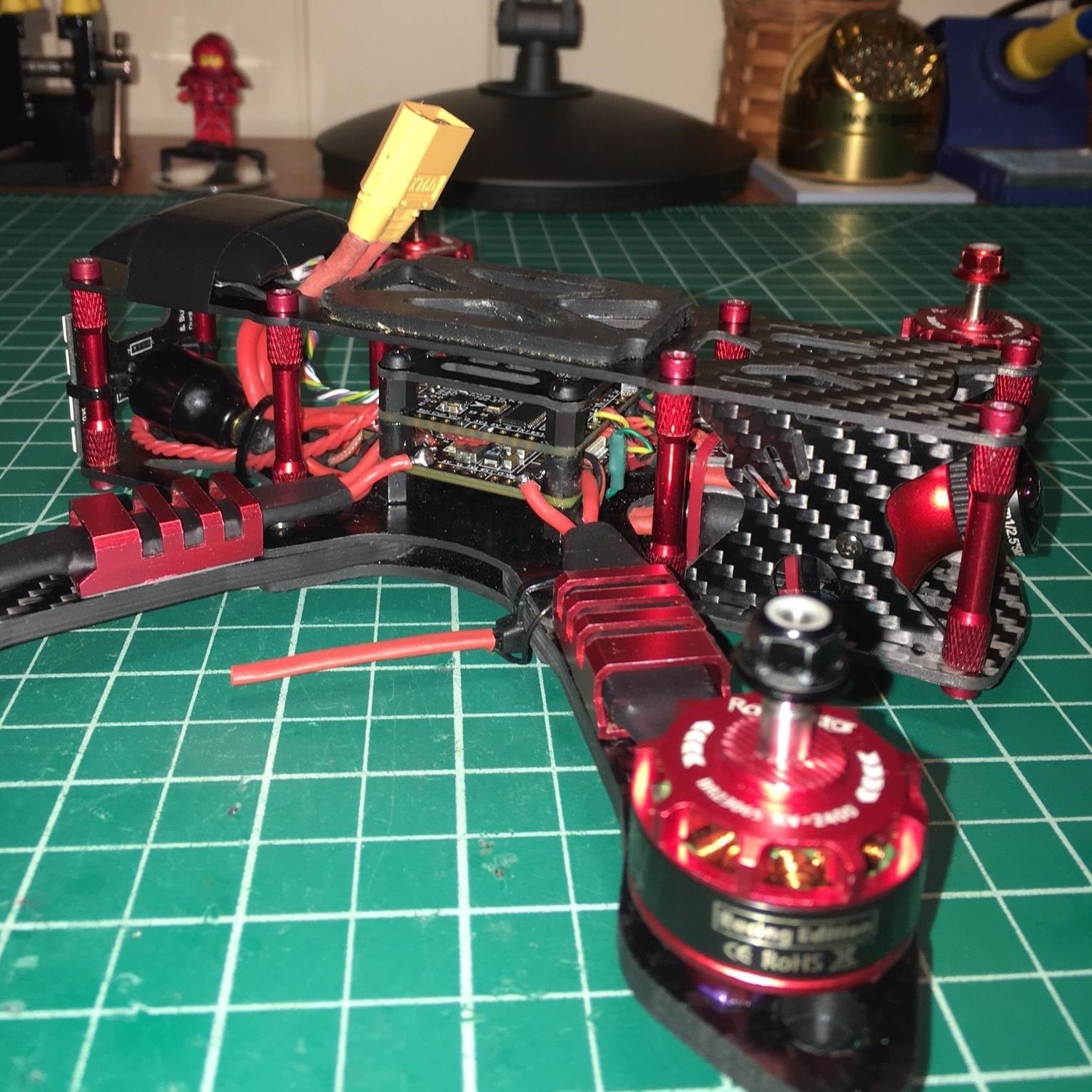
Do you have a link for that thick foam thing for the battery i see on the top :) nice build btw

it's made for the alien but it is cut pretty close. https://store.rotorriot.com/alien-5-lipo-pad-replacement-black/

How do rate the F7 FC so far?
Have you run it on 32k/32k? If not then what loops are you running?
Does the FC run off lipo/vbat or 5v?
Also have you had any issues with the FC at all?
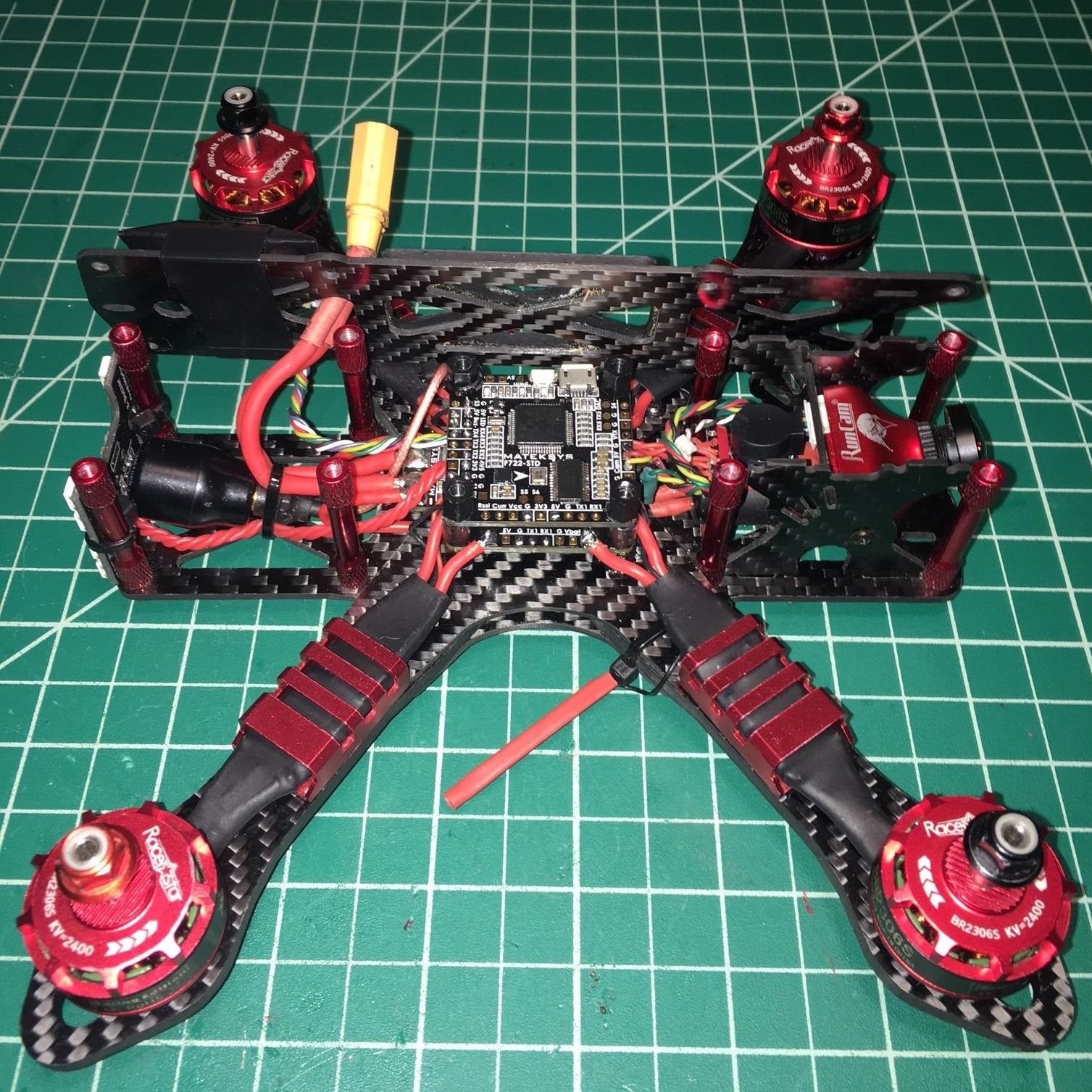
Betaflight devs have been working on optimizing code for f7 processers, it's not there yet. I run 16/8 with the gps, barometer, and accelerometer. That setup uses 47% of the processor. Flight controller is powered by 5v from the pdb. A ribbon cable carries everything to the flight controller. It's a great setup, completely protected and no worries about vibration, dampners are in place between fc and pdb. It even carries a uart for changing video channels. I rate the hardware a 10 of 10. The code optimization covers all f7 processers, none of them can run 32/32 yet. I'm sure in time the code will get better, there must be something fussy about the f7's. I don't regret the purchase and i would recommend it so long as you can wait a bit to run 32/32. I'm curious to see if the butterflight guys will optimize the code, they are all about high
pid loops. I have had no issues other than waiting on firmware.
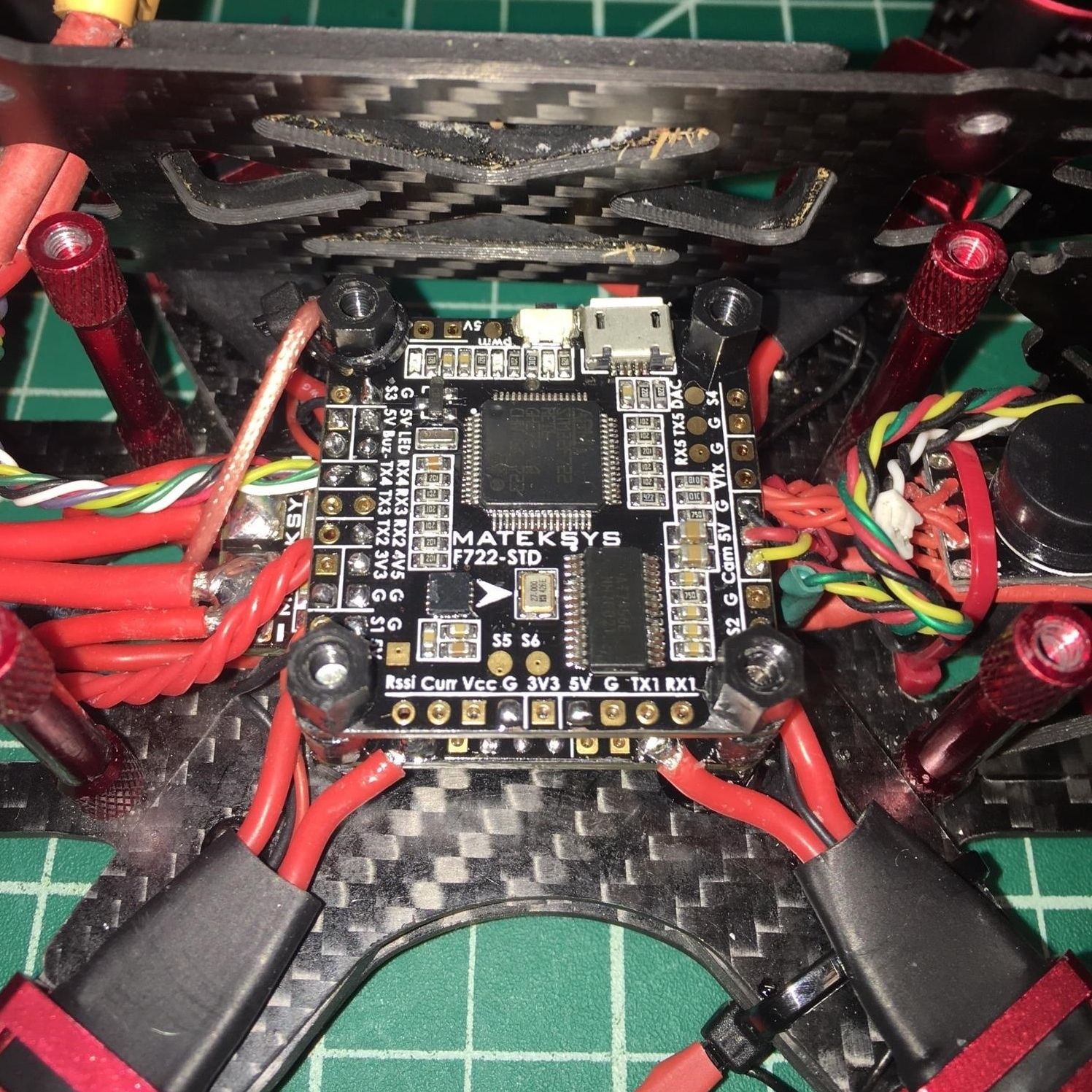
I'm curious as to your implementation of the GPS/Compass. I myself am running into something of a conflict between the barometer and the compass, and most resolutions end in adding 1k resistors to the SCL & SDA leads out of the compass. Did you have to do this as well?
I have it wired directly to the Ic2, betaflight and inav recognize it fine. It's led lights up blue so I think it's fine. I'm having a problem with the compass fighting the accelerometer, it drifts back to it's original orientation. I'm totally self taught from YouTube so I haven't had any help with this. I'm sure I just need to find the correct orientation, I tried all directions in the cli with no luck. I've just read that I probably need to flip it in the cli as well. I've been strapped for time lately, but I will have some time soon. I'm going to reload inav and see how it goes. Hopefully I can get advanced modes working. The GPS is working fine, I have the home direction arrow, coordinates, and distance from home in the betaflight osd. I really like the confidence that gives me when I fly new areas. I will update after I load inav again.

Curious if you have any video issues with the antenna stub being within the frame and not hanging out. Do you notice a difference?

How tall is that stack? How short can it reasonably get? I'm building based on a 20mm standoff height (the hyperlite flowrider) and JB's vid of BF3.3 and 32k has got me looking for F7 with an ICM20602 gyro. Has the gyro given u any trouble? Sry for all the questions but this seems to be the only (and yet perfect) stack for my upcoming build. Thxs in advance








Nice setup, I too looking for freestyle (6" inch) cinematic rig, wanted to know your rig performance, any videos ?