
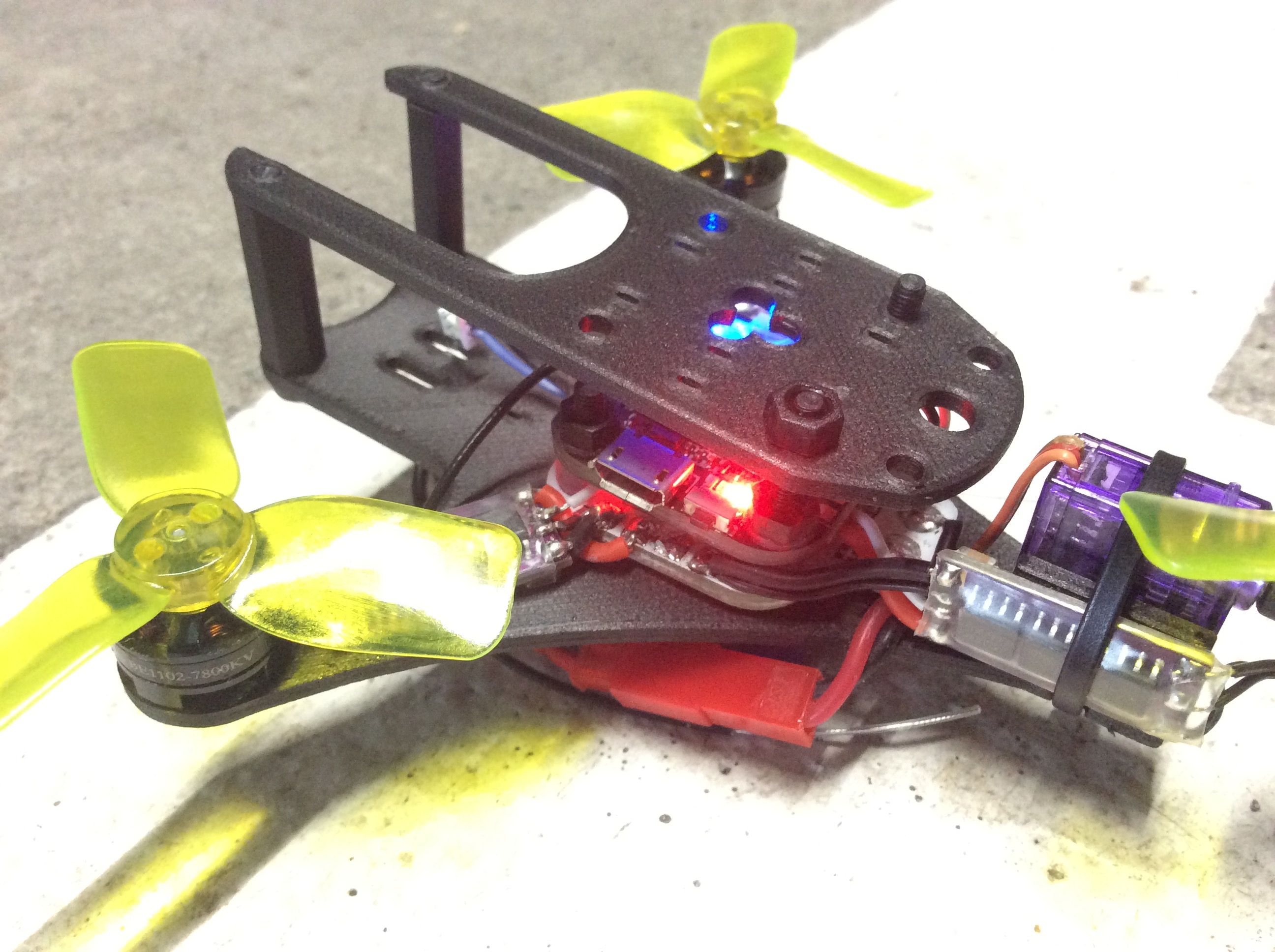
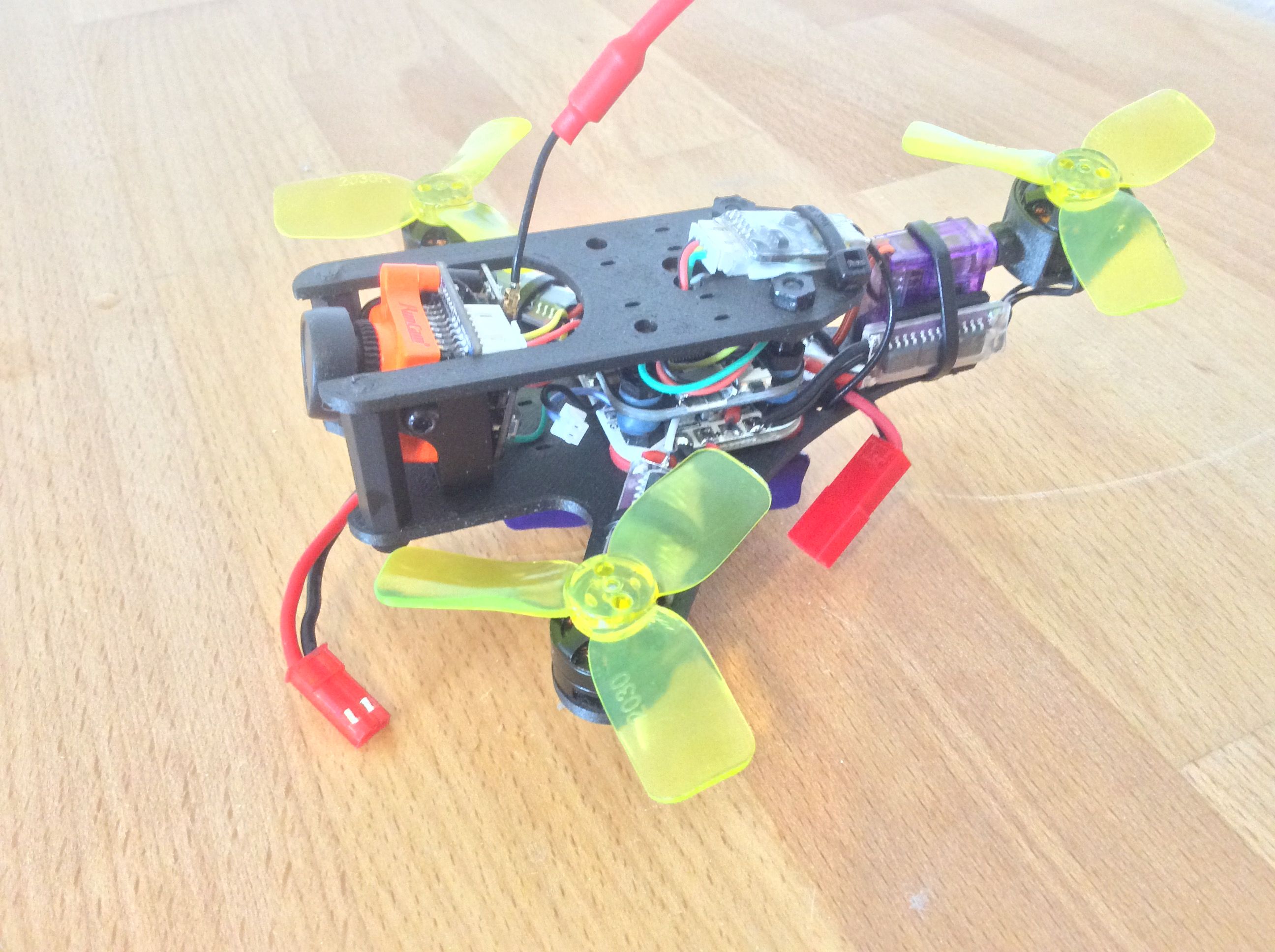
For when the weather outside is bad, I've always wanted a small Tricopter capable of indoor flight. Unfortunately something like this doesn't exist on the market so I've taken up the challenge of making my own. After performing all the needed measurements from the equipment currently on hand. I sat down and designed the Whirlygig exclusively using Fusion 360.
Photos

Part List
Frame |
Whirlygig Mini Tricopter by 1Smug_Bastard
Thingiverse.com
|
See Site |
Flight Controller |
Matek F405-MINI Flight Controller w/ F405, 32k Gyro, BFOSD, 32M Flash
(3 builds)
Getfpv.com
|
$31.99 |
ESCs |
3 x EMAX D-SHOT Bullet Series 6A 2S BLHELI_S ESC 2.1g Support Onshot42 Multishot
(4 builds)
Emaxmodel.com
|
$14.97 |
Motors |
3 x DYS BE1102 7800kv 3,5g Mini Brushless Multicopter Motor für FPV Racer
(2 builds)
Premium-modellbau.de
|
See Site |
Propellers |
3 x 2x3 DYS 3-Blatt M2 FPV Race Propeller Blau PC Luftschraube 2030 XT20303
Premium-modellbau.de
|
See Site |
FPV Camera |
RunCam Swift Micro V2 2.1 FPV Kamera OSD
(282 builds)
N-factory.de
|
See Site |
FPV Transmitter |
RunCam TX200U Video Transmitter with BFCMS Control
(19 builds)
Getfpv.com
|
$17.99 |
Receiver |
FrSky R-XSR Ultra SBUS/CPPM D16 16CH Mini Redundancy Receiver for RC Multirotor FPV Racing Drone
(937 builds)
Amazon.com
|
$24.00 |
Batteries |
Turnigy nano-tech 300mAh 2S 35~70C Lipo Pack
(28 builds)
Hobbyking.com
|
$4.99 |

omg how did you connect servo to the controller?? ive been wanting to do that too but i have no idea. Hope it flies well!!

Pretty easy really...
Pos / Neg connected to Vbat (2S Lipo) with the singnal wire connected to a motor pad on the Flight Controller. In my case this was S1 and then set to PWM @ 330Hz within the firmware. Motors 1-3 were connected to motor-pads S2 - S4 respectively and use dShot-600. Keep in mind that I’m using dRonin and not Betaflight. This way i can Auto-Tune the PID’s, thus having a better overall flight experiance for such a little copter.

Yessss my guy, micro tri ftw! 1) does it work reliably/smoothly? 2) plan on lightening it up a little? he seems to be a bit of a chunky lad :)
@IcarusIX
Without the Camera and Top, i was able to get the weight down to 60g. This allowed for 4 minutes of acro flight and yes its pretty smooth on dRonin. Was chasing my son around the house with it.
Beta flight on the otherhand, itsnt so great for Tricopters. ..
From a post I made earlier on Reddit (https://www.reddit.com/r/Multicopter/comments/bnobwu/discussion_semilong_range_tricopter_vs_semilr/en8yj8u/)
"Tricopters using Betaflight dont calibrate the Tilt-Mechanism nor does it account for the counter torque very well. (Hence the wag) This is why Davids Tri’s are all using a special build of dRonin called TriRonin. Not only does this calibrate the Tail, it Autotunes the PID’s and uses advanced algorithms to manage the tail torque. Furthermore, Tri’s dont fly well with very high PID’s values or any Yaw D-Term. In my experiance a moderate tune works best, while specifically focusing / boosting Pitch and Roll terms. Then set the Yaw P & I only as high as needed to achive the performance your looking for."
Beyond all that, I'm considering if it would be worth it to refine the build, going for lighter parts (Cam / VTX / No PDB) or to just scale up to a 3" Tri using the same hardware, just larger motors / props. Basic idea being is that this would increase lifting capacity and allow for 4S Lipo's to boot.








very nice, please add more pctures of the beauty. a dvr to see flightcaracteristic of a nanotricopter would be very nice
As per your request.
https://www.youtube.com/watch?v=HFm1F4YyL4E&t=3s
very nice, thanks alot. thingverse template- nice. you write “19thoot spline“, are the standart for the size, if my tiny servos from artech has 19tooth , should it work? thanks in advance for an answer if you now, thank you for sharing on thingverse- nice description
i will do a bi-copter build with some 1104, try something specialy with a 350mm wing combinated - dont now if i get a flyable result. i was rearching a reason to connect the motors with the servo, would be very nice if your adapter work for me aswell. And your tricopter look very lovely, i have to try aswell.
now over thingverse i found your yt, you build bicopters :-) awesome
do you now a build description or a tutorial you can recommend?
Here is the basic wiring for the Whirlygig V1...
Motor / Servo Wiring:
-Servo to FC pad S1
-Front left motor (North West) to FC pad S2
-Front right motor (North East) to FC pad S3
-Tail motor (South) to FC pad S4
Receiver Wiring
S.Port to FC TX4 pad (Uart 4) "non-inverted"
Sbus to FC Sbus pad
Beyond that this build assumes that you've strong knowledge of both electronics and soldering.
Bicopters are a mixed bag simply because they control flight by managing their Center of Gravity. (CG) Pitching the motors ahead induces the CG forward and thus provides forward flight. While this sounds cool, you have to keep in mind that the Bicopter is by its very nature an unstable craft. This is compounded by the fact that Servos are not especially fast at compensating for oscillations and at worst tend to overcompensate inducing further oscillations. Only way to tune a Bicopter is to undertune the Yaw and keeping the Yaw D-Term at ZERO. Pitch should always have the strongest PID values because of it's critical roll in managing the Bicopters CG. While Roll should be moderately tuned to help prevent oscillations.
To do what your wanting would require that the props have clearance from the wings and that the battery is mounted way under the frame to keep the CG down low . The wings may or maynot work well simply because the copters flight controller is always expecting to always provide lift using the motors. Thus wings add a dimension that the Copters mixer may not be able to compesate for. IMO it would be advisable to use a custom mixer or one that allows you to toggle between Copter and Fixed-Wing modes of flight. I know this will work as it's been done but to be honnest there's no clear advantage to doing so other then having VTOL. For a wing its not going to fly great and for a bicopter it can be a too unstable. In the end this will be more of a novelty craft and not exactly the best of both worlds.
thanks alot for your answer. i still try to understand everything. thank you for the shared honnest thougts about. thanks alot you take the time for this informative answer.
to explain my motivation, if you like to understand. it comes from this brushed rudderless quadroplane, very fastinating for me: https://rotorbuilds.com/builds/16433
and it comes from the “eachine e500“ (it would have the mixersettings i will need, i beleive) were my knowledge is in the end of understanding what advantages a rudder should have in comparison to a “motor conected to a servo„.
this is where my motivations come from and other part is i like to build... with the parts i have.
thank you very much for the pid infos, this will be a big help.
i start a mockup as a build log, if you like to see were i am in my process - but i have to update with the knowledge earn from you (when i understand your answer completly); https://rotorbuilds.com/builds/18067
sry
https://rotorbuilds.com/build/16433
and my buildprocesslog
https://rotorbuilds.com/build/18067