TRYBIT-H!
 By Pruning Peacock on Oct 14, 2020
By Pruning Peacock on Oct 14, 2020
Meet TRYBIT-H!
My comrades and I had some spare old parts laying around, and I decided to experiment with building a tricopter. I think the idea started when I realized I have 3 1806 motors, that are discontinued and that were very fragile. Since their ultimate faith was to sit somewhere, why not on a tricopter frame.
Betaflight worked very badly, to say it nicely, and the board I was running was not supported by Dronin. I found Triflight, which is based on old Betaflight and that seems to give me the best results.
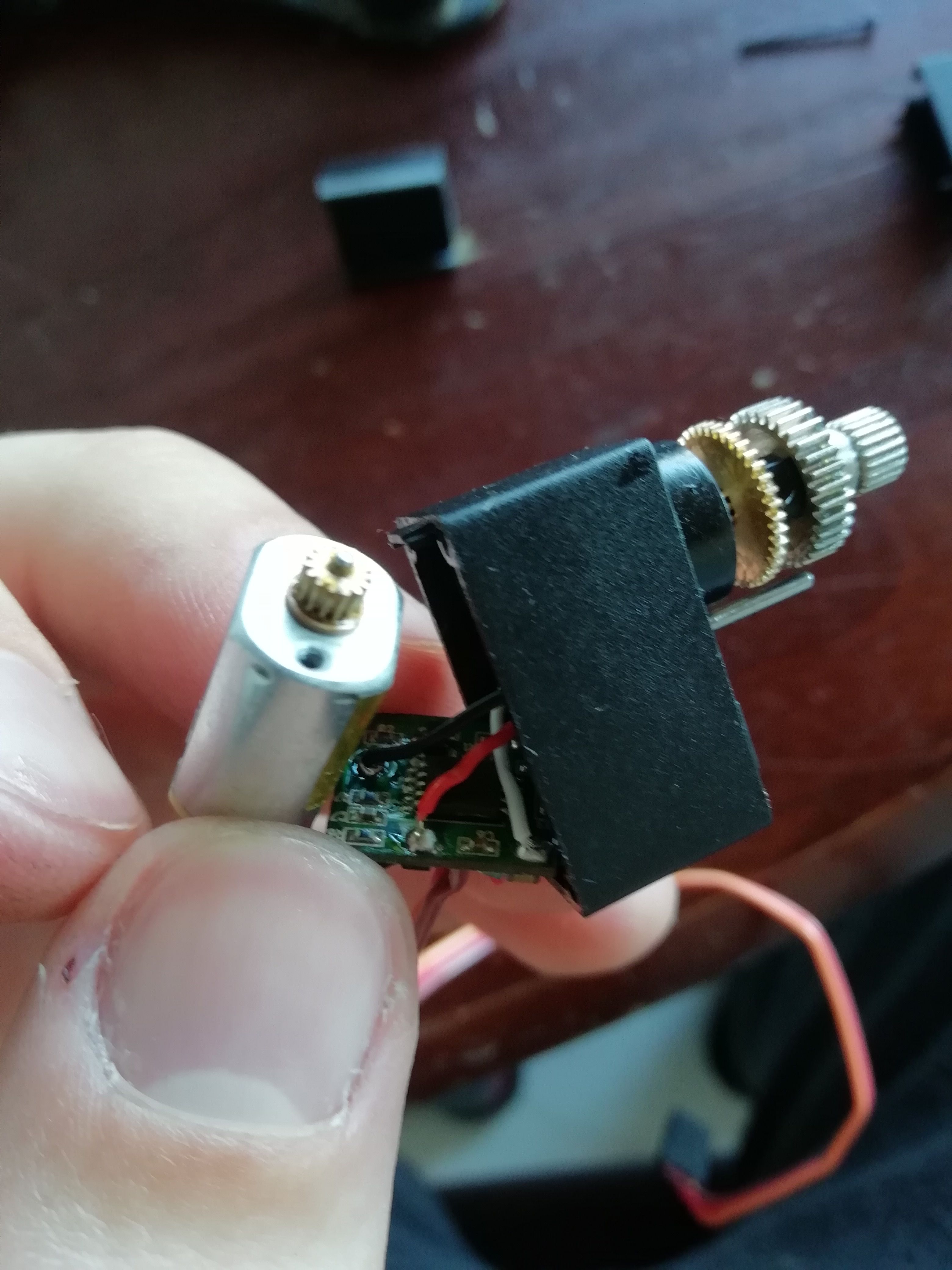
I bought a new digital, metal gear servo (kind of ironic brand name - Corona) for it, because the original one I had was analog (50hz refresh rate) and had lots of play in it. The new one is a whopping 300hz refresh rate! YES hz not khz :D
This was our process of making it, it was long and difficult and no matter what you do, the tricopter would fight back, hence the name TRYBIT-H!
Ultimately none of us could tune out the wobbles. Perhaps the motors are too weak and cannot keep up with the pid loop, perhaps the servo midpoint and endpoints are not set correctly. However more likely, this is just how the tricopter are, although I have seen much better footage on Youtube. Perhaps mine has a gypsy curse on it :D
Also its running the old Ibus receiver with my old Turnigy Evolution remote and I do not think its worth putting a 30 euro crossfire receiver in it, which is what I am running now on my builds paired with Tango 2. If I want to fly it I have to bring a seperate remote with me, you see its still fighting every step of the way :D
Now it spends most of its time sitting inside, being flown occasionally, but with no better results, atleast it looks cool and unique!
Looking forward to hearing your comments and suggestions!
Photos


Part List
Show stores (6)
Hey guys, just saw your video and I loved it, Its great how you did this as a team effort! Myself I've built a dozen or so Tricopters starting with the RC-Explorer Tri-Baby back a few years ago. Here is that build but keep in mind that I have updated this considerably: https://rcexplorer.se/forums/topic/tri-mini-build-matek-f405-aio/
From this year, here's one of my better 2S micro builds with video: https://rotorbuilds.com/build/20766
Now a while back I did a write up on RCGroups on how to setup and tune a Tri that you might find helpful. https://www.rcgroups.com/forums/showthread.php?3569727-Yaw-tuning-%28How-To%29
Along with that, I'll suggest the following:
-Ditch Triflight for the latest Betaflight & motor RPM-filtering. Not only does this counter the majority of the prop-wash but it makes the tail so much easier to manage.
-The Servo is 100% driven by the level of P-Term, while I-Term is used to hold your orientation. D-Term adds excess delay to the system thats already 100 times slower than the worst ESC on the market. The Servo's we use are normally 300 - 330 hz so adding D-Term before the tail P-Term and I-Term is well tuned will make the Servo next to impossible to tune it. Even then, D-Term isn't likely to help much.
-Your strongest P-Term will always be Pitch, followed by Roll and then lastly Yaw. Reason for this is that your Pitch not only sets the crafts orientation but direction of flight. The Roll being in many respects overpowered as the motors are hyper responsive, wont need such a high value so long as the response is crisp and without overshoot. Yaw, starting from a low value, your P-Term will slowly increase till you feel that the response causes the copter to "snap" to the orientation without overshooting or oscillation.
Other notes from RCexplorers forums: https://rcexplorer.se/forums/topic/f1-tricopter-mini/#post-65265

Hey Np, i totally get how hard it is to find solid info in Europe. Living near Heidelberg, I've found no one who flies. With maybe to odd 1-2 people that are pretty F'n unsociable.
Now as for your question: Yeah, BL-Heli and the S ESC's work with most all ESC's but you may need to pay for the firmware depending on which type of the ESC you have. Obviously this all works best if your using really good ESC's rather than olders ones from a few years back. Feel free to hit me up if you have specific questions but be prepaired to provide stuff like your Betaflight DIFF and flight logs.
Side note: I still have that 4-6S baby tricopter and can provide the Diff if you'd like to examine it? Keep in mind that I am using 1800KV motors and a high voltage servo. Thus my PIDS wont work for you as yours will need to be pushed lower on a higher KV motor such as a 2300.
Guides & Reviews

AirbladeUAV has done it again and this time they've brought long range to the 5" class! Based on the popular Transformer Mini, the new Transformer 5" Ultralight adopts a lot of the same design philosophies with larger props and more payload capacity. It can fly upwards of 20 minutes on a 4 cell Li-Ion battery pack and in ideal conditions it's got a range of over 4 to 5 miles. In this guide I'll walk..
Read more
With the release of the DJI FPV Drone cinematic FPV has become a lot more accessible, but you certainly don't want to crash a $750 drone! The QAV-CINE Freybott is a compact, lightweight cinematic FPV drone that can take a hit and keep going. It's a lot safer to fly indoors and around people. With a naked GoPro or the SMO 4k you can capture some great stabilized footage. In this guide I'll show you..
Read more







I have a cheat code for solving tricopter wobbles and tuning issues: simply invert the tail, so the motor's inertia helps yaw instead of actively hindering it.
https://www.flitetest.com/articles/inverted-tail-tricopter