
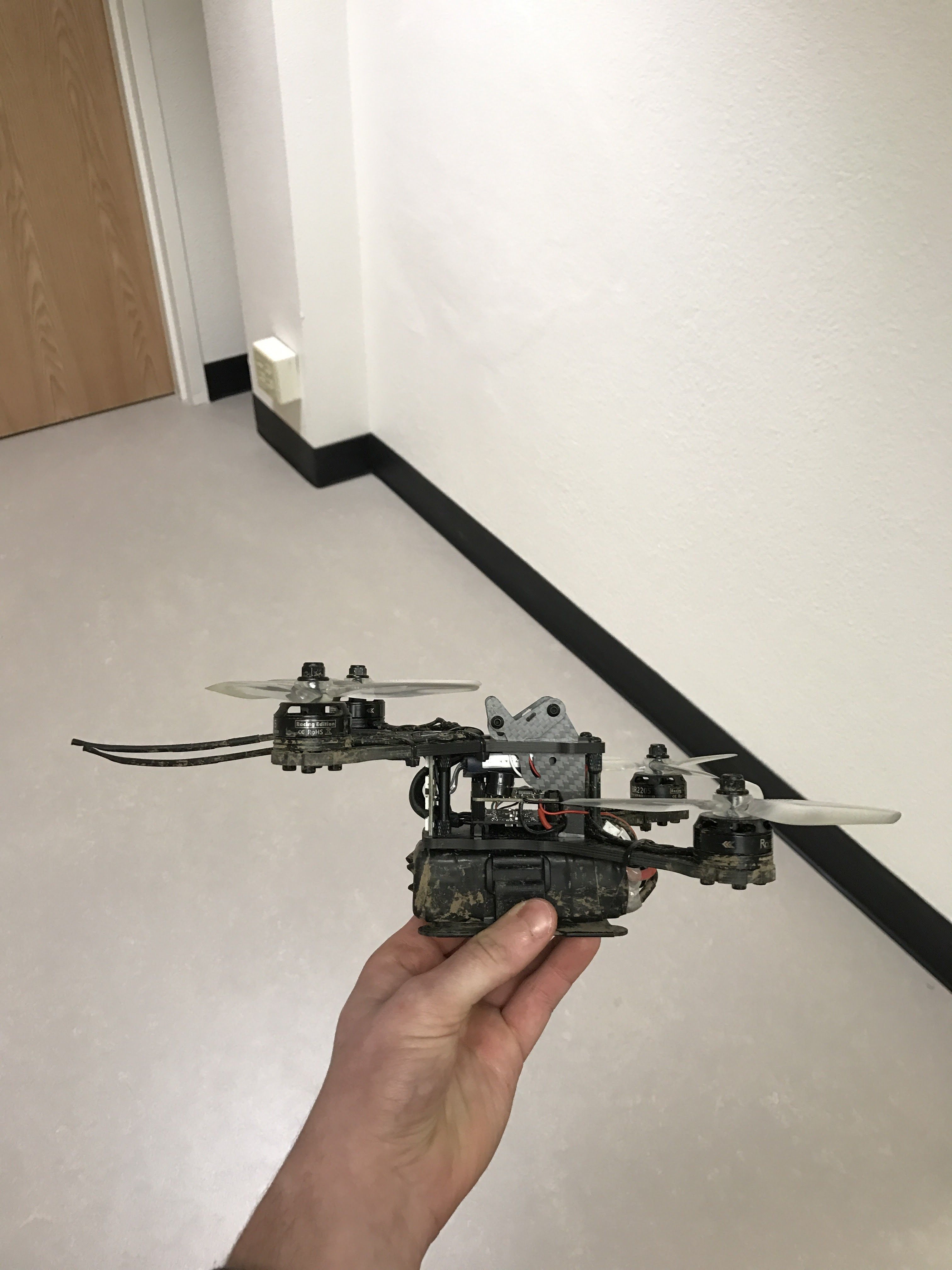
Decided to go with the odd-ball frame!
Photos




Part List
Show stores (3)
No FPV gear?
Show 8 more comments


How does it fly?

It flies so smooth! I've flown a Dshot150 F3, stretched-X frame with 2300kV 2205's and this thing is like butter in comparison.
I really think the elevated rear props helps with prop wash in different movements.
The center of gravity is still right at the center, about at the height of the second stacked PCB.
Thanks for commenting!








Have you thought about mounting those rear motors upside down?? To make it more odd-ball??
My buddy and I were talking about it... It could be cool! Wouldn't be hard to swap them and adjust Betaflight config. I'll keep you updated if we do ;)
Thanks for commenting!
My 2 cents:
If you only care about looks, it's fine. But it defeats the purpose of placing them on different levels. The intent is for the rear props to get "clean" air instead of fighting turbulent winds from the front motors. This is especially evident when doing sharp corners. Clean air for all motors = better/smoother/faster flight.
Actually its been proven that there is actually a small thrust increase when using inverted motors...therefore leading to more efficiency
Was that really proven? I thought it was just a theory. And there are a few factors to the theory of that "small thrust increase" which causes me to doubt that it applies to this frame.
A quote by John Arne Birkeland on the diydrones forums:
"The effect is very similar to how a brushless camera gimbal works. The gimbal motors are fast but have have very little torque, so even if the CG is just slightly off they are unable to stabilize out all movements.
The same goes for multicopters. When they are balanced it takes less energy to start and stop a rotation. Meaning it also takes less energy (and is quicker) to maintain a still state."
The "still state" He's referring to justmeans stability. This frame requires that the battery be underslung, which means the CoG and thrust-line will be (more) in-line when the front and rear motors are on different levels. That equates to better stability and performance. When you combine that with the fact that this setup also eliminates propwash from the front motors, I can only conclude that (on this frame) there is much to lose and nothing to gain by going inverted.