Pix-Y Sixty
 By fradioflyer on Jul 22, 2015
By fradioflyer on Jul 22, 2015
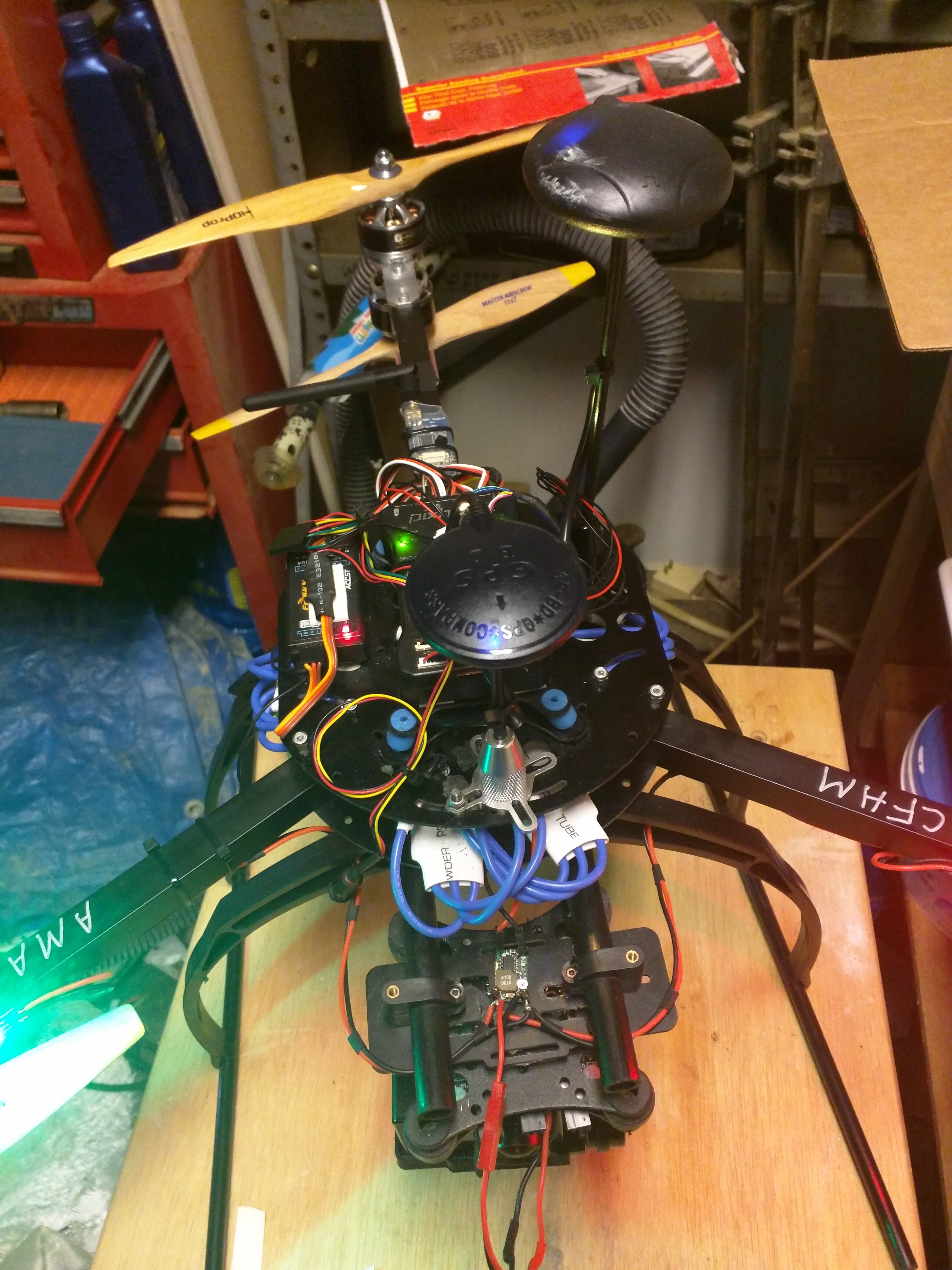
This build started with a 580mm Y6 hexacopter frame. I replaced the arms and intentionally cut them a little longer than the original ones, so what I have now is 600mm or 60cm, so I call this one the 'Pixy Sixty'. This is my first build using the Pixhawk flight controller. It's been amazing seeing the exclusive features being added to this controller that isn't available with the older APM. This is the rig I use for aerial photography and occasionally videos, too.
This is my second multirotor build, and the first one from scratch. I already have a 330-sized quadcopter; I wanted something different. The tri-copter style appealed to me but I didn't want to deal with a tail servo so I found the Y6 frame type. I read a lot about the pros and cons of a coaxial setup before starting the build, but now with a few months of experience, I know this:
- the Y6 frame shape is far easier to determine orientation at far distances; the 600mm size is easier to see at high altitude.
- the Y6's front arms are wide enough to avoid getting a lot of prop in the camera's field of view (though occasionally, the lower prop sneaks in during a yaw). The 170 degree camera lens also contributes to this, I'll bet.
- it does seem to be more stable in high winds
- finding the optimal prop combination is a trial n' error labor of love (and money)
- many debate the accuracy of eCalc, but I find this setup closely meets my observations.
I'm quite interested in exercising all sorts of redundancy to ensure $800 that goes up in the air, comes down in a safe and orderly manner. I suppose if I ever lost a motor or a prop, the hex configuration will still allow me to get "home". I hope to never test that feature. I have FrSky telemetry to my Taranis radio and I have the 915MHz radio for Mission Planner/Tower app connection. I usually go with the telemetry on the transmitter alone unless I'm running a mission. The Pixhawk combo came with the NEO-6M GPS and since then I picked up the M8N to run a dual-GPS setup (the M8N has been really remarkable; best fix = 20 satellites, 0.59 hdop).
Will all the redundancy matter? I don't know... I've watched one drone fly away on Tower (until it got out of range and disconnected). In March 2016, the Pixhawk was using a redundant power source (from the ESCs) when a Power Module wire was broken; I don't know how many flights I had before discovering the broken wire and fixing it.
Photos



Part List
Show stores (9)
Could these really function the same? Specs are comparable...3A output for a variable voltage range exceeding my needs. One weighs 10g, admittedly with a plug dongle still attached. The other won't register on my scale...hiding in the shadows.
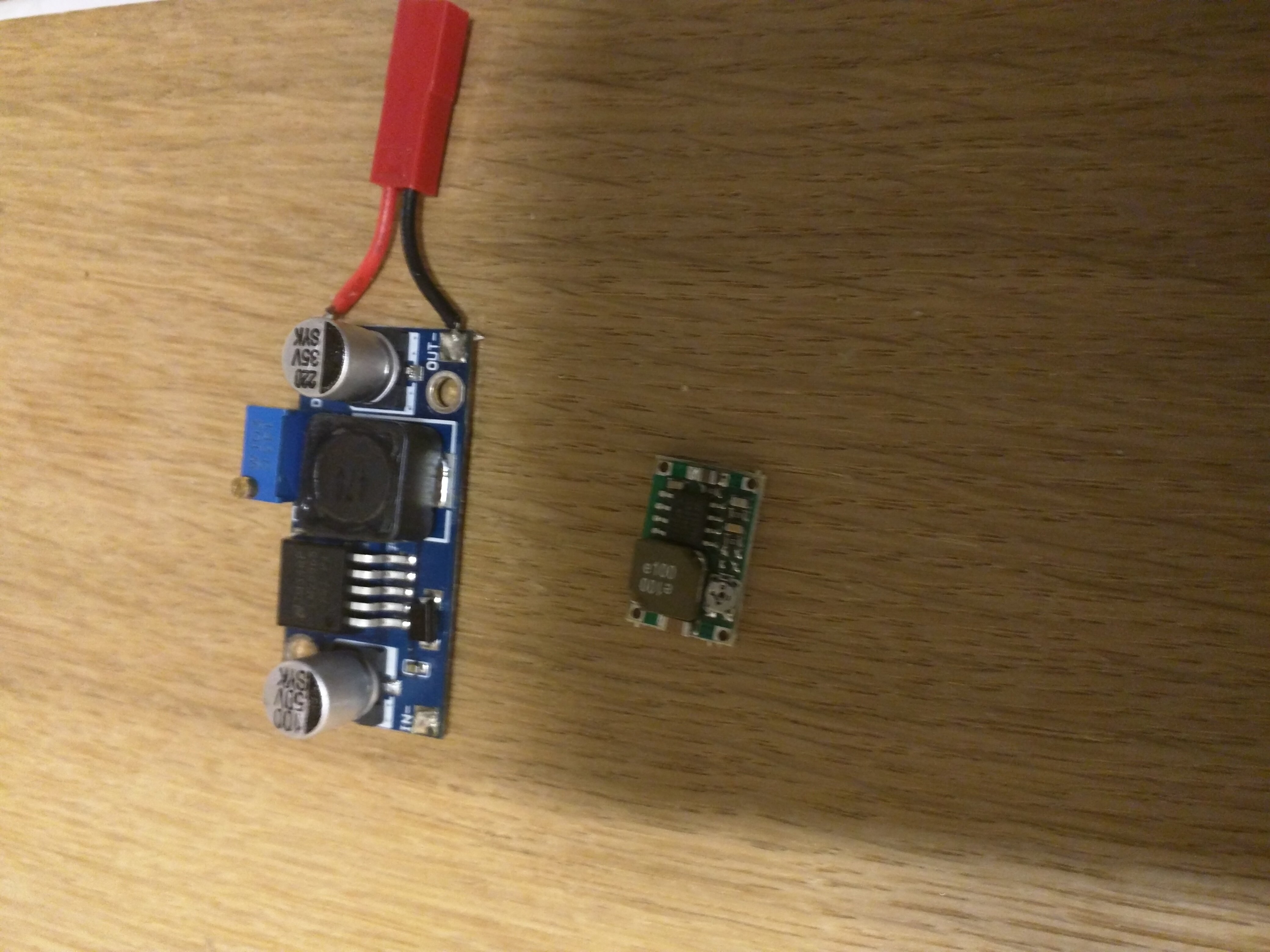
Well, that experiment was short-lived... while the smaller sized regulator performed well, I just started having too many accessories glommed onto it's output pins. I probably should have done this to begin with, since this is a 4S system, but now I will connect a 12v BEC from the main power board to a mini-PDB from which I can then more easily connect gimbal, LEDs, vTx, FPV camera, ...
Public service announcement: don't discount the importance of a pre-flight inspection.
I wanted to get a flight out this morning before the winds picked up. I was in the process of strapping the battery in when I noticed a broken wire. Quickly traced it in one direction ending at the Power plug on the Pixhawk... uh oh. At the Power Module, it had broken from the connector in the plug.
Well, I thought, I can fix that one cable real quick, lemme just pull the connector out from the Power Module and get to work. Without the least bit of effort pulling on the connector itself, what started as one broken wire became 2, 3, then 4... All of them broke off inside the plug before I could get the connector unseated...ugh!
I felt lucky to find another 6-pin connector like that one, and enough wires with the crimped ends that I could solder onto. I don't want to image what might have happened if I'd not noticed that stray broken wire and the others broke at some point in mid-flight!
So, wooden props have caught my eye recently, though there's relatively little to read or watch about it. What say you?
The long-in-the-tooth SJ4000 has been spending too much time connected to my PC as a webcam. So, what to do? Join the gang with a Yi, of course!
Now, while I'm still waiting to complete the motor upgrade, I can play with gimbal pids all over again... {sigh} ...well, maybe not such a big deal after all. There were quite a few adjustments needed to get it balanced while powered off, but the current PIDs seem to be OK as-is.

I got rid of the yaw waggle. Changing deadband and hysteresis values didn't help. Turns out the motor wires were under too much tension... probably from a few of the times it spun like a poltergeist with the SJ4000!. There's still the slight jello, like you see in that video...mostly when I'm face on to the wind, so I think I'll try to stiffen up the pitch response and see what happens.
I finally decided to mount up the 2nd GPS unit permanently. We'll be ready for Copter 3.4, which I understand will truly support dual GPS.
I found a fairly recent discussion thread where another user had the same experience (a rapid change of position) as I. The tone of the conversation seemed as if the devs were surprised by that behavior and then they launched into a debate of how best to manage the transition (I could probably re-read what they were talking about a dozen times and never understand it).
In the meantime, I figure there are a couple things I can do to limit my exposure to it. One, leave it on the ground longer to allow for the switch before arming. Two, not use any GPS-dependent modes until safely above all obstacles. Three, unplug one of the GPS'es if options one or two isn't possible.
Oh, coaxial configuration...how we love to tinker for efficiency! I wrote this, above, quite some time ago (and it's becoming true all over again):
"finding the optimal prop combination is a trial n' error labor of love (and money)"
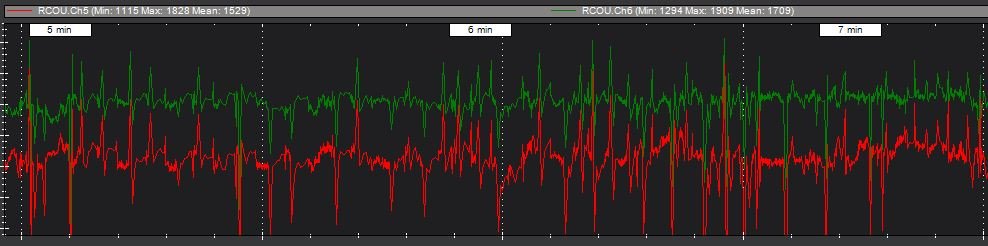
With the former RCTimer motors, I found that optimal combination with 12x4 uppers and 11x6 lowers; in a hovering flight, the RCOUT practically matches for upper and lower.
Now, I introduce the new T-Motors and that RCOUT has changed. The lower motors are working harder than the uppers. I saw this same pattern before, when I tried a 12x4 and 11x5 combination. I fixed that with more pitch on the lowers, buying the 11x6's. I'm going to try that fix again by ordering 11x7 propellers.

Maybe so... I figure I was collecting so much gear I was going to have to take along a second person to carry it all out to the field. Before it all has to be lugged back, they might as well pull up a chair and watch! :-D
Antenna tracker seems like a cool thing to put together, but the crazy long range it allows for is probably only achievable with a plane.
Just recording a curious observation with AutoTune yesterday -
I'm running the latest 3.3.3 firmware... opted to run my first AutoTune since probably 3.2.1 and since I upgraded motors.
I launched to a reasonable height, 8-10m, set AltHold, switched on AutoTune. It started with the roll axis, as expected... twitched and tested for 2-3 minutes, as expected. Then it... paused(?) almost 3.5 minutes (confirmed in the log) just floating, no stick input from me, until starting the pitch axis twitching. I'd never experienced that before.
Motor (and ESC) upgrade complete!... got an excellent($35 each) deal on T-Motor 3110-700kV off of eBay's 'Make an Offer' feature. I'm looking forward to better weather so I can see if eCalc was correct.


Hovered for about a minute and a half yesterday before packing it in. Too much wind and gusts to really feel comfortable or enjoy myself. I say 'hovered' but, really, once it was above tree top level, I just pushed it south and let the gusts blew her back to me. Still patiently waiting to really shake it out and test the extended flight times....
Yep, seems to be working pretty much to eCalc spec. I stepped outside yesterday afternoon and noticed it was practically windless so I grabbed a fresh battery and up she went. After a few laps around the property and an Autotune cycle, I landed at 80% consumed, 16:23. For 80%, eCalc predicted 17:24 strictly for hover so I think I could best that by some seconds if I ever wanted to just sit in a Loiter for that long (boooring!).
I found a very feature-rich Taranis script for telemetry display.
http://www.craftandtheoryllc.com/product/taranis-user-interface-for-ardupilot-apmcopter/
While I've had telemetry on the Taranis since practically Day 1, this script really presents the data well AND transmits the status messages, which I could only get before via a separate connection with the Tower app.
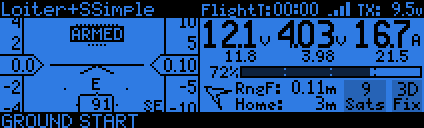
I use Tower for plotting Auto missions only, now. Everything else it does I get on the Taranis display with the added benefit that I can program feedback features into the controller. E.g. alerts for when battery remaining is <50% and Dist from Home > 200m... Or when current > 70amps sound a warning... Or when in stabilize mode and vertical speed is < -3m/s (falling too fast), trigger the lost copter alarm... Just a bunch of things that aggregate data.
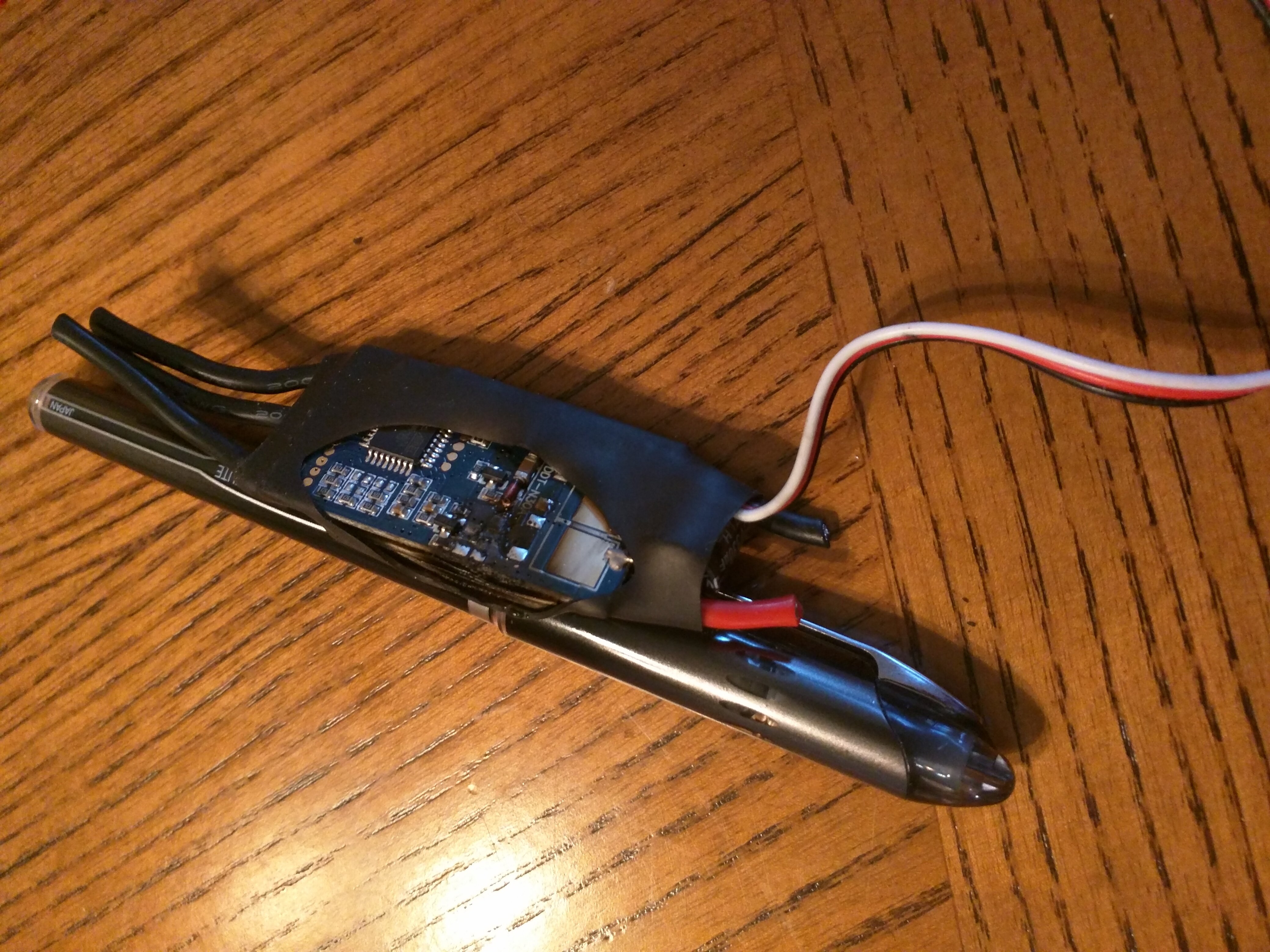
I added this strobe light (one was plenty bright...!) to the tail boom this week. I really like how it turned out. Bright enough to see in full sunlight, too. Dabbling with the Taranis and Pixhawk configuration more, I'm making use of 13 Channels:
- Channels 1-5: AETR and Flight modes, of course
- Channel 6: Tunable Loiter speed
- Channel 7: Normal/Simple/Super-Simple modifers
- Channel 8: Autotune
- Channels 9-10: Sliders for Camera Pitch and Yaw
- Channel 11: Lost Copter Alarm
- Channel 12: RTL
- Channel 13: pass-thru for Strobe LED
Moving RTL to a dedicated switch allowed me to remove it from one of the flight modes (probably a better configuration in a panic situation anyway). I drastically simplified my flight modes to just Stabilize, AltHold, Pos Hold, and Auto.

What this build has been missing is a canopy. The wiring â€nest†from the Pixhawk is unsightly. My first attempt used molded fiberglass inspired by this article: http://flitetest.com/articles/DIY_Multicopter_Canopy_
While poking around Thingiverse looking for a Rasberry Pi case, I found a simple configurable box model. I only printed the bottom plate of the box model, so two ends are just open. I adjusted the dimensions to match the frame and printed it out. At only 64g (half the weight of the fiberglass creation), this could be 'release candidate 2'.
(...and after that printed, I started to think about another possibility: what if I printed the same thing closer to the dimensions of my battery? Use it as a shroud, which could then provide a semi-permanent mounting surface, maybe for a FPV vtx... so that's printing now.)


Finally upgraded the firmware to APM 3.3 and took her out for 10-minute test flight. All I can say is, "Wow!" The stability improvements are fantastic.
You'd especially like the improvements in Yaw. My old 3.2.1 logs would show some jittery behavior when graphing Yaw vs. DYaw. I did the firmware upgrade fully expecting to be able to do a yaw autotune to smooth that out. Well, I haven't done it yet, but the latest graphed Yaw vs. DYaw was super consistent and stable. Autotune not required, imo.
I'm waiting for the camera battery to recharge to see if there's an observable improvement there, too.
Just a sample of video where there's jello in the camera-down position (maybe it's just from prop-wash and there's nothing to be done about it)... oh, and I wonder how I can setup my SJ4000 so I can get a better exposure during sunset there at the end.... ?

The issue with the sunset shot is... The sun light was too bright, which caused the camera to adjust it's exposure, hence why the tree area became dark. These little action comes have poor dynamic range, so it will exposure for the high or the low (pick one). You can play around with the exposure compensation, but I doubt it will help much. The metering mode of the camera will determine what is used as a reference point for it's exposure. It most likely some sort of evaluative metering mode, but I doubt it can be changed. Either way, experiment with the camera angle during sunsets, so the camera adjusts for whatever you're shooting. :)
As summer draws to a close, it's getting darker earlier in the evening so it's time to think about lighting. These LED boards were delivered today (the price is way incorrect!). I couldn't decide on a color scheme, so this switching option was attractive.
Did you get 5v or 12v ones? I first thought about the 5v option and power them from the output rail of the Pixhawk. Then I figured the 12v would be brighter; I can power them from the same voltage regulator that feeds the gimbal. Sitting here, now, though I think I also want a small switch to turn the lights off during the daylight hours. Are they so bright they might bleed into the camera field of view?
This looks like a ton of fun! My next build will certainly be a Tri-Copter. Just not sure which one yet.
I noticed you're using 4s 10000mah battery. HK had a crazy sale on the Multistar batteries the other day, I think they were under $30. Sadly I just checked and the sale is over. Although they are only 10c, which can handle a 100A draw. My 800 sized quad only pulls 60-85A, so I bet yours would be fine as well.

Borrowed an idea from the CX-20 thread on RCGroups about accelerometer calibration. Using bottles or glasses to level the motors for step 1. It makes a load of difference! Maybe because this is a Y config and naturally heavier in front, but whatever...Stabilize is just as steady now as PosHold.

Get a chance to fly this weekend? I got some great footage in the mountains. I'm working on the video now.
Ah, I look forward to seeing it! uavforecast.com showed a high Kp index for parts of Saturday and Sunday... any issues with GPS lock?
No flying for me this weekend but I was visiting with my sister who shared she's picked Natural Bridge as her wedding venue. I told her I wanted to get with the photographer about taking some aerial photos/video before and after the ceremonies.
Yes, I had some GPS issues yesterday in the mountains. I was stuck at HDOP 2.3 and it only dropped to 2.0 after several minutes. It was trying an RTC any time I enabled PosHold, so I kept it in AltHold. The GPS was great on Friday though.
I'd love to see Natural Bridge someday, but it's far too pricey. Looks like a great place to get some aerial video though!
Wow, that's a crazy battery you got on there! How many minutes can you get on that?
The battery alone is right about 1/3 of my total AUW. I'll get 24 minutes running to ~20% capacity remaining. Personally, flying that long in a single session is exhausting though I've done it a few times now. It's much more common for me to take it out for many short duration flights, and just charge less frequently. My little SkyRC b6 charger takes nearly 3 hours to charge this thing!
I haven't added it to the parts list, but I started with an 8000mah Zippy from HobbyKing (16-19 minutes), but I found the weight of this one to be the same... 845g if I recall the specs correctly.








I'm not going to change the parts list yet, but a Firefly 6S just arrived in the mail today. Now, if the wind will ever stop, I'll get a chance to try it out.
FIrefly6, Mad jelly.
I dunno...I think the picture quality/color reproduction might be better with the Yi. I do like that I can configure the Firefly without needing an app, and I want to try the Gyro feature when mounted to my gimbal.
I've just gotten the gimbal reattached. With the 12v BEC, my voltage to the controller has increased from 11.65v to 12v. I had hoped the difference to be insignificant, but it has introduced buzzing in some positions, so I'll need to tweak the setup...maybe just decrease vmax.
From what I've seen of the Firefly it looks much more crisp than the Yi. Do you have a retina or 4k display? You can clearly see the difference on a high-dpi display.
I totally though you guys were talking about this, http://www.birdseyeview.aero/products/firefly6 , Not an action cam.
I have a 30" Retina display. I thought the one picture I took was murky...dull colors. Of course, I'll keep playing with it, and who knows... maybe it'll get airborne this Spring.
Did you record in 1440p?
No, I just snapped some photos. I gave it another try today and I take all the criticism back. The photos were crisp, the video (just handheld) was very clear on the 2.5k video at 30fps.