
Summary:
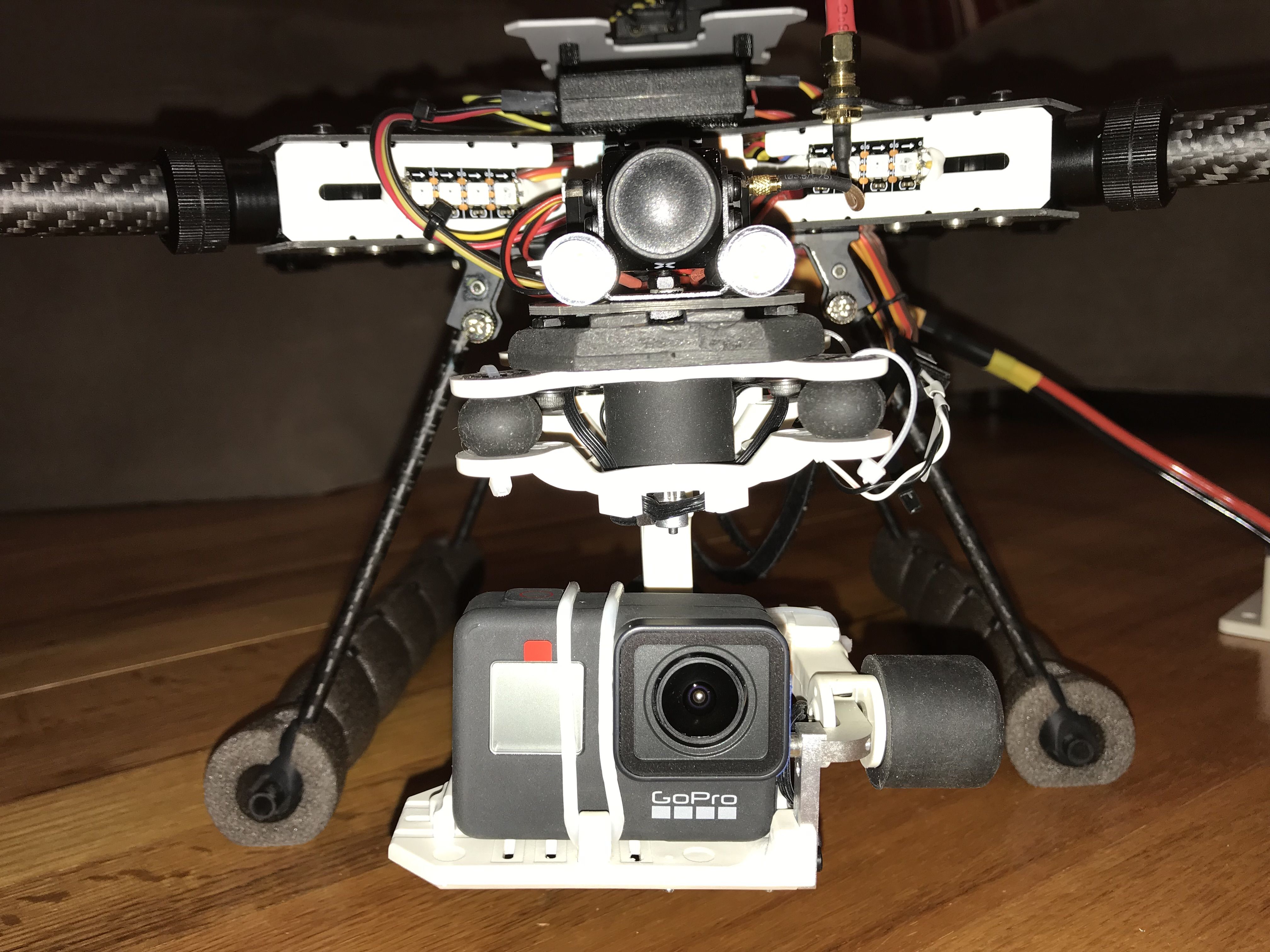
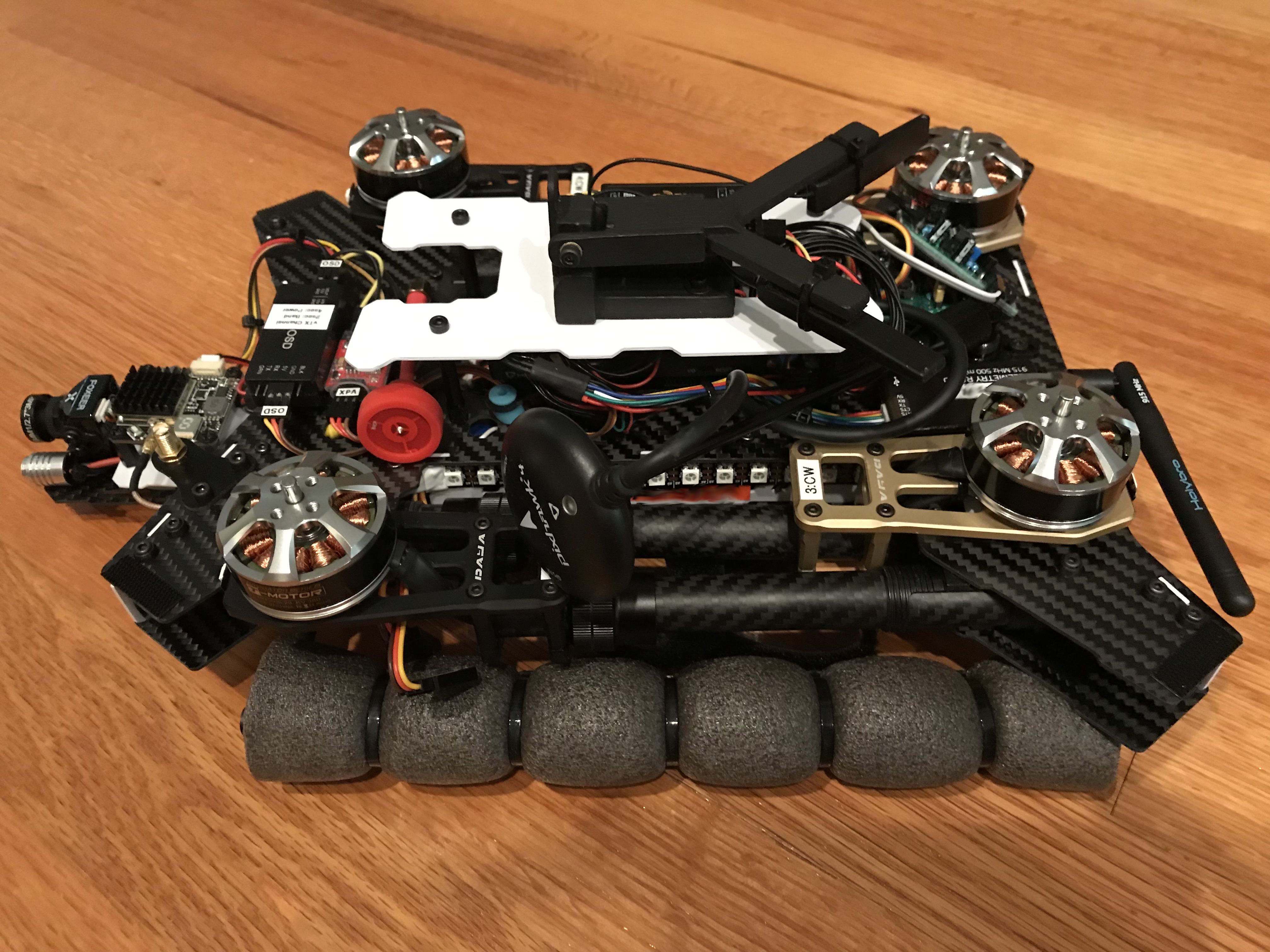
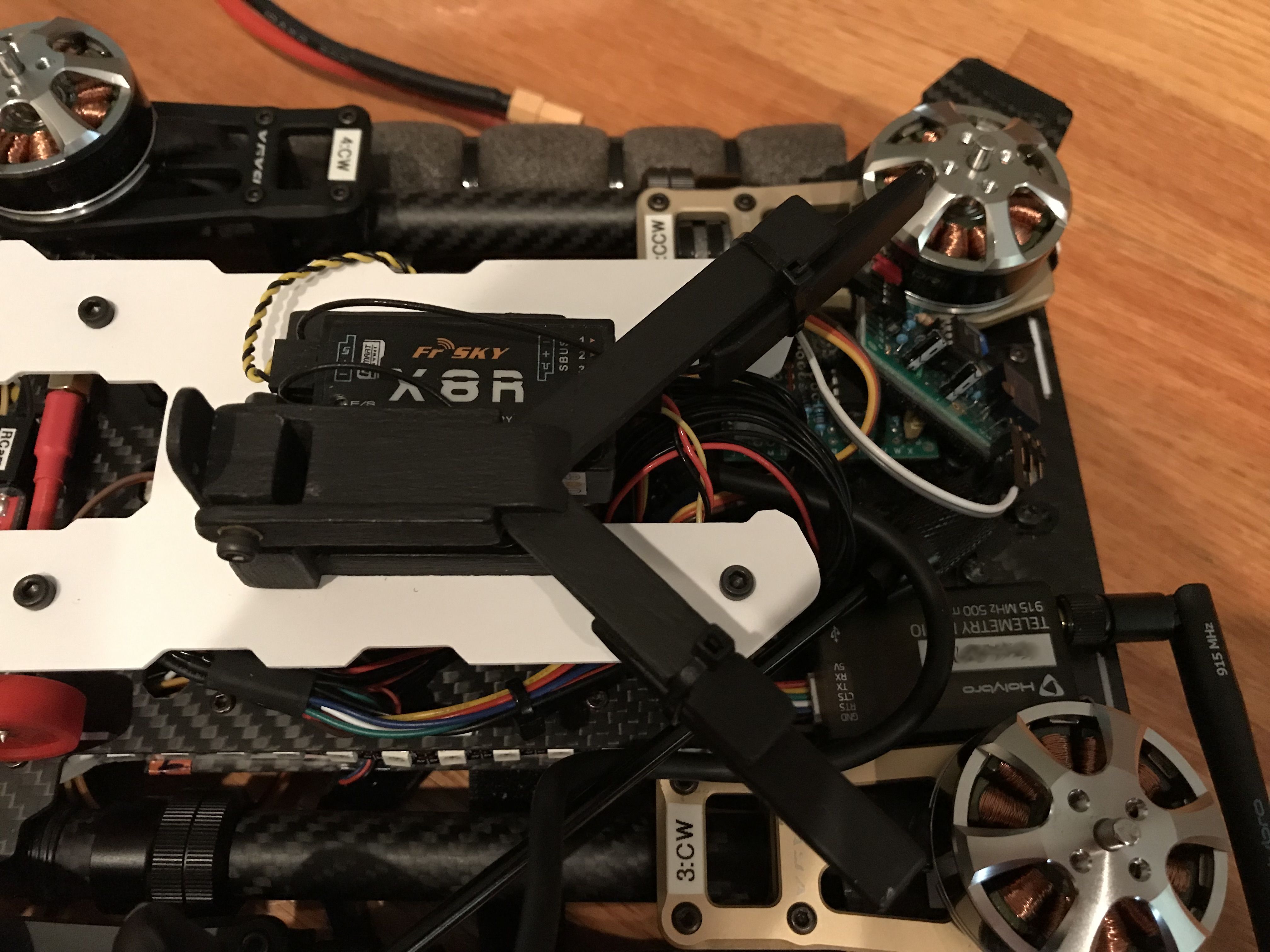
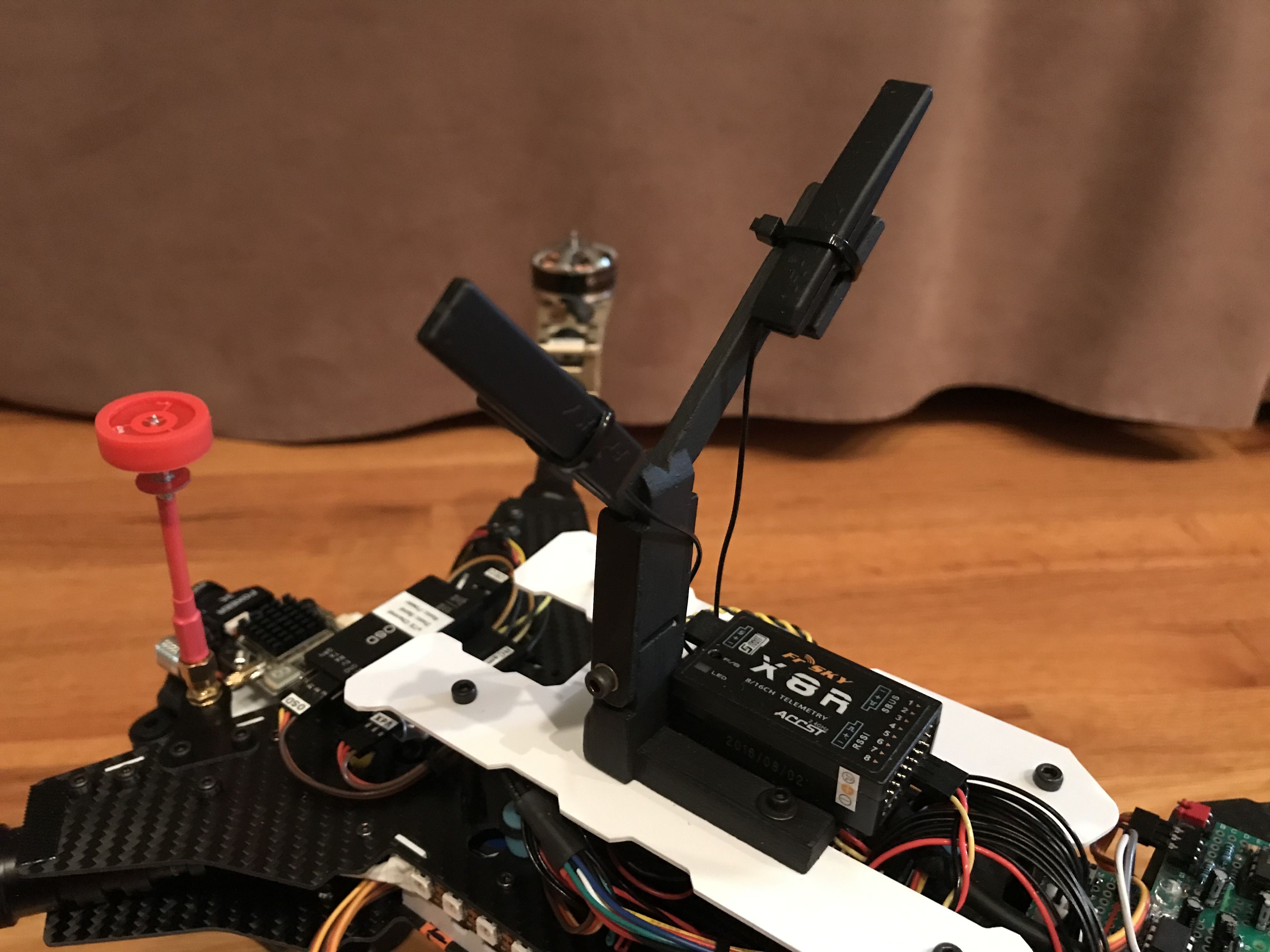
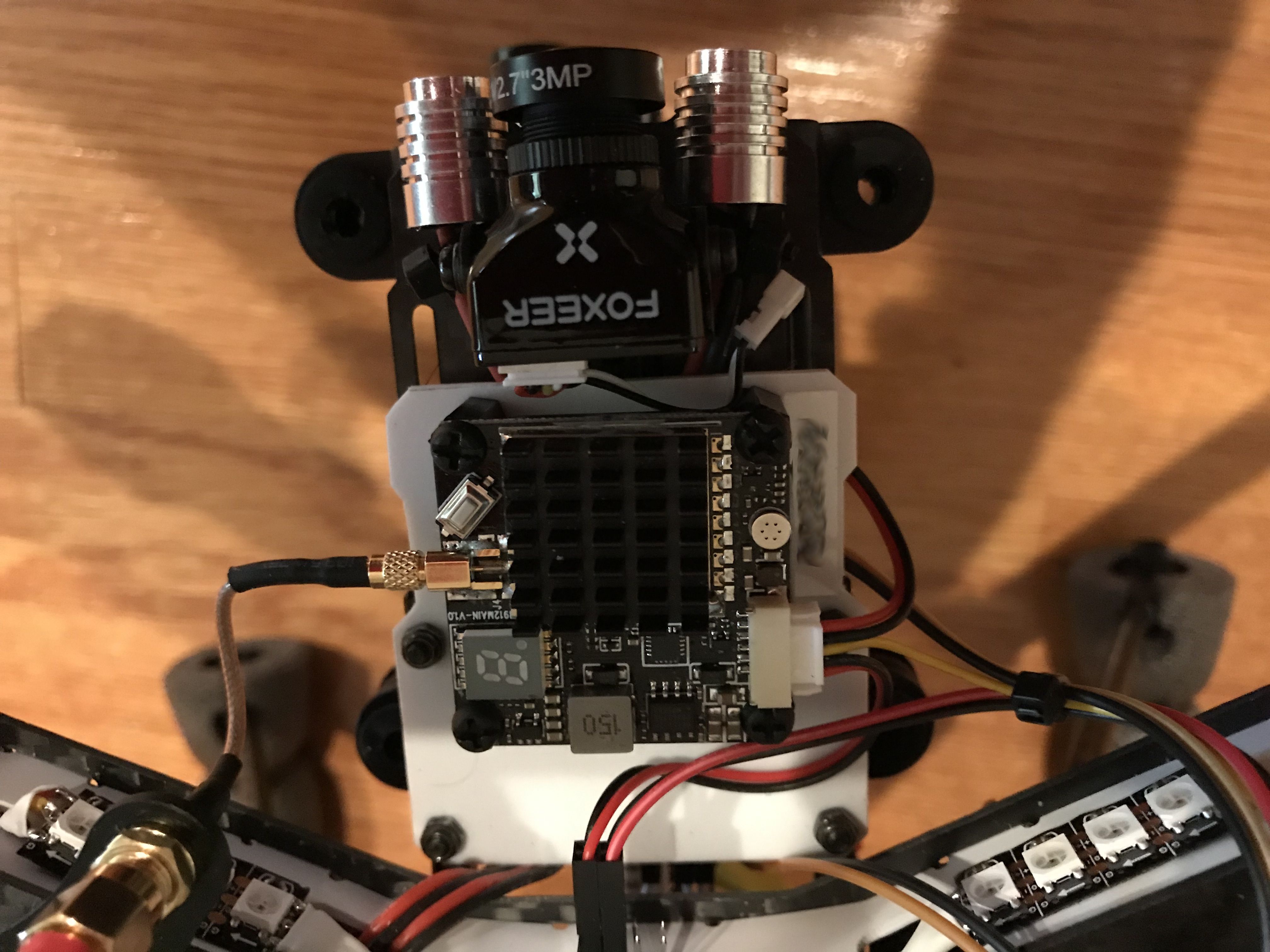
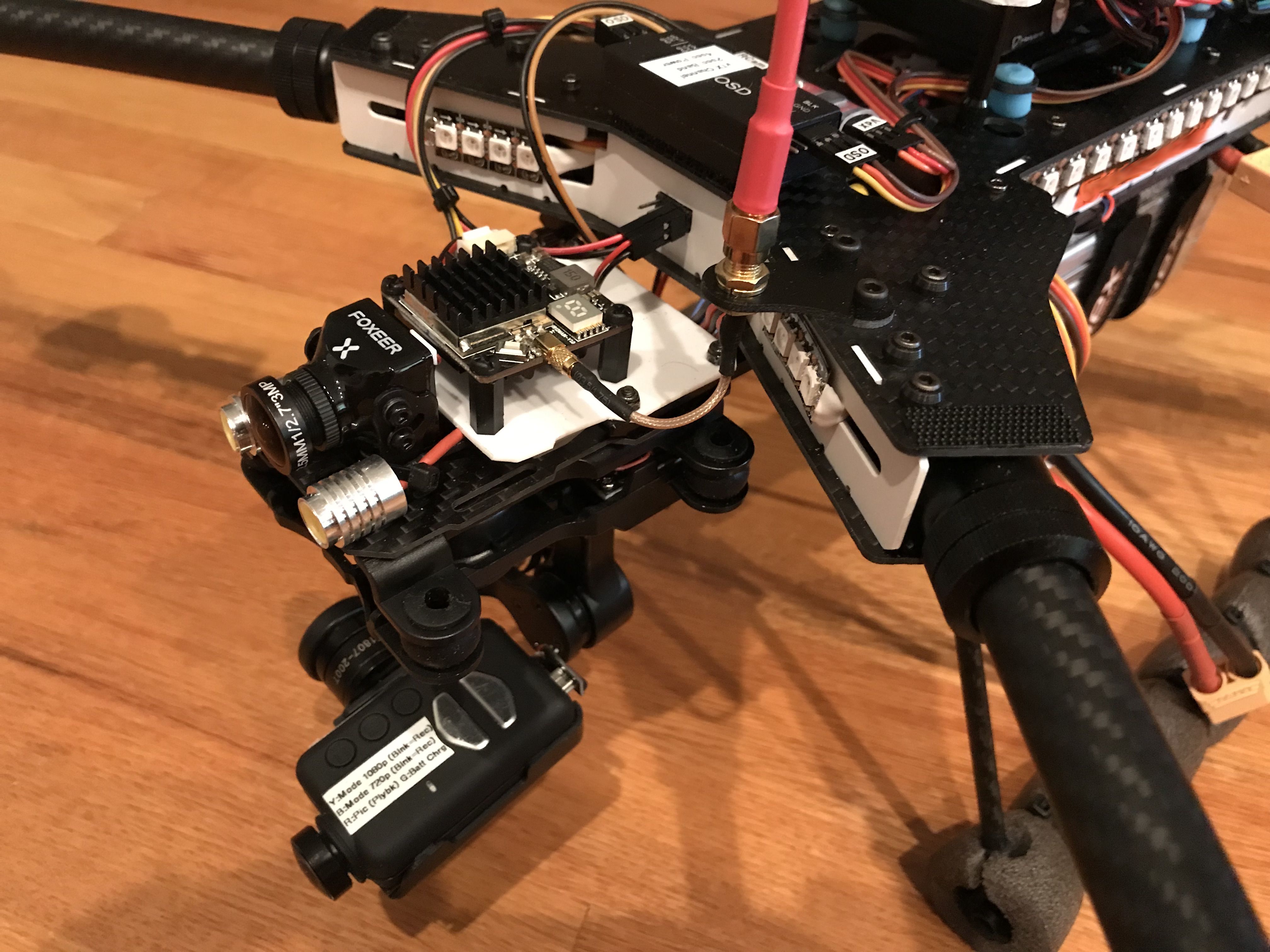
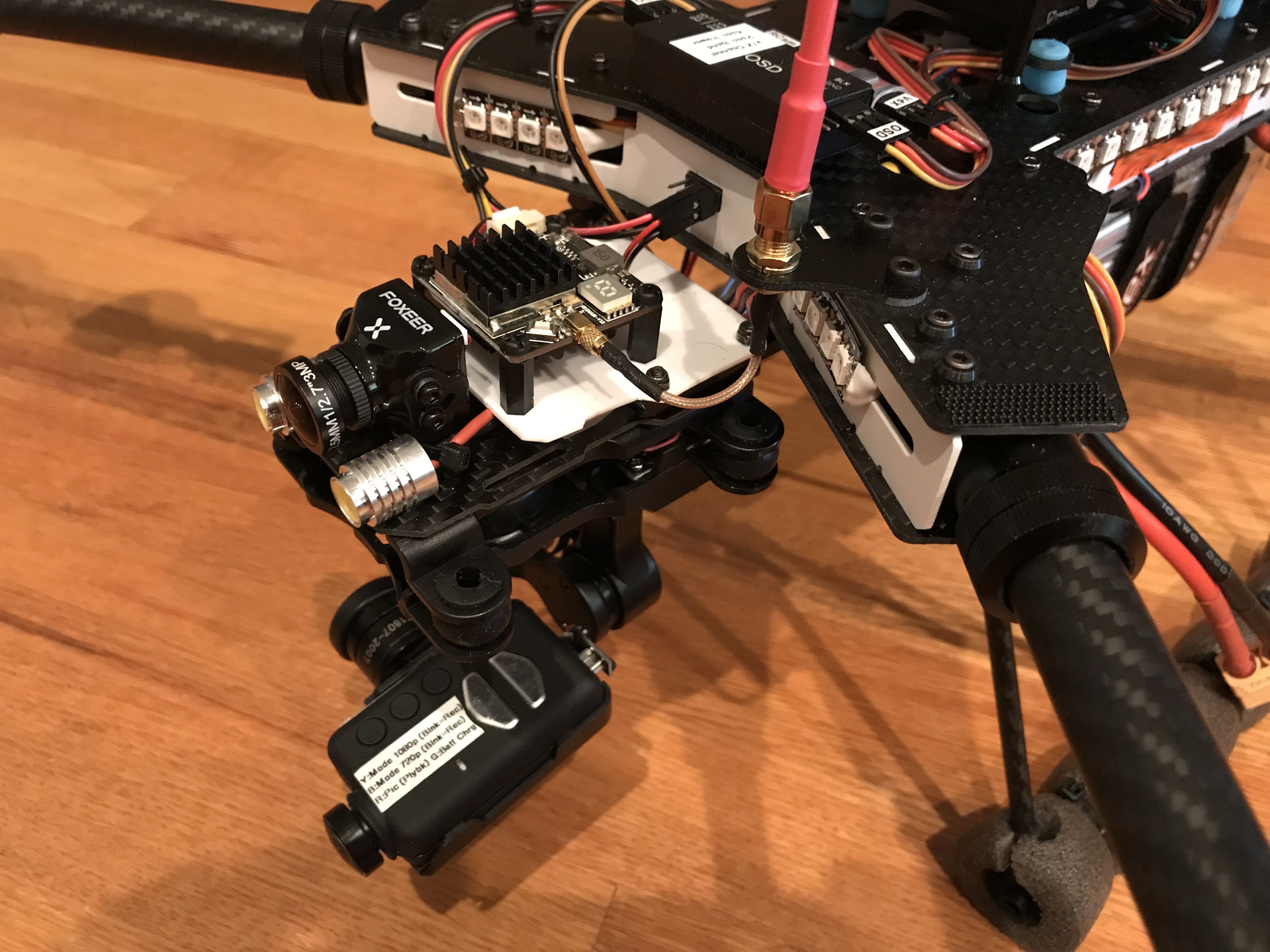
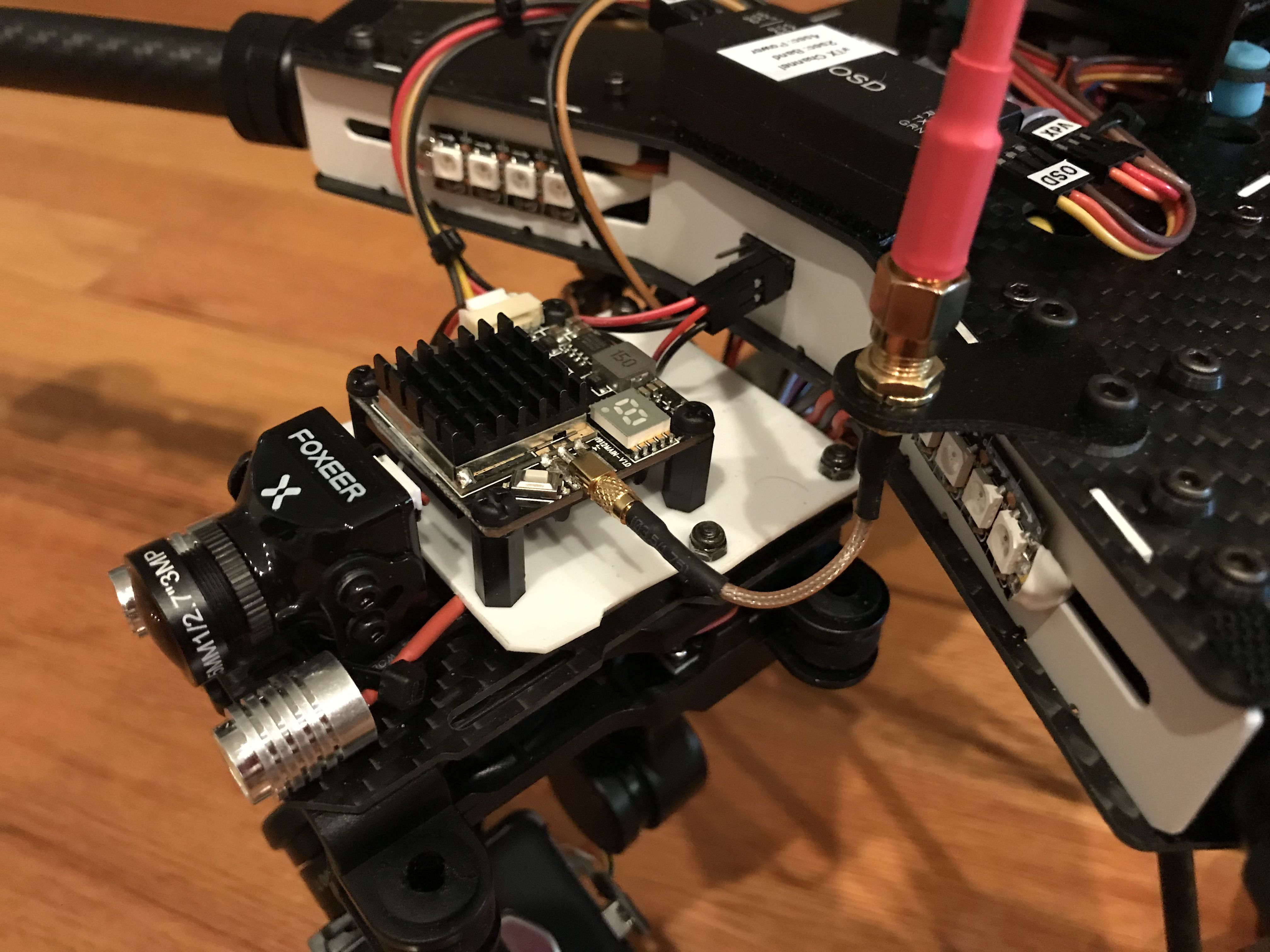
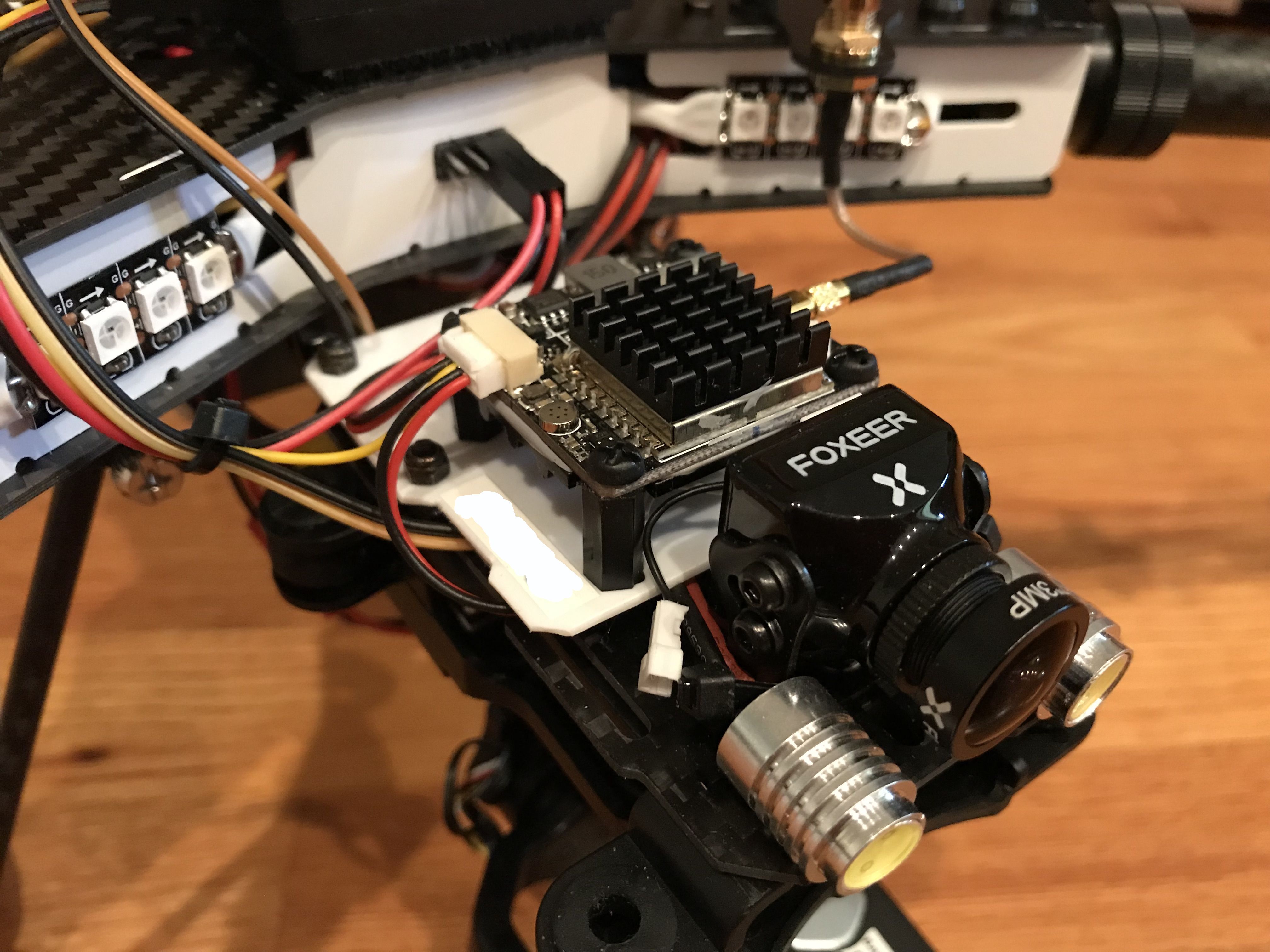
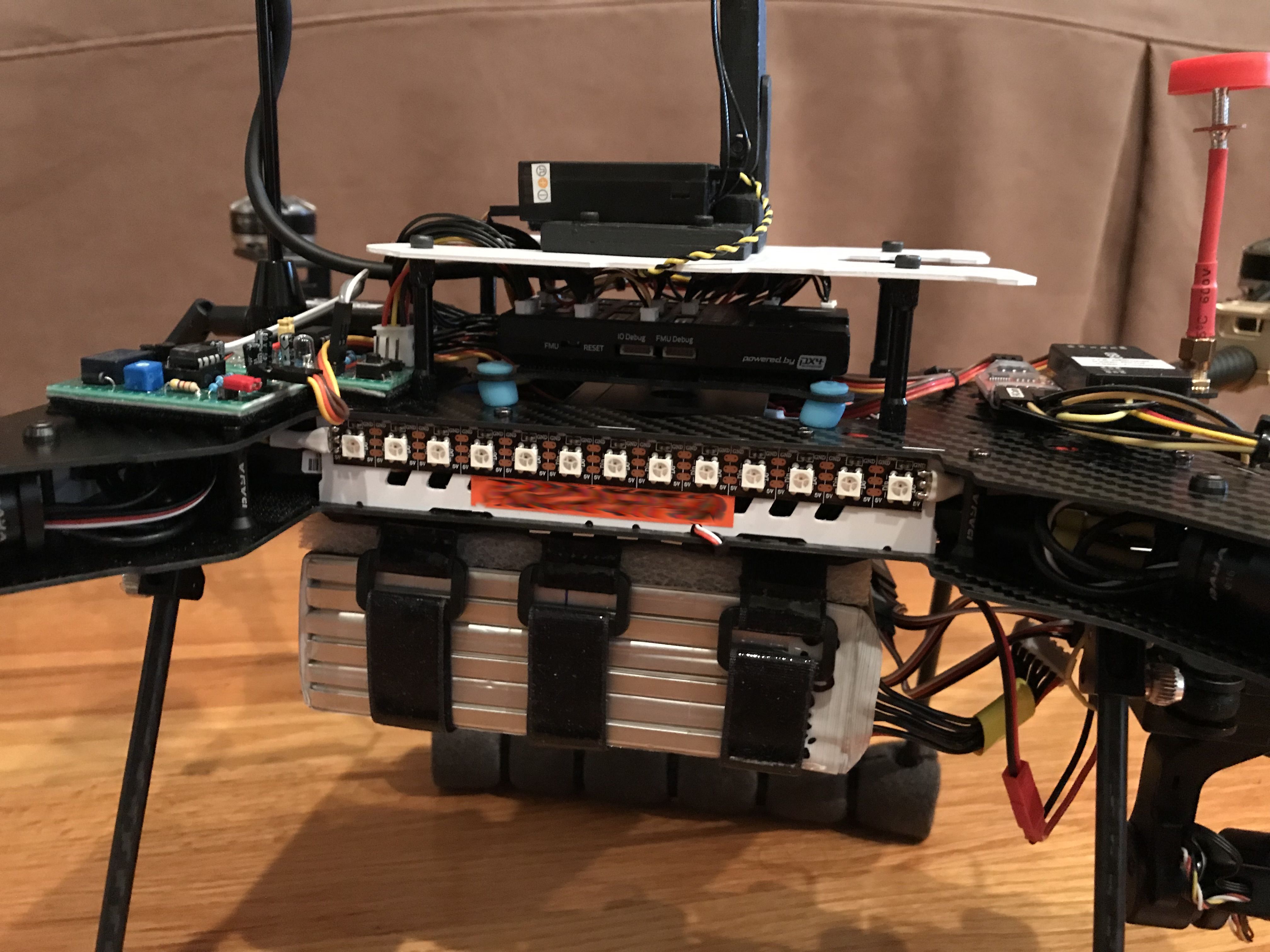
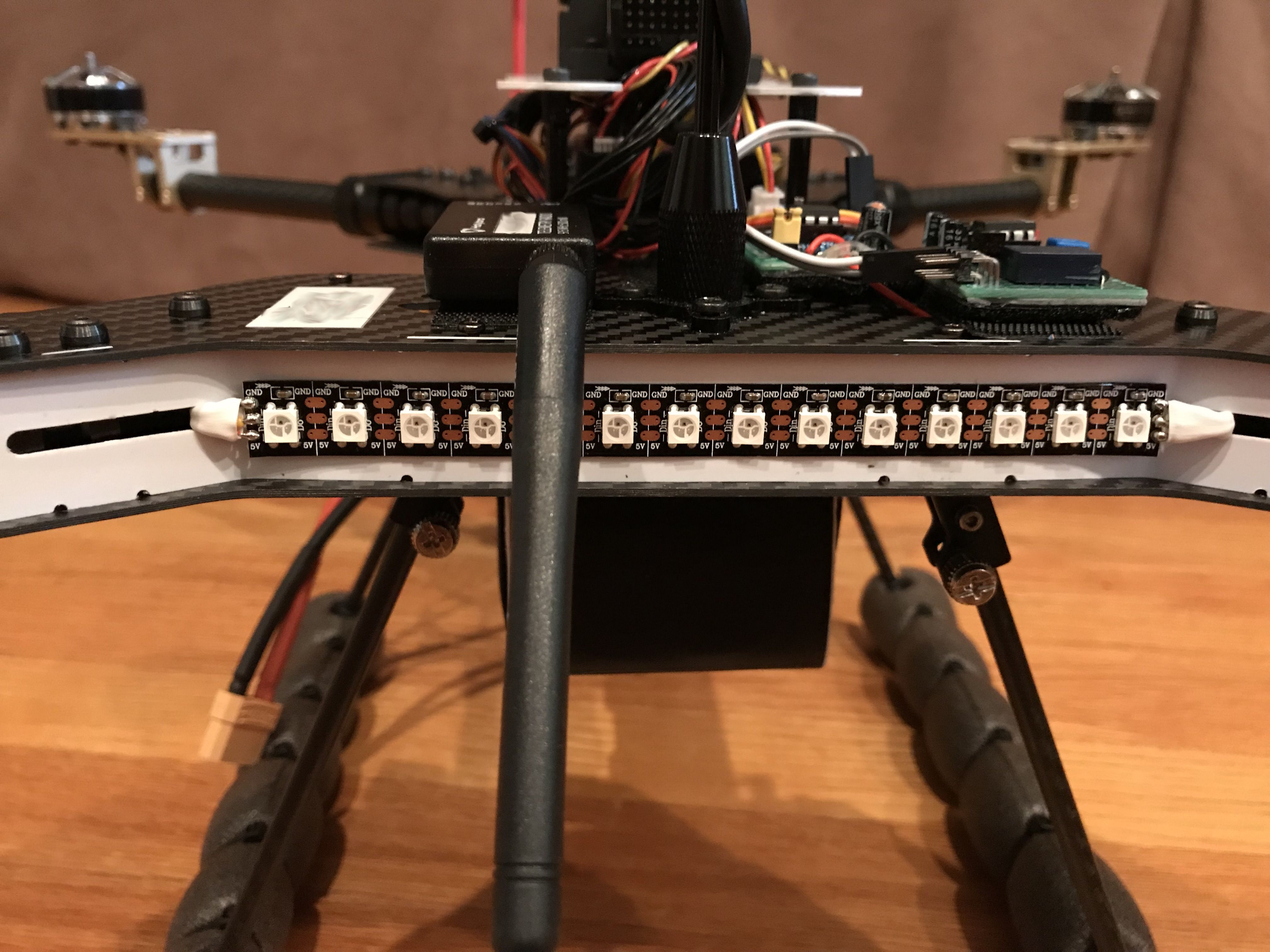
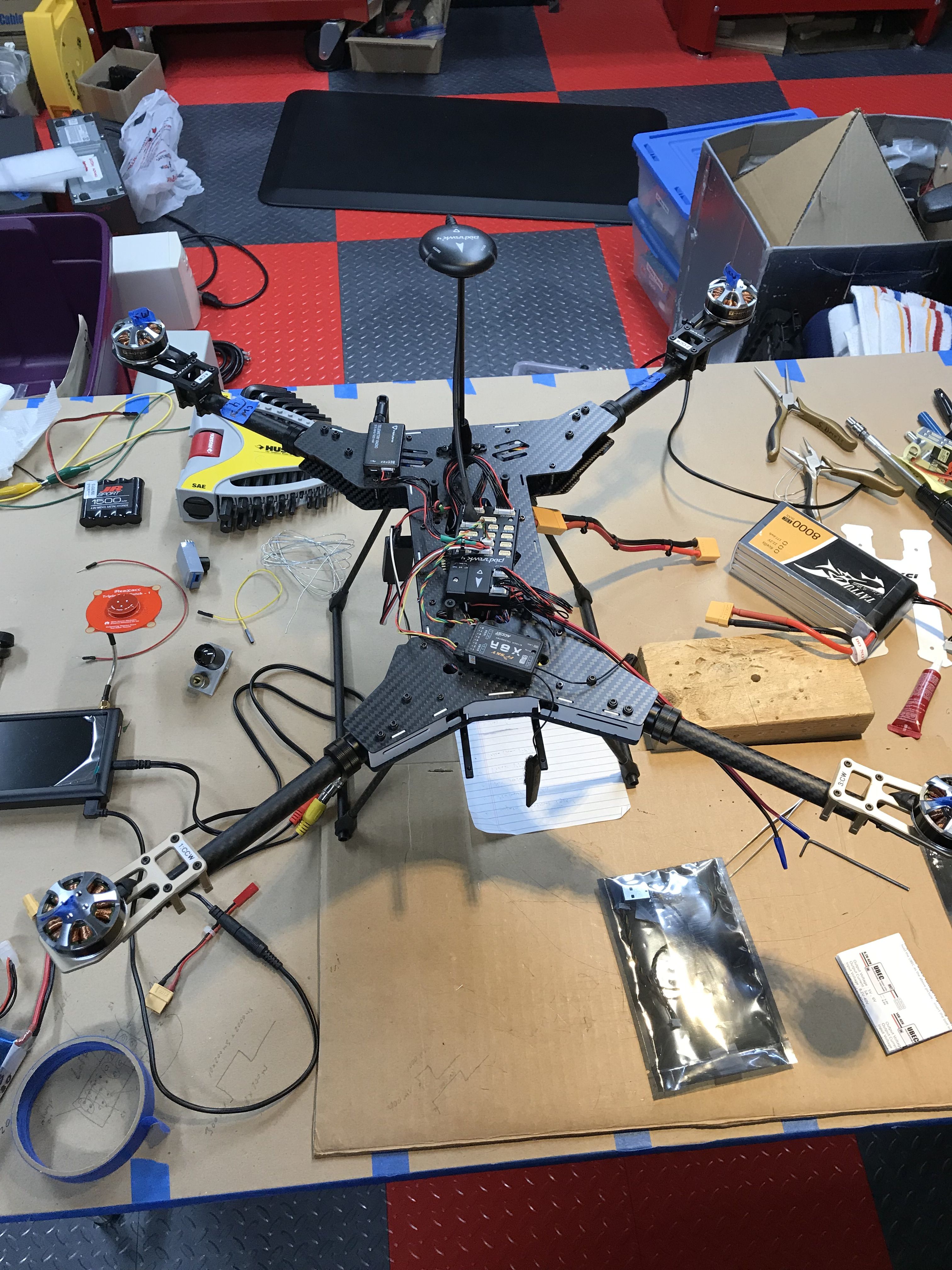
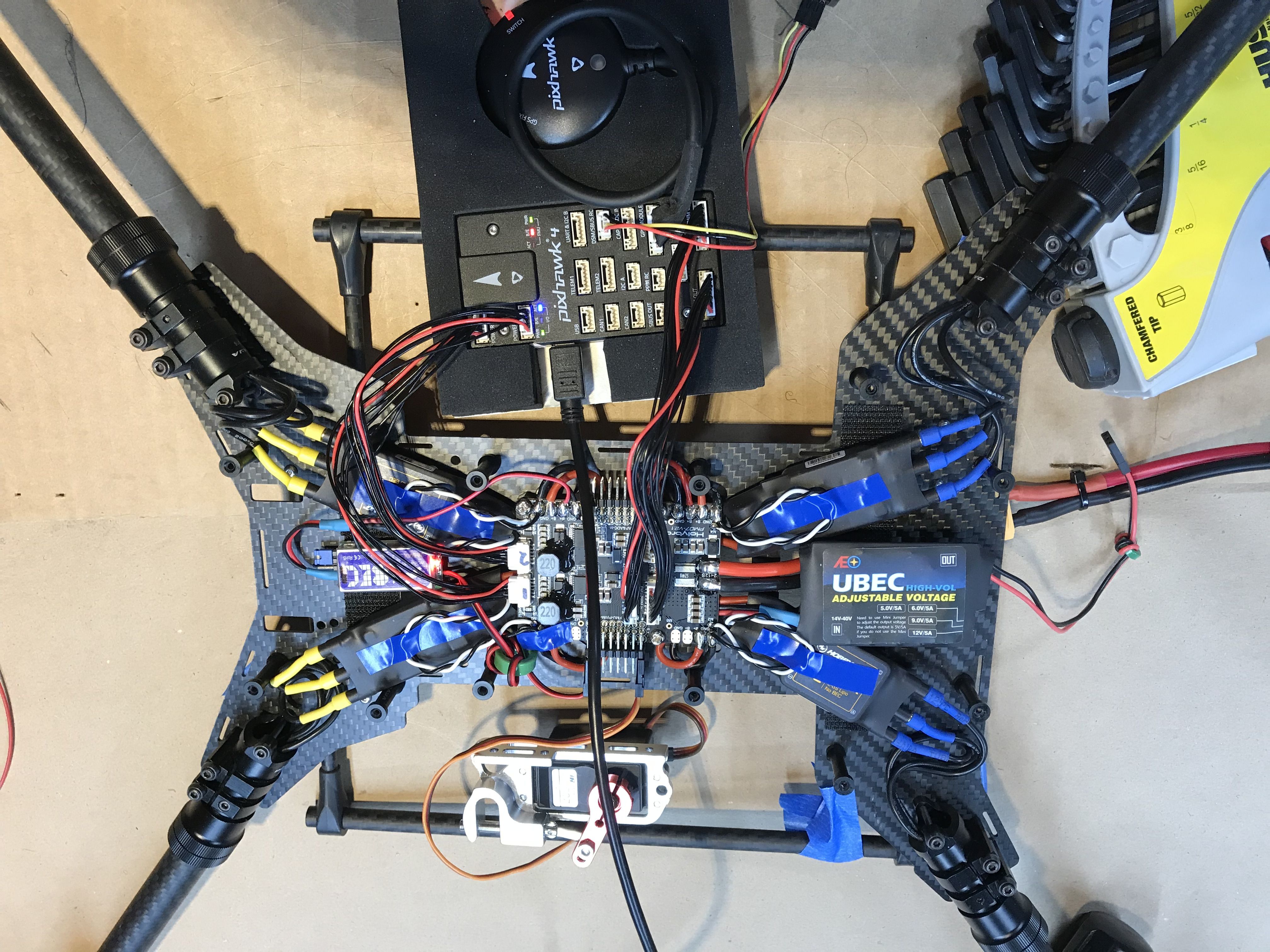
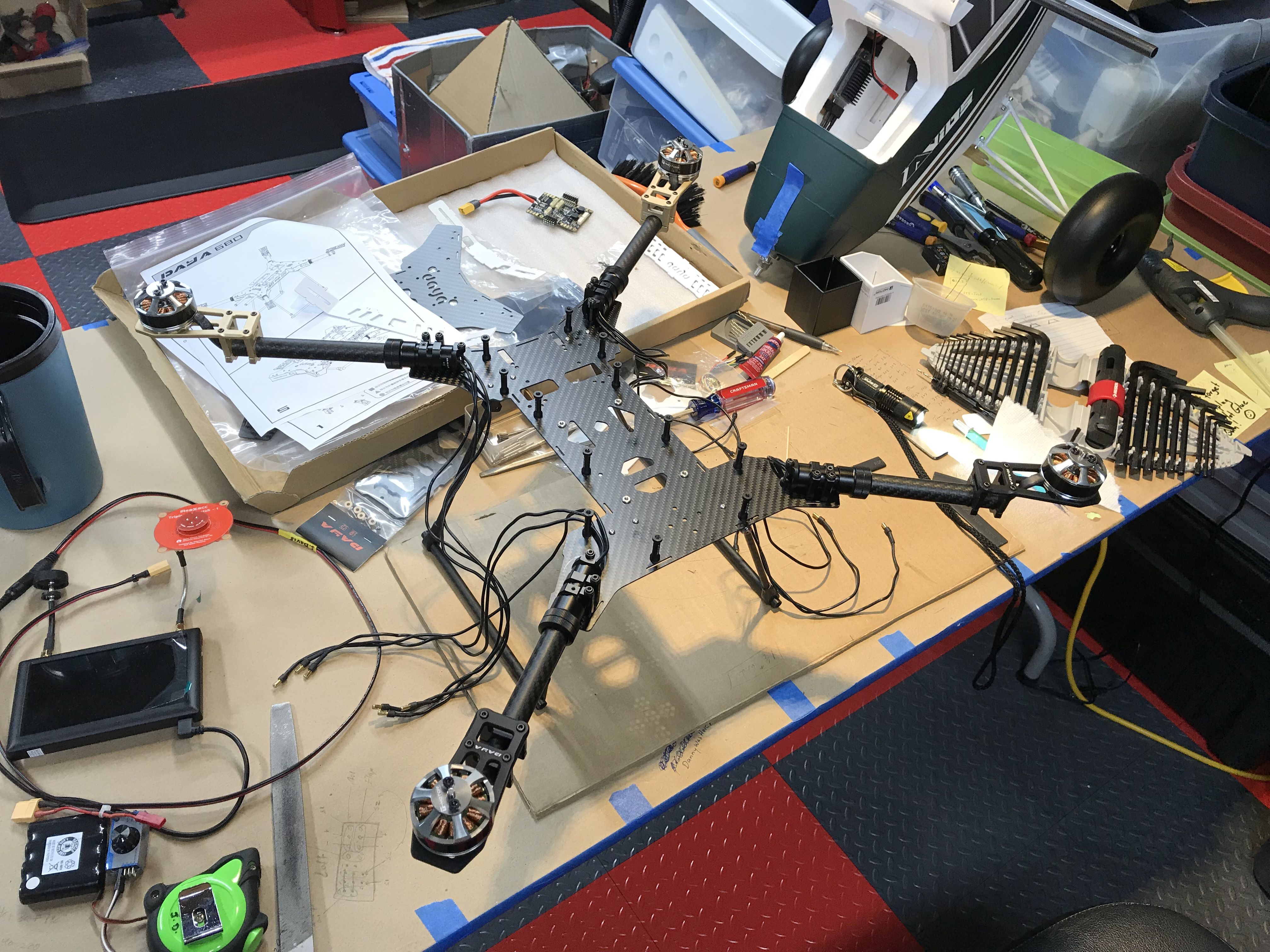
Daya 680 Carbon Fiber quad frame with T-Motor 380kv motors swinging 14x5.5 carbon fiber props powered by a 6S 8000 mAh ~2lb LiPo (total weight is just under 5 lbs). The flight controller is a Holybro Pixhawk4 running AuduCopter v3.6.8. Telemetry features include Holybro 900 MHz SiK radio to ground station running Mission Planner and MAVLink telemetry pass-thru to the FrSky SmartPort for display on the Taranis X9D using Craft & Theory FlightDeck software. Video features include a fixed Foxeer 16:9 1200TVL Monster V3 and a Quanum 3-axis gimbal for a Mobius HD action cam. A remote video switch selects one of three video sources which is routed to a on-screen display module, then on to the 25mW to 2W AKK FX2-Dominator 5.8 GHz video transmitter. 4 RGB LEDs on each arm respond to MAVLink messages to indicate flight controller status and orietation. 48 additional RGB LEDs are controlled by a Atmel ATtiny85 microcontroller with patterns selectable remotely (strobes, marker lights, and other custom patterns).
Build:
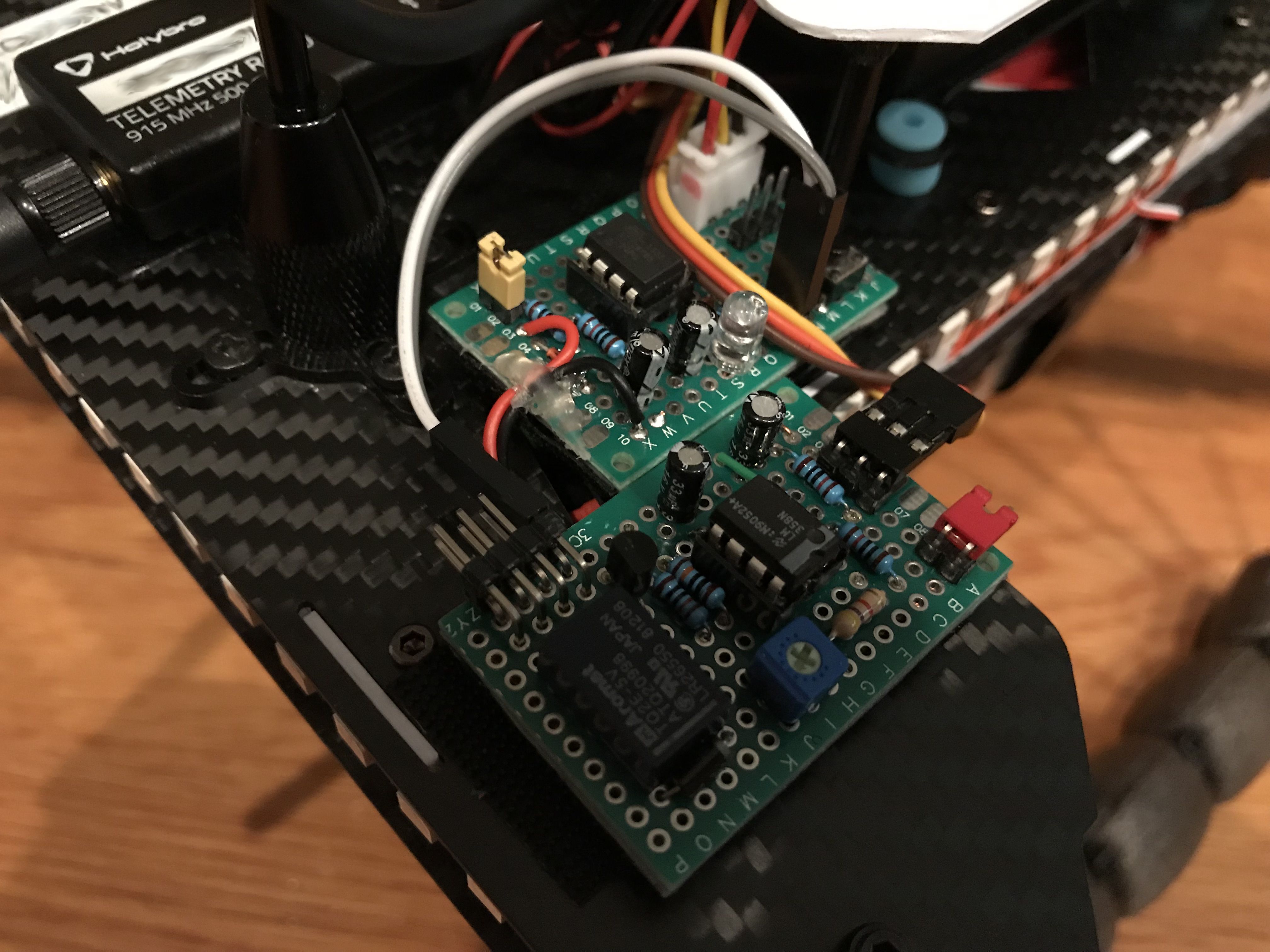
I wanted to build a bigger platform for experimentation and to carry heavier payloads. Sorry, not much of a build log, but feel free to ask questions and I'll try my best to answer them! I don't have a 3D printer, so my custom parts were made from balsa and hand-cut from plastic. I added custom electronics for controlling the strip LEDs and for remote ON/OFF and mode switching. I'm also using FrSky telemetry pass-thru to send flight data to my transmitter via FlightDeck from Craft & Theory (which is an awesome product).
Maiden Flight:
The 14 minute maiden flight was uneventful with everything nice and stable. Modes tested were stability, loiter, alt hold, brake, and Return to Launch. No vibration issues and it has plenty of lifting power with a ~2lb 6S 8000 mAhr battery. It can climb aggressively and is very stable in a fast drop thru its own prop wash. Very impressed with the Holybro Pixhawk4! Next, I have to wait for a calm wind day to complete the PID tuning (using the autotune feature in ArduCopter).
Notes:
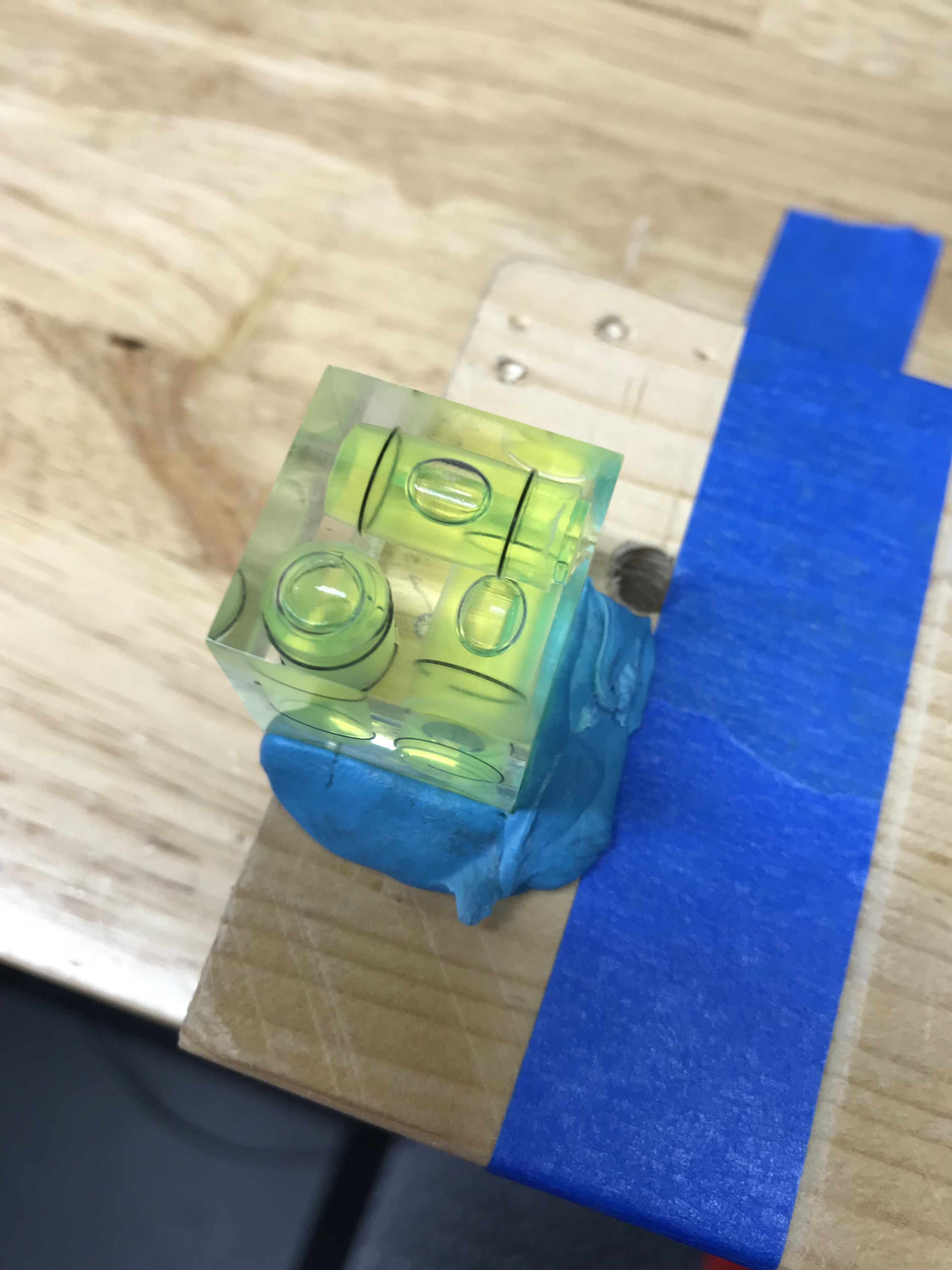
- I had to remove the IMU board in the Quanum Gimbal and re-calibrate it using the 6 position technique described in the user manual before it would track properly. I used a leveling cube pictured below to ensure all axes were level. The user manual states that the IMU is calibrated at the factory, but mine was not. It would tilt (roll) sideways as it moved in the horizontal plane. Now it works very well.
- I purchased a MAVLink LED controller from AliExpress which had two LEDs for each of its 6 channels -- two LEDs front, two LEDs rear, and two LEDs placed on the sides. These LEDs were barely visible from the ground, so I added two more LEDs on each channel (the maximum 4 per channel allowed for this particular controller), placed the LEDs under each motor so that the last LED wraps up around the end of the arm. That way they are now visible on the ground and in the air. Big improvement!
- I currently have a rail installed under the video transmitter that I can slide on/off different accessories. Currently, I have two accessories: the Quanum Mobius gimbal and a servo controlled dropper.
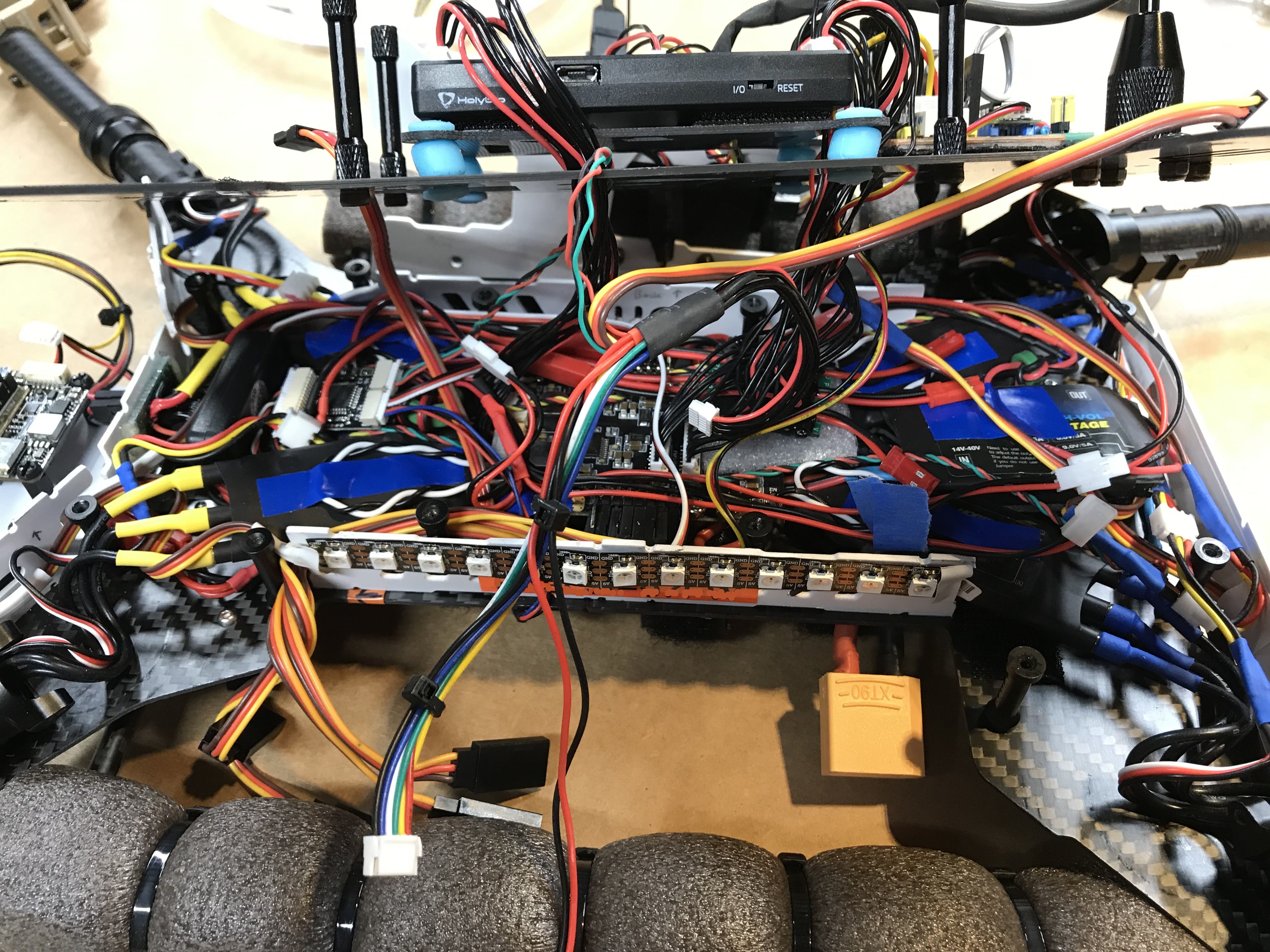
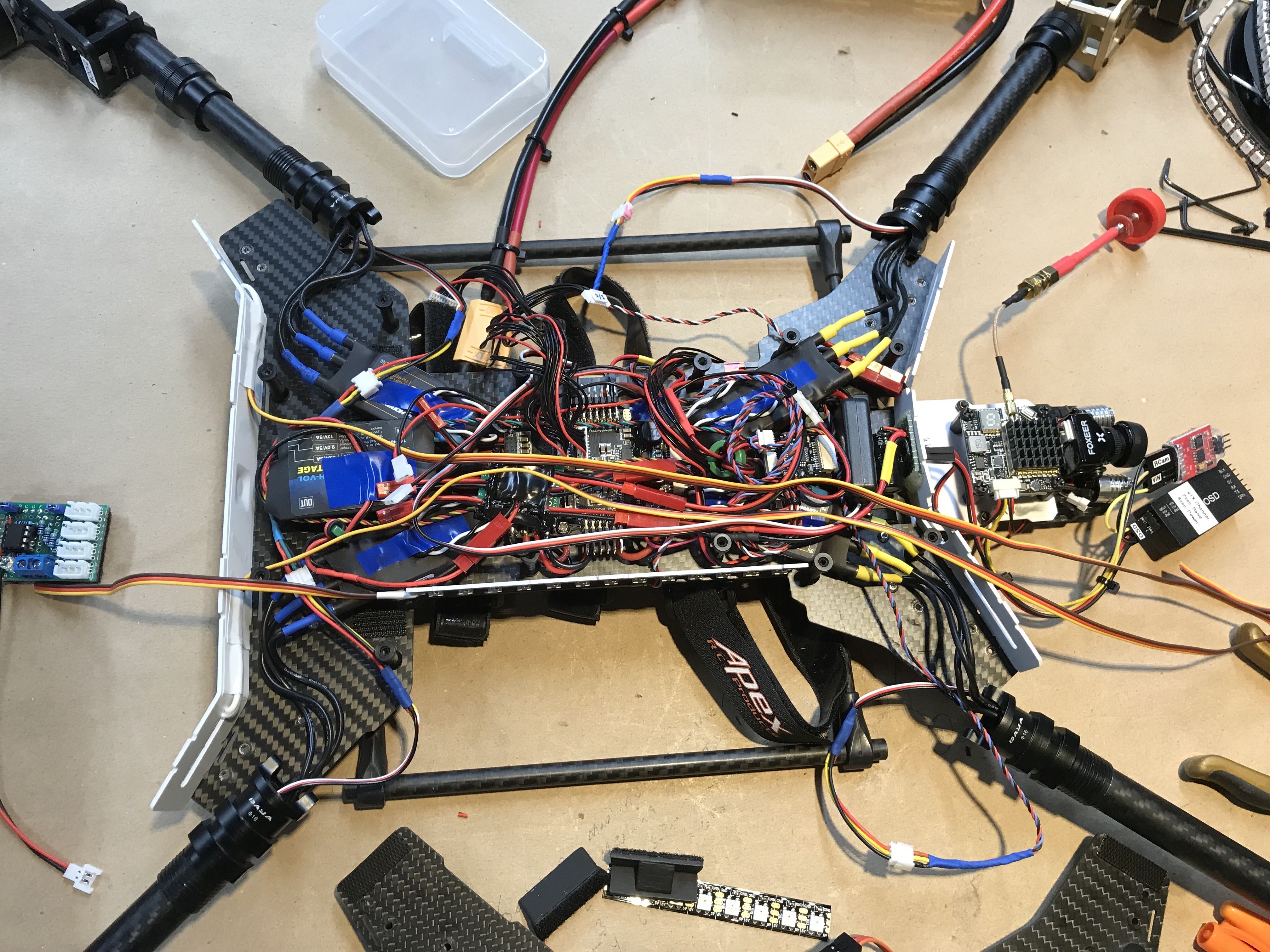
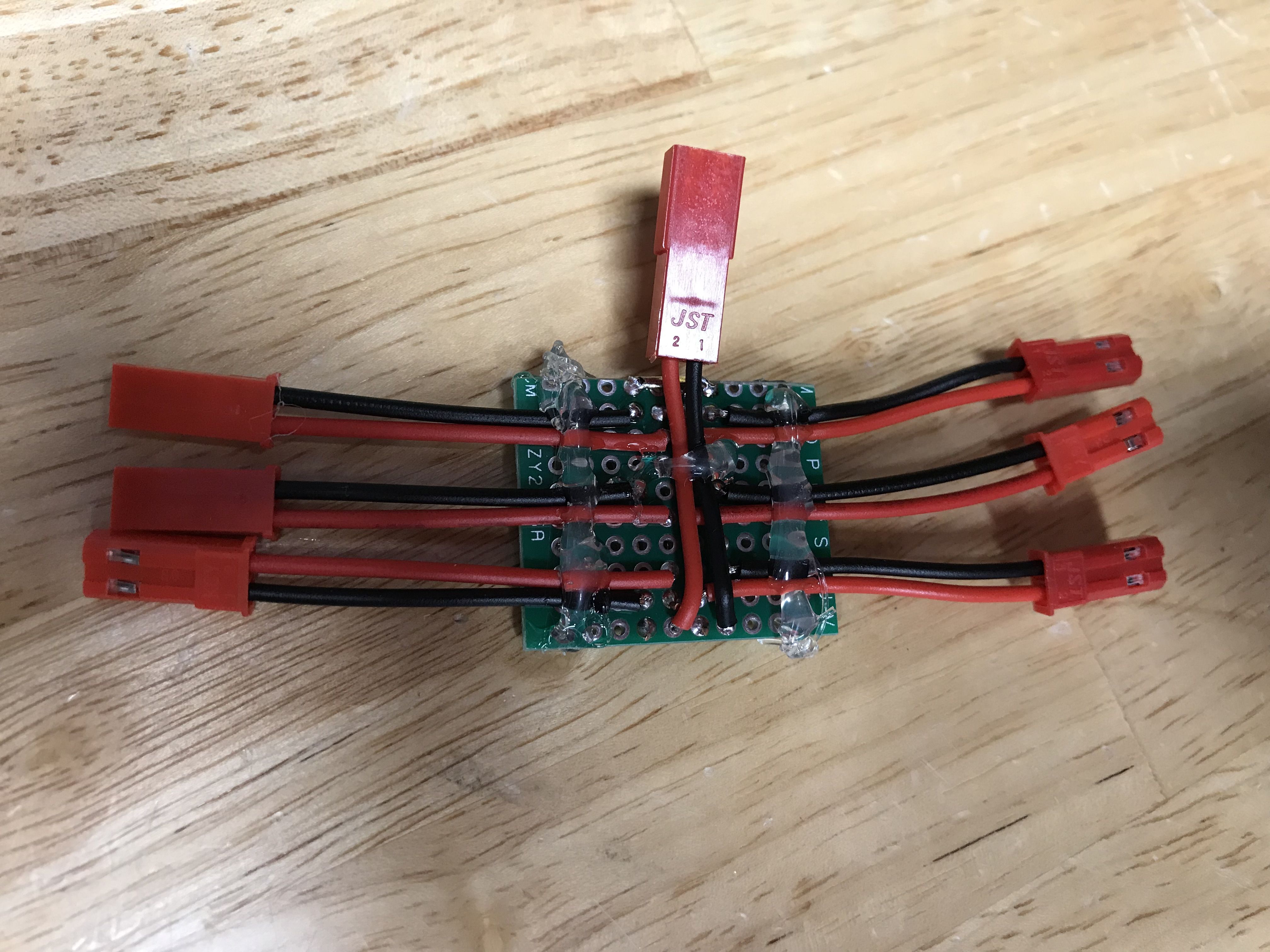
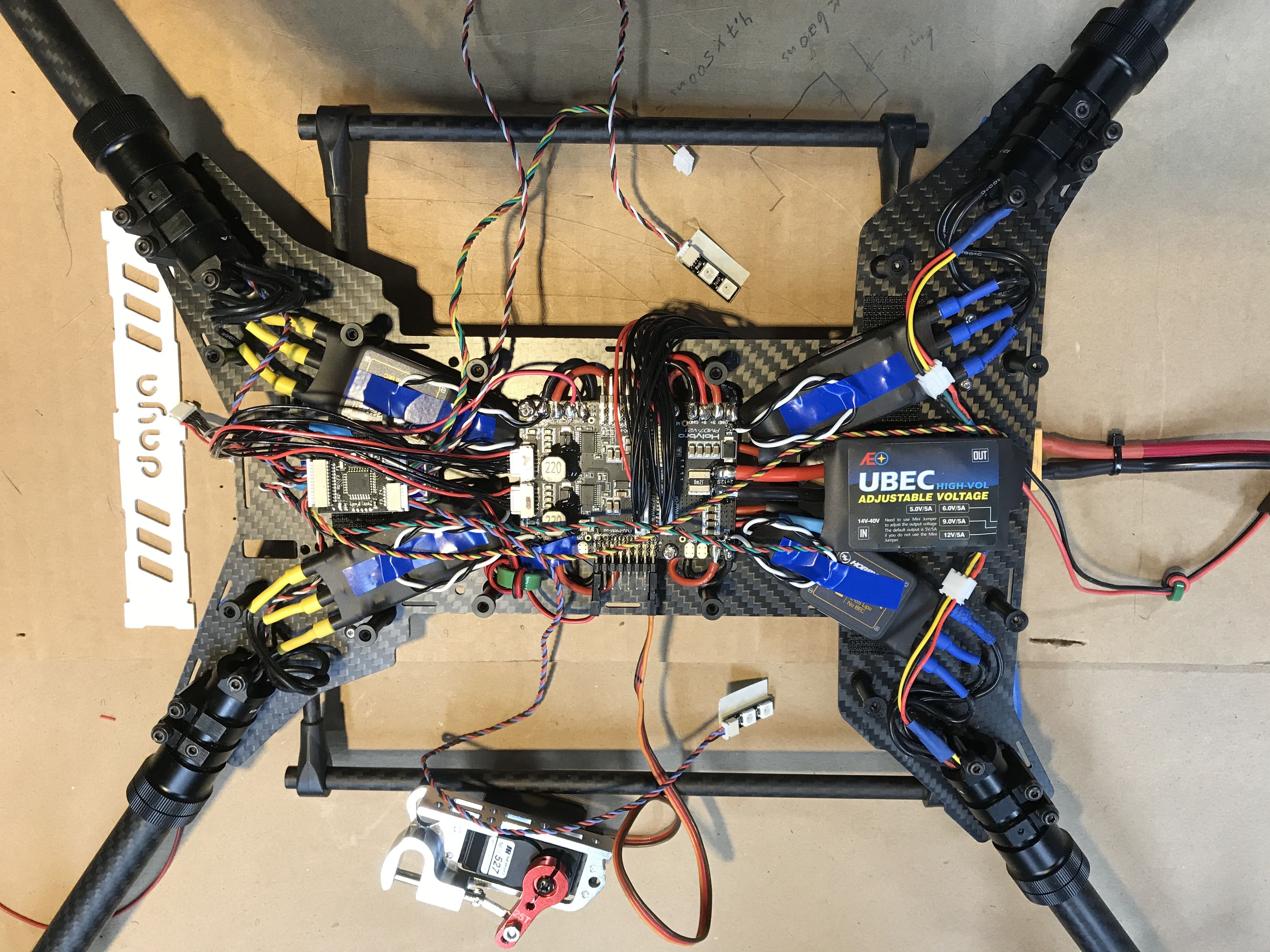
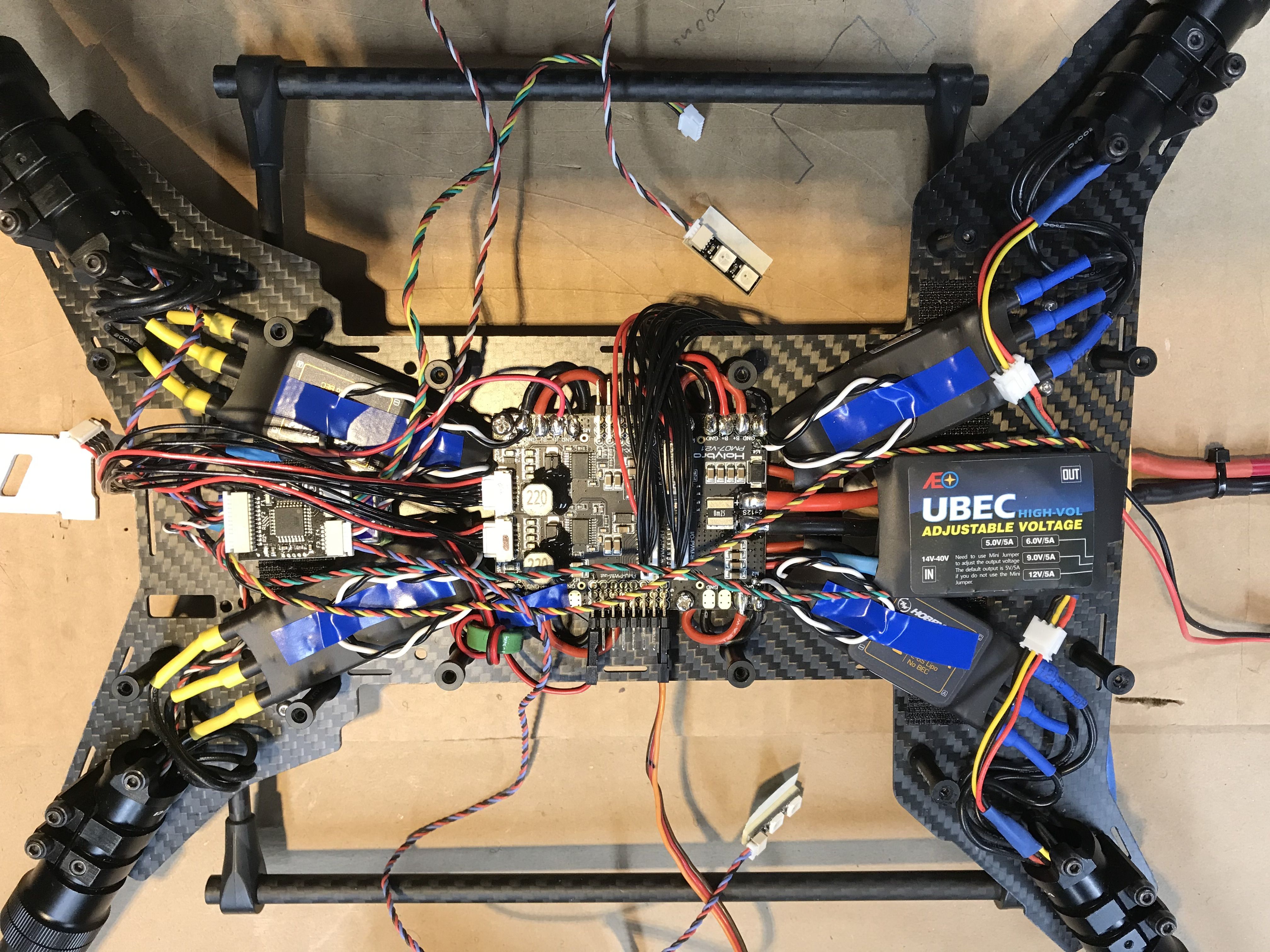
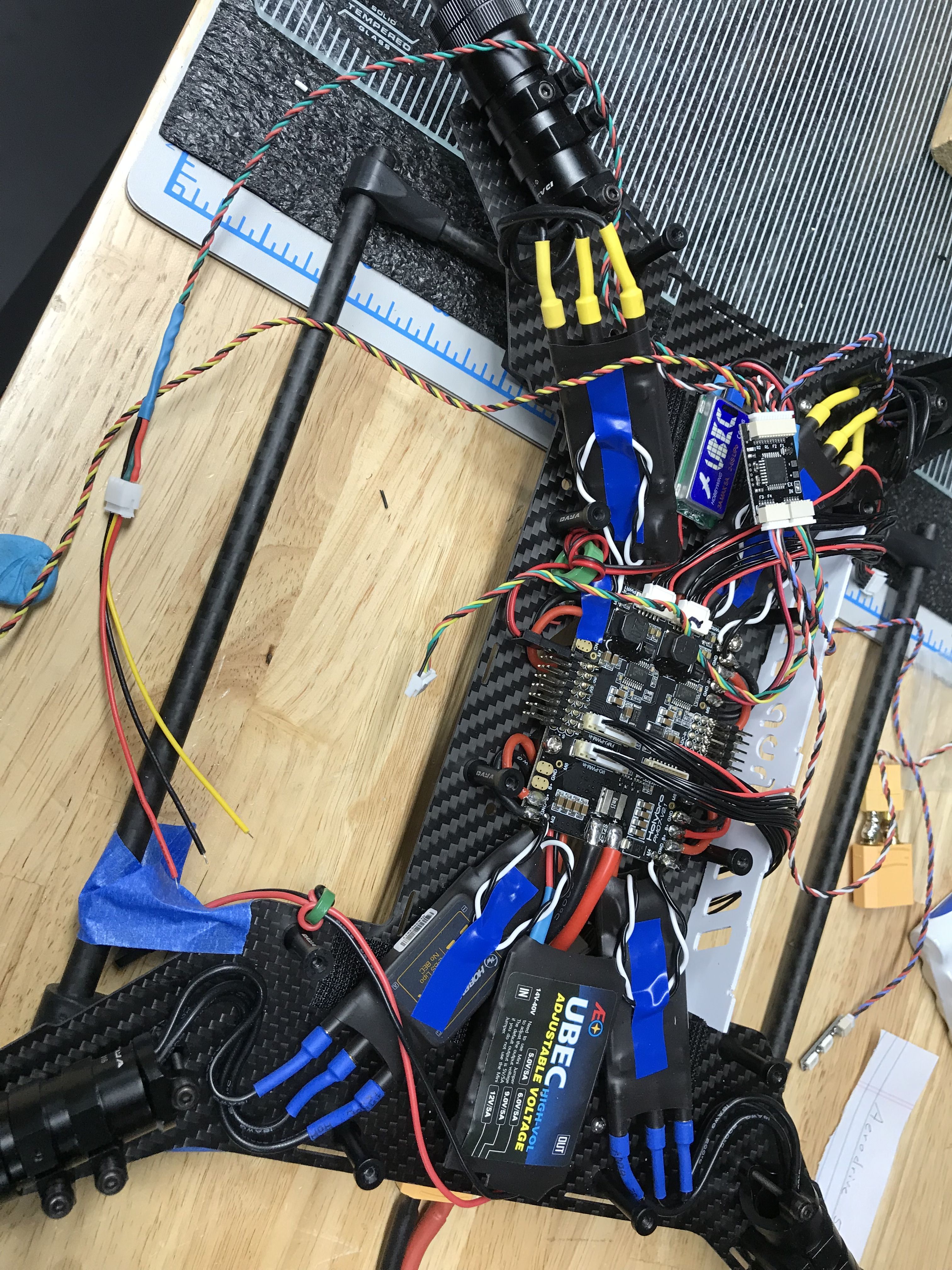
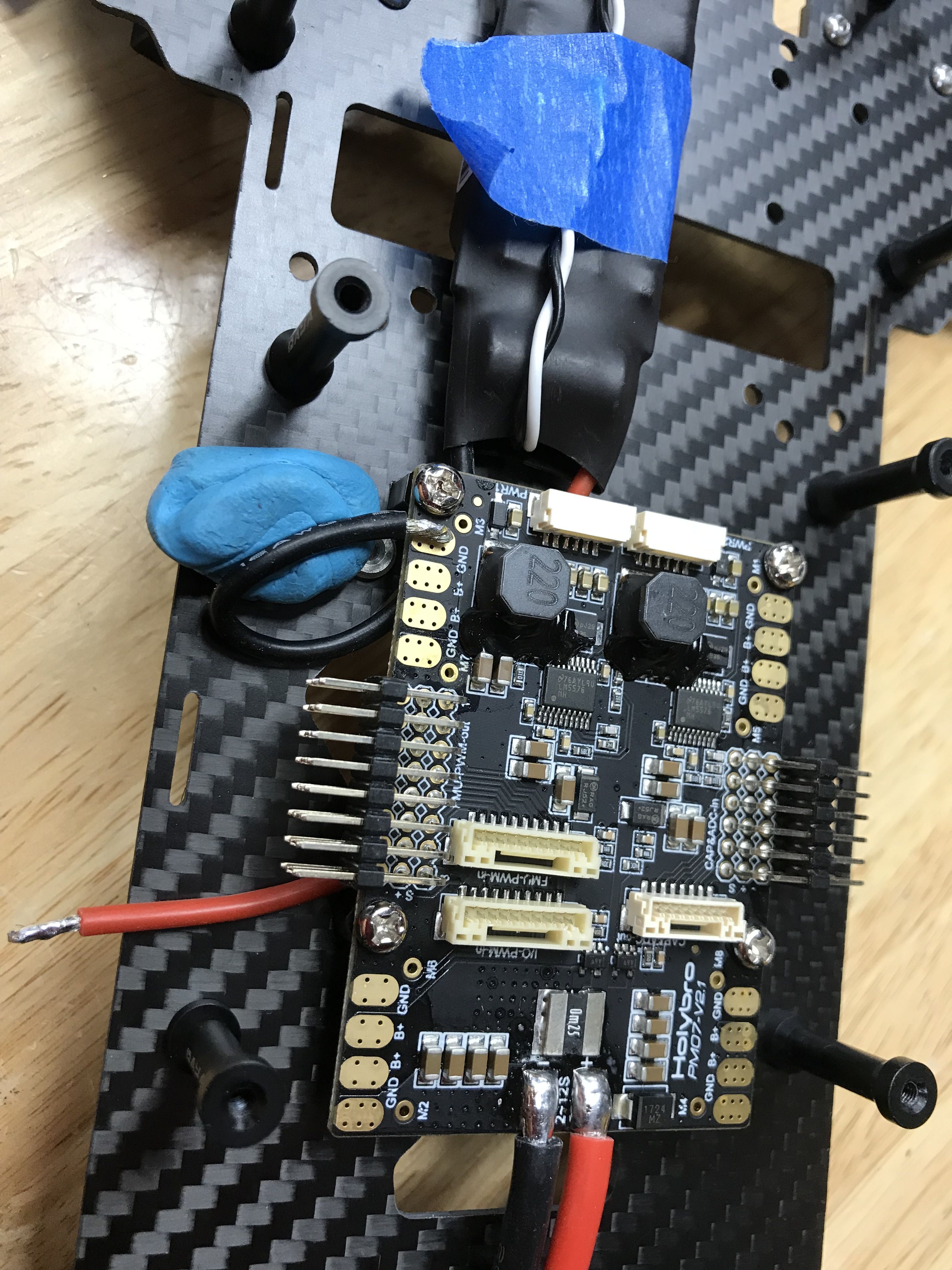
- The nest of wires you see on some of the photos was me trying to figure out the best way to create wiring harnesses and power distribution for both the 12V and 5V equipment. I tried to wire everything to be easy to modify and maintain.
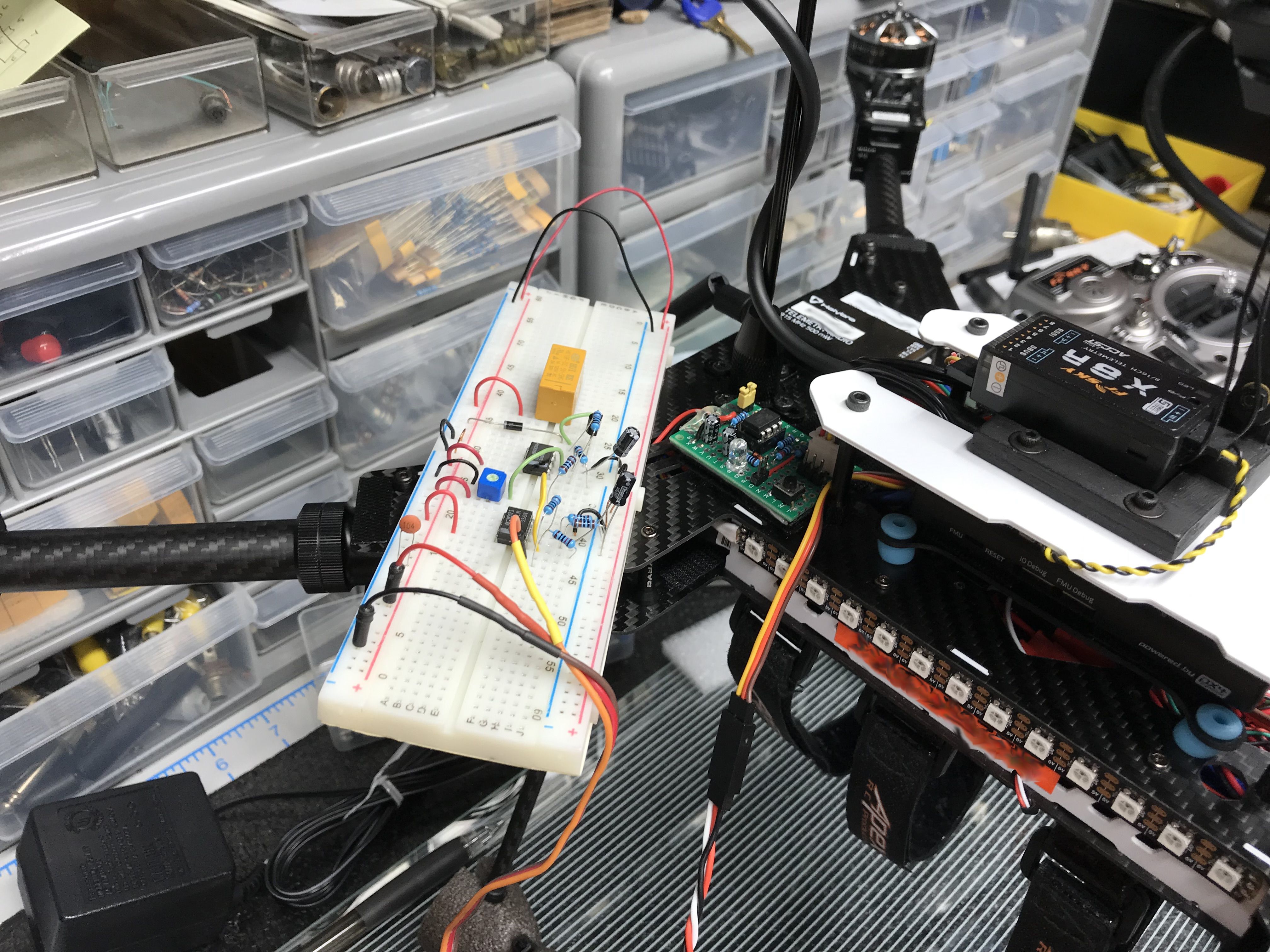
- I added a custom noise filter (large 1000 ufd electrolytic capacitor and a hand-wound toroidal choke) to the 12V power supplied to the video transmitter and runcam. This greatly reduced the noise I was getting on the video feed.
- Big shout-out to cjdavies (https://rotorbuilds.com/build/12718). I studied his build before deciding to build mine based on the same frame. Thanks, man!
Long Range Update:
I replaced the FrSky X8R with an FrSky R9 900 MHz long range receiver with diversity and S.Port telemetry. I also replaced the Holybro 900 MHz telemetry transceiver with a WeMos D1 Mini Pro with WiFi. I'm boosting the WiFi signal with a Turbowing 2.4GHz 1W amplifier for air-to-ground telemetry to/from Mission Planner. Esentially, this was a drop-in long-range conversion. No substantial modifications were required. I also added a GoPro Hero7 on a Geocalla G4-3D gimbal for higher resolution video. Disappointed that the WiFi range on the GoPro for live preview is only 35 to 50-ft, whereas the Mobius give a live analog stream that can be sent to the VTx.
Photos
























Part List
Show stores (17)
Beautiful,bro. My daya680 lack of a part, it's used to fix aircraft arm, could you please sell me one ? I've looked for it for weeks

Terrific build, I also was inspired by CJDavies when building out my DAYA 680 :)


Nice! That MAVLink LED controller is really neat, I had no idea such a thing even existed!

I started to build my own MAVLink LED controller with an Arduino Mini, but then I found the "elechawk" controller and purchased from AliExpress. It works great but only controls up to 4 LEDs per its 6 channels (came with 2 LEDs per channel)...saved me a ton of time! For max number of LEDs, you must power it from an external 5V source (not the flight controller) because max current demand would be 60mA x 24 LEDs = 1.4A You can wire it to the TX only from your telemetry port to the RX on the LED contrller (the controller dosen't need to send data back to the flight controller). It also comes with software and a TTL to USB adapter for configuring the LED colors and the control channel; if you want to be able to turn on/off from your transmitter.

this thing is PACKED
Excelllent choice of words! Yeah, I forgot to take a picture just before I got all the wiring harnesses in place before buttoning it up. Next time I have it apart, I'll snap another pic of the guts. Besides the four huge ESCs and the power management board, I had to squeeze two additional BECs (12V and 5V), a Mavlink LED controller, a remote switch, a power filter, etc. Tight fit, but the frame has a ton of space inside. Thanks for the comment and like.








what is the actual AUW and what is the maximum flight time?
Hi Sudhir -- The empty weight (no batt, no camera) is just under 3-lbs. The AUW (with battery) depends, of course on the battery installed and any payload. I generally use a 8000 mAhr batttery that is a little over 2-lbs (in the 2.1 to 2.6-lb range), so the AUW is around 5-lbs; plus maybe another 0.25-lbs for payload. With that configuration, I get about 20 comfortable minutes flight time if I don't fly it like a maniac. I do have other batteries that are a bit heavier and have more capacity, however, I tend to get the best overall performance from my 8000 mAHr batteries.