
Dearest wrckit,
You wanted a micro. You had a frame, but no parts. I had lots of spares, and wanted to spread the micro love, and so it naturally came to pass. This is the story of your Atom mini.
Hello Atom my old friend
I also had the original Airblade/RotorX Atom Mini 83 - in fact it was my first brushless build - a hell of choice for a first build. I built mine up with 20x20 electronics as a 3S 2" screamer - it was probably >85g dry, ~130g AUW. 130g of angry bees. Sadly, that build met its end after one too many hard crashes onto concrete.
Since then, I've gravitated towards lightweight 2S builds using 16x16 electronics, and I've been having tons of fun. I was curious if I could build your Atom w/ 20x20 electronics and still have it be viable for 2S by making it lighter, now that I have a few micro builds under my belt.
Weightwatchers
I used the same stack that I had in my own Atom mini, the Omnibus nano f3 and Cicada 10A. I used 1103s instead of 1105s, and generally tried to build clean and tight. But even so, it was not to be... It was ~60g dry, kinda loud, and disappointing thrust-to-weight. On 2S, it needed ~40% throttle just to hover - not fun. I tried a few 3S packs and it was the powerful screamer that I remembered, but then it was getting heavy...
I came to a fork in the build: light, agile 2S neighborhood/proximity quad, or heavy, punchy 3S mini rocket?
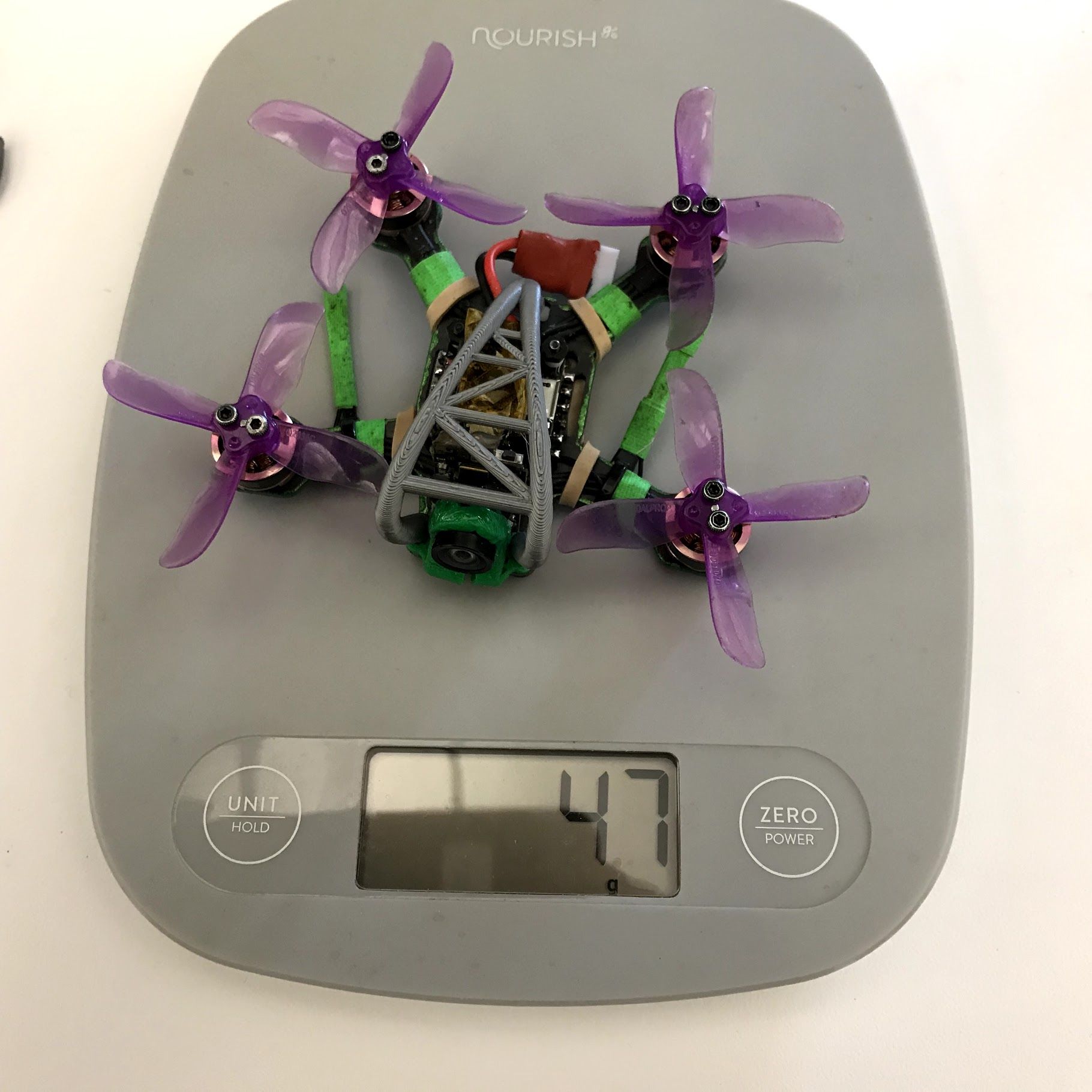
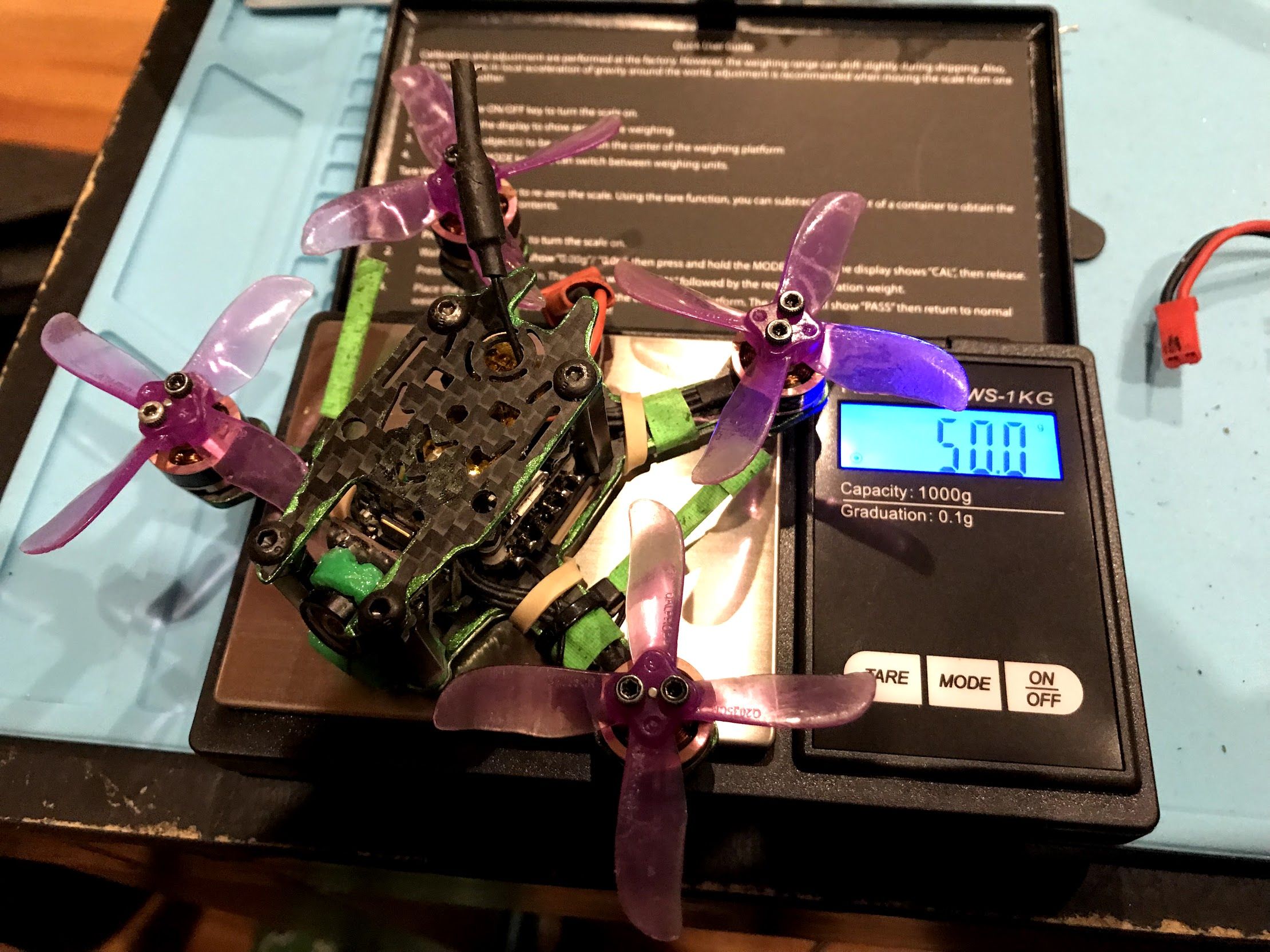
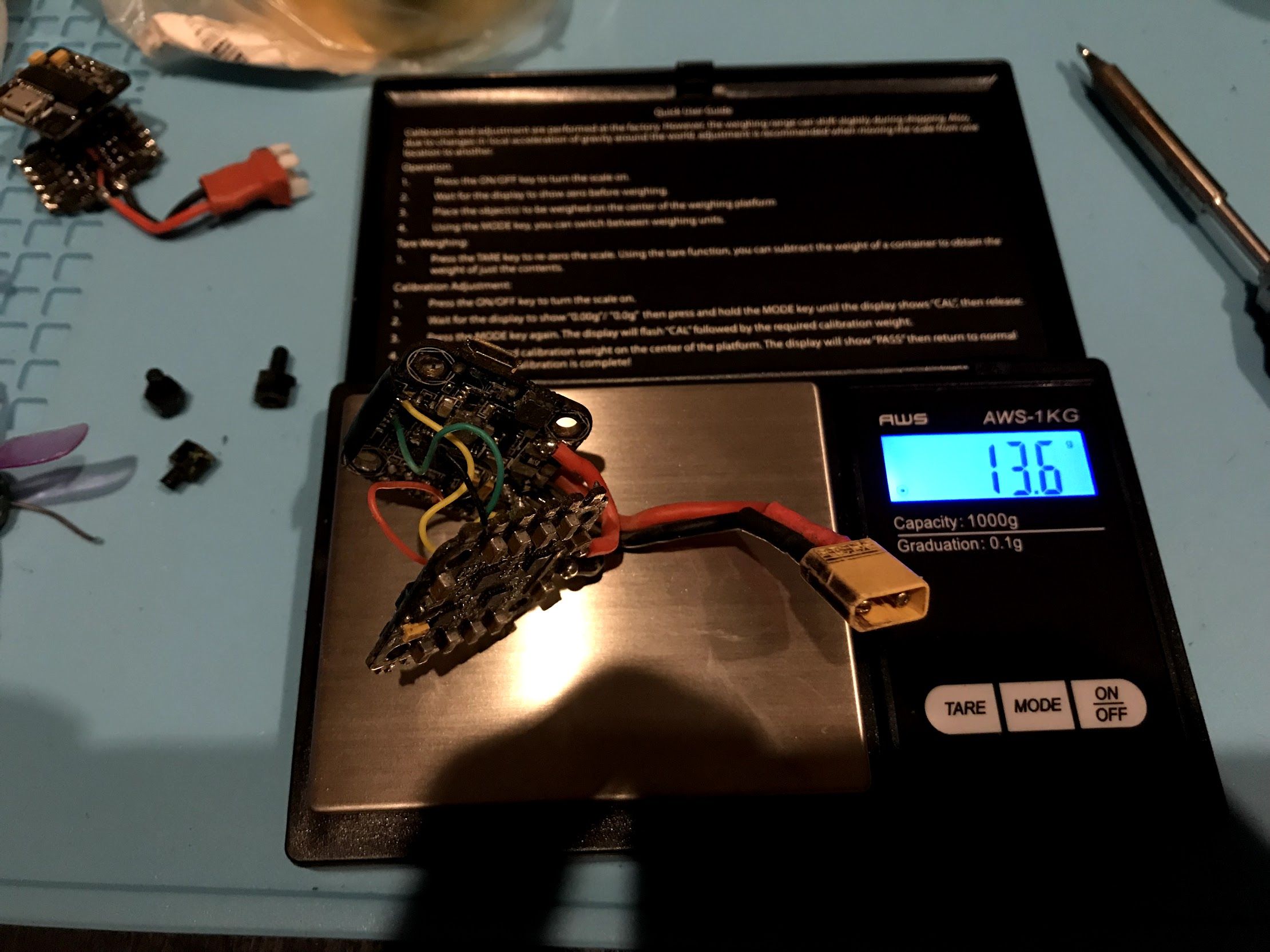
I decided to go light. I replaced the 20x20 electronics with a 16x16 2S-only stack, mounted with VHB. That cut 7g, plus 4 steel M3 screws, down to ~50g. But it still left something to be desired: with 300mah 17g packs, it felt quiet and agile, but flight times were <2 minutes; with 450mah 32g packs, it got decent flight time, but got much louder and thrust-to-weight collapsed again.
WRCKITX
I started looking for other weight to cut. There was still a lot of hardware: 6 steel M3 screws to hold the camera and top plate in place. Going to nylon would have saved a lot, but I really hate nylon hardware. I started thinking about if I could ditch the top plate and hardware altogether.
I started to design some canopies. Several very ugly iterations later, I went with a decidedly RotorX-inspired design. Very minimal, only 1.7g, still provides decent protection for the electronics. It's fairly thin TPU, so the camera is still going to see some impacts, but I also designed a light custom camera mount in TPU that has some give, so I'm hoping it'll be a bit more resilient. It attaches to the bottom plate with 3 M2 screws instead of 6 M3. That help cut another few grams.
Kill those Volts
Despite cutting another ~8% in weight, down to ~46.5g, it still didn't feel up to snuff.. The original problem still remained: power vs. flight time. My 32g Glacier 2S 450mah packs just felt too heavy on these 1103 8000kv Eaglepower motors. I decided to try the 10000kv Racerstars, hoping that they wouldn''t ruin battery life even more. They're also slightly lighter, and would save ~1.5g in total. Plus they come in purple.
Send it!
The 10k kv gives this guy the kick I was looking for. With a ~20g 300mah, it's reasonably quiet and pretty darn agile, though flight times are a little low, under 2.5 minutes or so doing light acro + cruising. With a ~30g 450mah, it's no longer that quiet, but it carries its weight well and flight times are closer to 3.5 minutes. A 350mah middle ground would be nice to explore, but I've been holding onto this guy for far too long.
Hope you have fun with it, wrckit!
Appendix: owner's manual
Binding
The R-XSR is on top of the stack. The bind button in on the back left, when looking down on the pod. You can just shove the canopy to the side to reach the bind button.
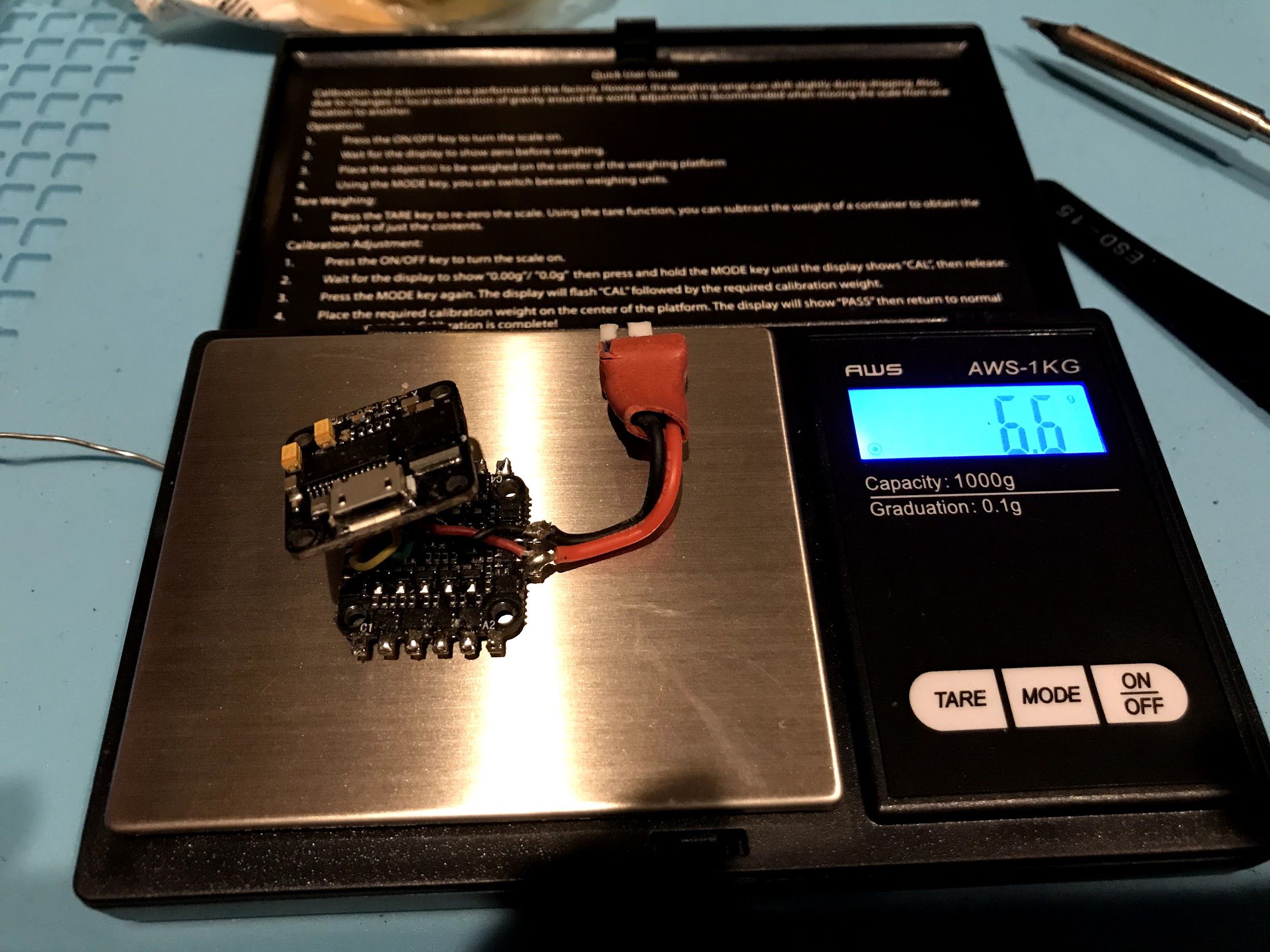
Battery lead
I've been using 2S balance connectors on all my light micros. It's not the best - they tend to get damaged in hard crashes and they stop mating securely, they're a slight pain to unplug, and I'm sure there's more resistance than XT30 or JST-RCY. But it saves 1g, is a bit more compact (especially than JST-RCY), and it means you can use any 2S battery without modification. I've thought about going to XT30 for everything, converting all my batteries over, but I've been too lazy :-). If you go with XT30 for everything, go for it though! Definitely better quality of life.
Batteries
I included two each of:
- Glacier 450mah: 31g
- Airblade Premium (Bonka) 500mah: 32g
- Airblade Basic (Tattu) 300mah: 20g
(I also tested the Turnigy nanotech 300mah (17g), but mine are old and not as nice as the Airblade 300). On the 300mah batteries, it feels nice and agile, but doesn't last long. You get nice flight times on the 450 and 500mah ones. I didn't test the Airblade batteries extensively, since I just got them (they probably have 2-3 cycles through them, nice and fresh feeling). The Glaciers are older, but still hold up reasonably well.
PIDs
Get loose
I mostly flew it with a fairly loose tune. It works reasonably well for the DAL Cyclones 2035 as well as the RotorX/Gemfan 2035bn, and also reasonably well for batteries from 20-30g. There's definitely still some prop wash, but I thought lower would be more conservative. These should be on the FC as PID profile 1.
Roll: 27, 45, 22
Pitch: 40, 55, 40
Yaw: 70, 45
Antigravity gain: 5.5
Fliters: dynamic filtering on, PT1, both gyro notches off.
Sharper
Before I sent it, I spent a few short packs pushing the PIDs to make it feel sharper and have less propwash. I didn't test this super extensively though, so please be mindful of motor temps! These should be on the FC as PID profile 2, and also the currently selected PIDs:
TODO: recover PIDs from DVR
Props
I like the DAL cyclones because they stand up to abuse pretty well. The RotorX/Gemfan 2045BN are better for this build, I think - quieter and slightly lighter. But they bend a lot in crashes, making turtle mode unusable often. So I typically fly the Cyclones, and only use the RotorX/Gemfan when I want more quiet, and I don't take quite as many risks. (Oh BTW: the RotorX's bending is (part of) why I got stuck behind that fence. You remember the fence.)
On some motors, the RotorX/Gemfan are tight enough to not need prop screws. But the Racerstar motor shaft is a bit too short for that to feel secure, so it's probably safer to pay the 2g prop screw penalty.
I also included 1.9" RotorX/Gemfan hulkies. They're cute little guys, durable, don't bend that easily. They're going to generate less thrust, but I was thinking the added prop clearance might work well on this build. The Atom mini prop clearances are pretty tight, especially the distance between the back 2 props. I think going to 1.9" might create less turbulence and be quieter. I didn't think to test this because sometimes my brain doesn't work well, but give it a shot if you wanna experiment!
Motor mapping
I typically just wire things up in the most convenient/neat way possible, and then remap motors in software. I have no idea how the ESC<->FC signal wiring is mapped, plus I kept the motor wires long by wiring to ESCs that were further away, in order to maintain some slack (not to mention these Racerstar motor wires are really annoying to strip and tin).
Photos

























awesome build!!! i love the little guys